




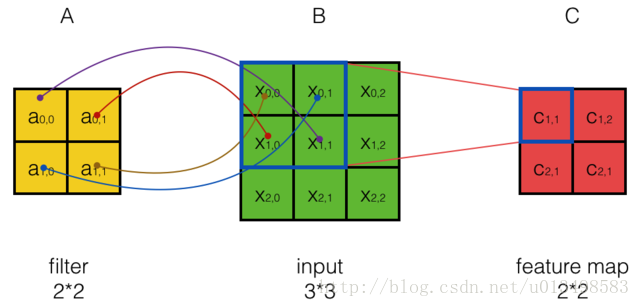
1、什么是卷积:图像中不同数据窗口的数据和卷积核(一个滤波矩阵)作内积的操作叫做卷积。其计算过程又称为滤波(filter),本质是提取图像不同频段的特征。
其实CNN中的卷积并不是真正的卷积运算,而是一种互相关(cross-correlation)运算

卷积(convolution):
S=f(t)*g(t-i)
互相关(cross-correlation):
S=f(t)*g(t+i)

从图中很明显看出来,Convolution相当于把函数g反转180度在与f函数运算;而Cross-correlation相比卷积则少了那个反转,相当于直接进行矩阵相乘。
2、什么是卷积核:也称为滤波器filter,带着一组固定权重的神经元,通常是n*m二维的矩阵,n和m也是神经元的感受野(相当于对图像取的窗口大小,比如一次从128*128的输入图像中只取3*3的一个小窗口进行分析)。n*m 矩阵中存的是对感受野中数据处理的系数(W权重)。filter_size是指filter的大小,例如3*3; filter_num是指每种filter_size的filter个数,通常是通道个数
feature map(特征映射):原始图像数据通过卷积核处理可以用来提取特定的特征(例如可以提取物体轮廓、颜色深浅等表现物体信息的特征)。通过卷积层从原始数据中提取出特征的过程又成为feature map(特征映射)。即每个卷积核只能提取一种相应的特征,每个卷积核对应一个特征映射,也就是feature map。
3、什么是卷积层:多个滤波器叠加便成了卷积层。
4、一个卷基层有多少个参数:一个卷积核使用一套权值以便”扫视’数据每一处时以同样的方式抽取特征,最终得到的是一种特征。 在tensorflow定义conv2d时需要指定卷积核的尺寸,本人现在的理解是一个卷积层的多个卷积核使用相同的m*n, 只是权重不同。 则一个卷积层的参数总共m*n*filter_num个,比全连接少了很多。
5、通道(chennel)怎么理解:一般为RGB三通道
6、几个参数:
a. 深度depth:卷积核个数,决定输出的depth厚度,卷积核尺寸决定输出长宽。
output(输出像素)= (input输入像素 - F卷积核长宽尺寸 + 2*P填充值)/stride卷积核每次移动的步长 +1
比如(7-3)/2 +1=3 ,所以下文中输出为3*3矩阵
b. 步长stride:决定移动多少步可以到边缘。
c. 填充值zero-padding:在外围边缘补充若干圈0,方便从初始位置以步长为单位可以刚好滑倒末尾位置,通俗地讲就是为了总长能被步长整除。
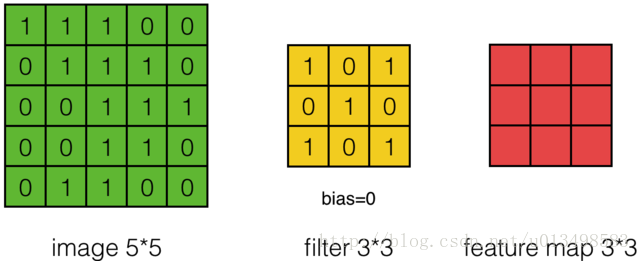
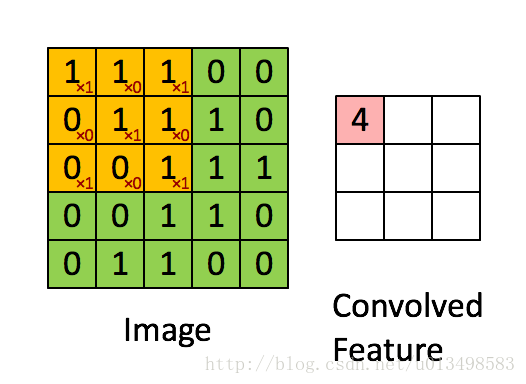
7、计算例子:
解析:图中input 7*7*3中,7*7代表图像的像素/长宽,3代表R、G、B 三个颜色通道,可以看到周边有填充0; 有两个3*3*3的卷积核Filter w0、Filter w1(3*3代表取的窗口长度*宽度,后面一个*3代表通道个数,RGB三个通道),每个filter对应每个通道有一组3*3的w权重;一个filter滑动到一个位置后计算三个通道的卷积,求和,加bias,得到这个filter在该位置的最终结果;每个卷积核的输出是各个通道的汇总;输出的个数与filter矩阵维数相同。两个卷积核,最后的output为3*3*2,其depth=2。窗口每次移动两个步长取3*3的局部数据,即stride=2。外围填0部分为一位,所以zero-padding=1。
1的计算过程:
第一个通道和对应权重的结果:0*1+0*1+0*(-1)+0*(-1)+0*0+1*1+0*(-1)+0*(-1)+1*0 = 1
第二个通道和对应权重的结果:0*(-1)+0*0+0*(-1)+0*0+1*0+1*(-1)+0*1+0*(-1)+2*0 = -1
第三个通道和对应权重的结果:0*0+0*1+0*0+0*1+2*0+0*1+0*0+0*(-1)+0*0 = 0
偏置:1 所以1+(-1)+ 0 + 1 = 1

转载自https://blog.youkuaiyun.com/cheneykl/article/details/79740810

















 1423
1423

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









