




国产轻量级桌面GIS软件Snaplayers实践:智能农机无人驾驶作业鱼尾路径规划
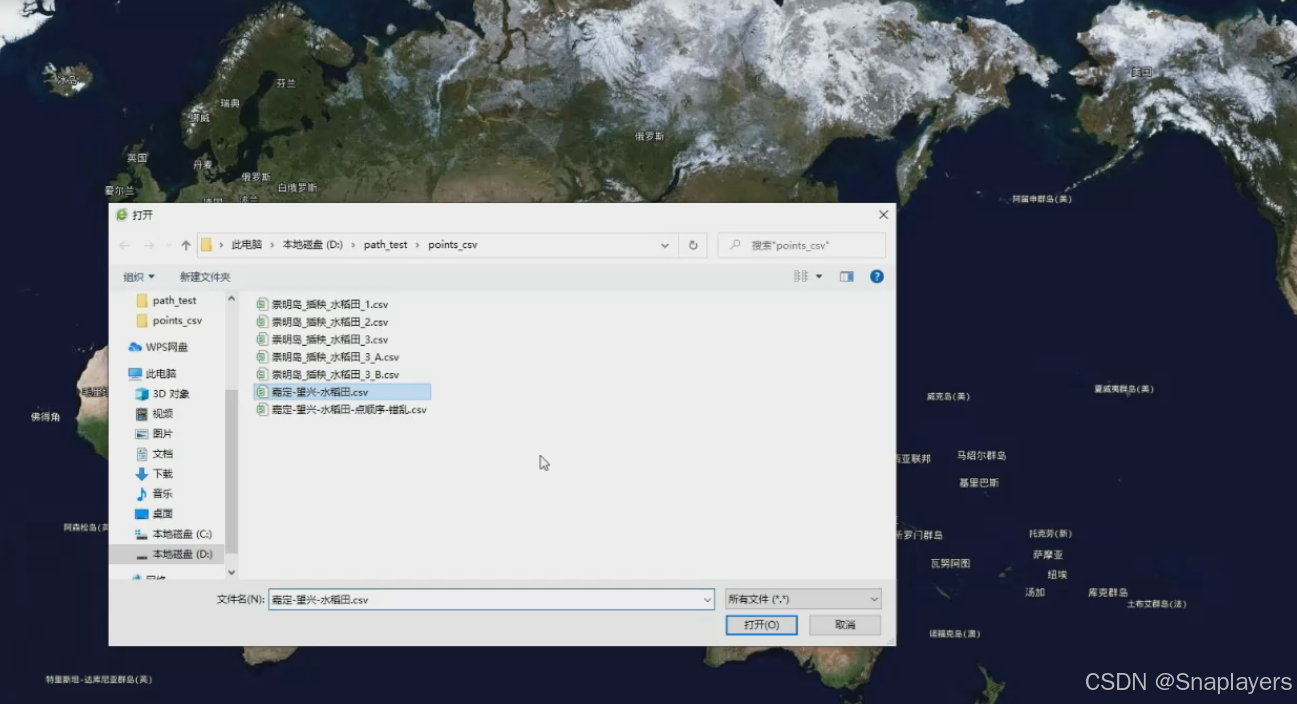
1、选择地块角点坐标文件
2、加载地块到地图中

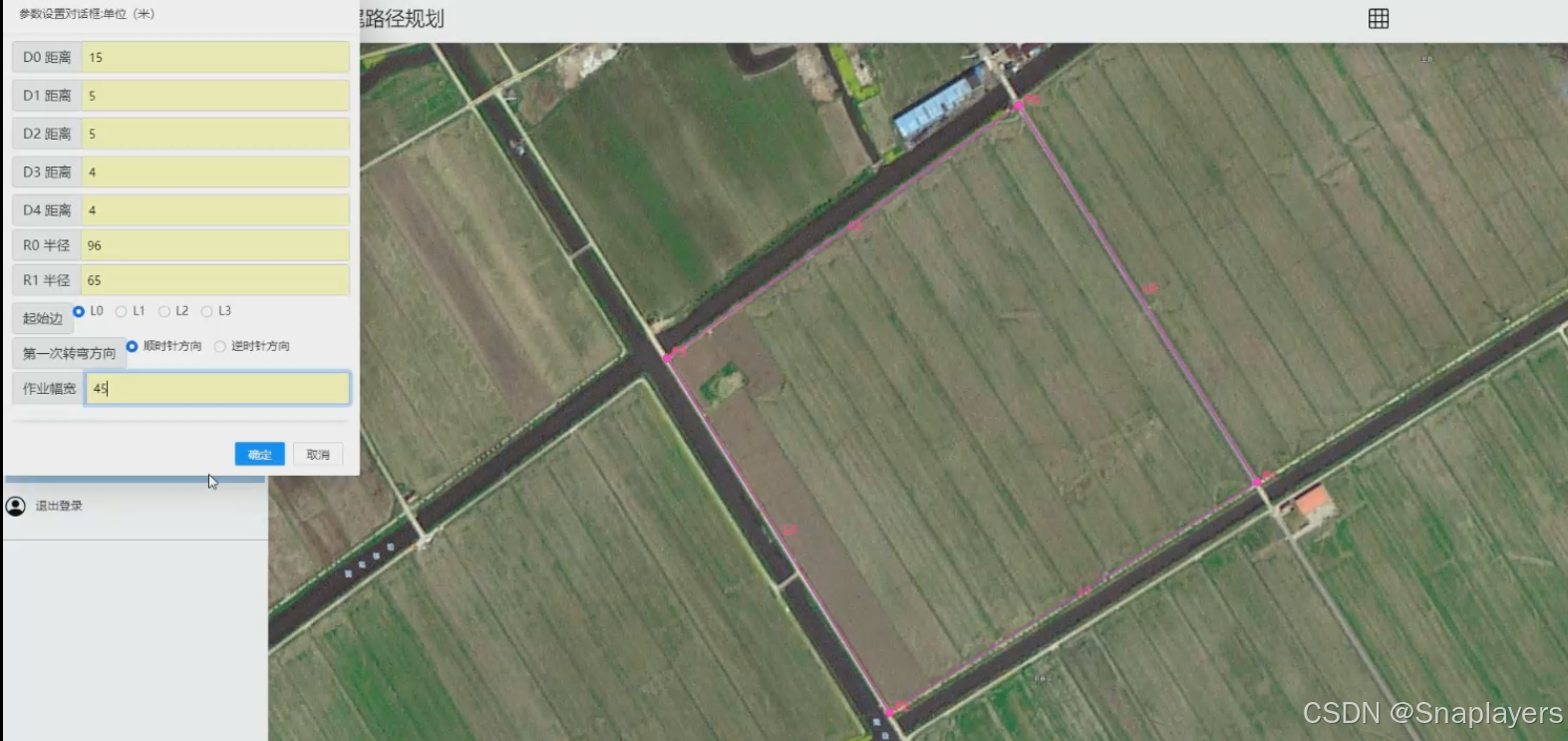
3、设置鱼尾路径作业的参数
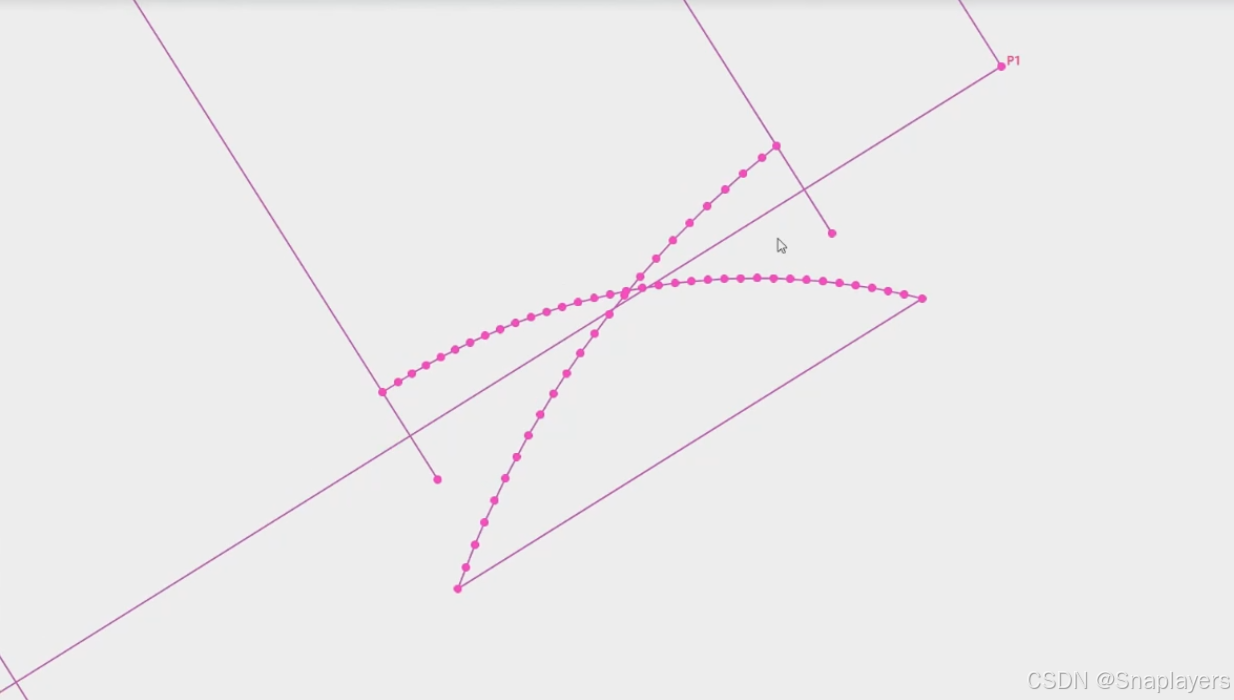
4、鱼尾路径规划算法生成鱼尾作业路径
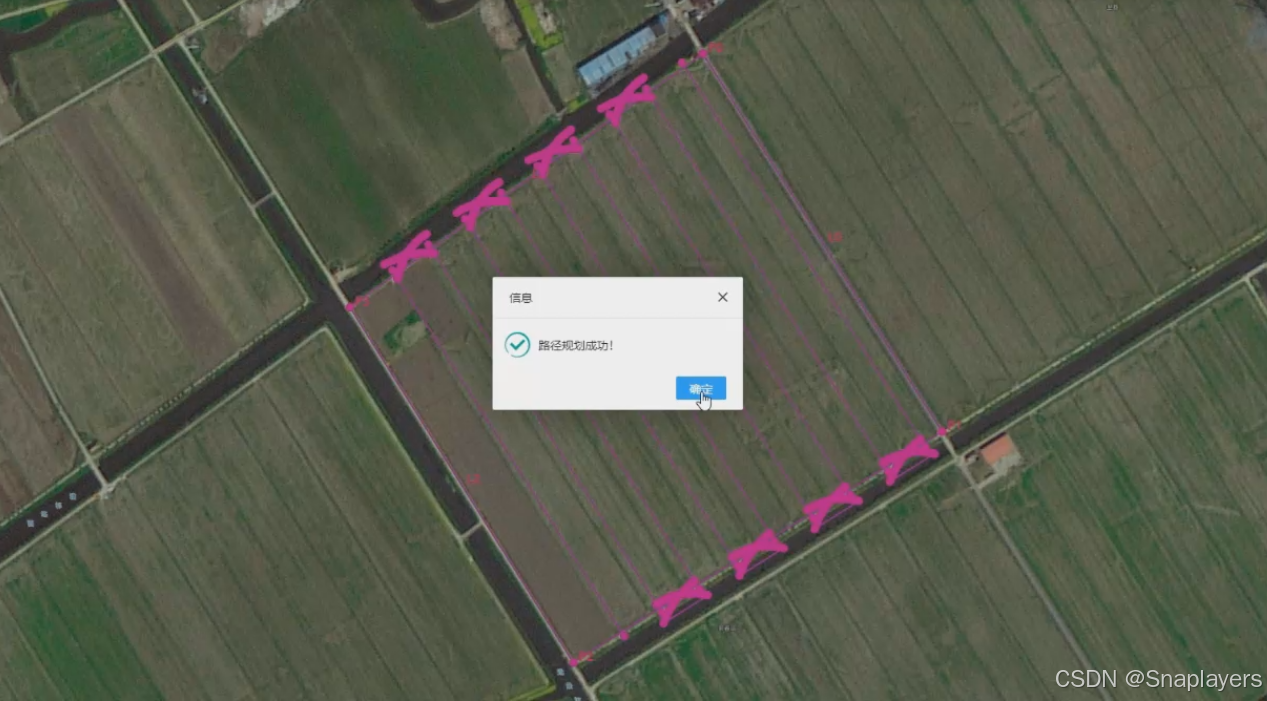
5、查看鱼尾路径
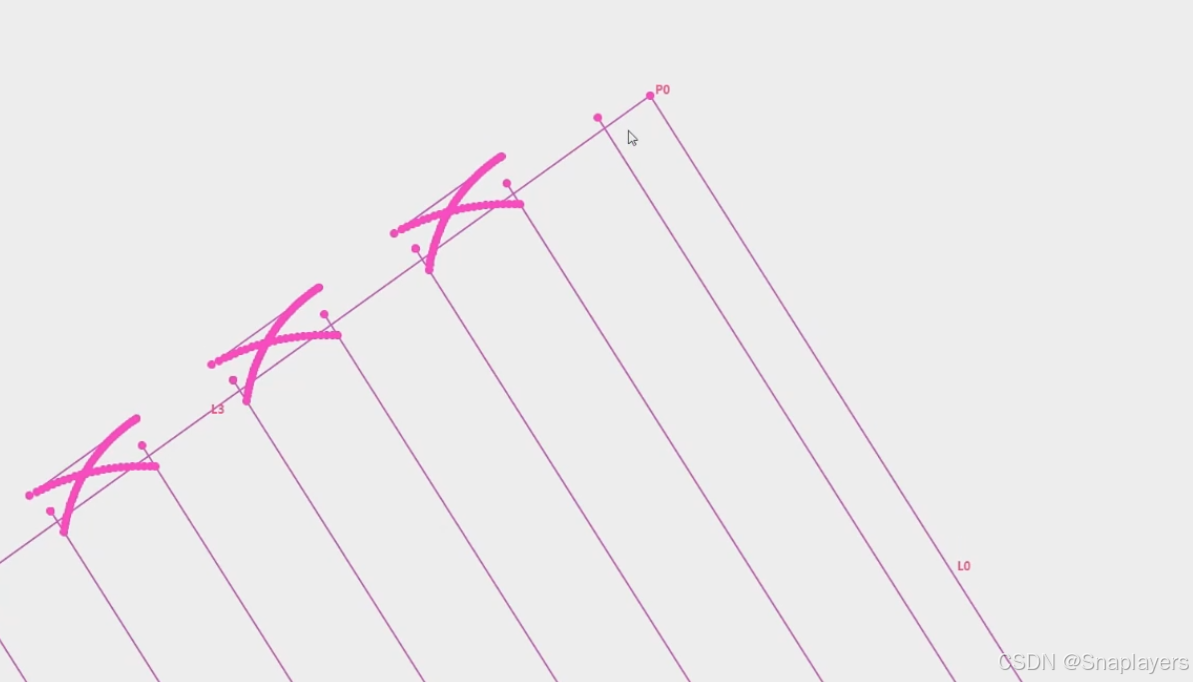
6、查看鱼尾路径
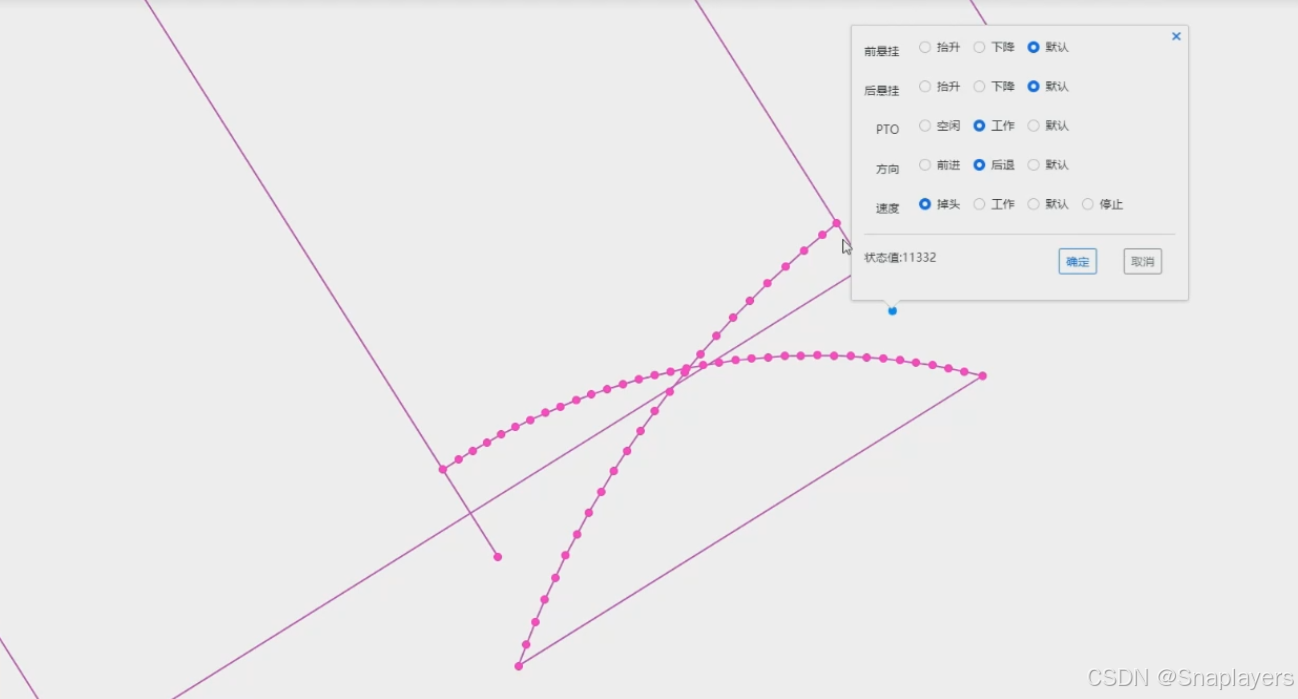
7、还可以临时设置、更改路径点的作业动作
8、完成
本算法已经在国内外等农场已经使用多年。
Snaplayers研发团队承诺:国产轻量级桌面GIS软件Snaplayers永久免费并持续更新
Snaplayers研发团队承诺:国产轻量级桌面GIS软件Snaplayers永久免费并持续更新

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 970
970





