




https://access.redhat.com/solutions/3949931
SOLUTION 已验证 - 已更新 2019年四月19日03:48 -
环境
- Red Hat Enterprise Linux 8
- GNOME Session
问题
- The Application menu is not available in RHEL 8 GNOME session.
- How do I find an application I need to run in GNOME?
决议
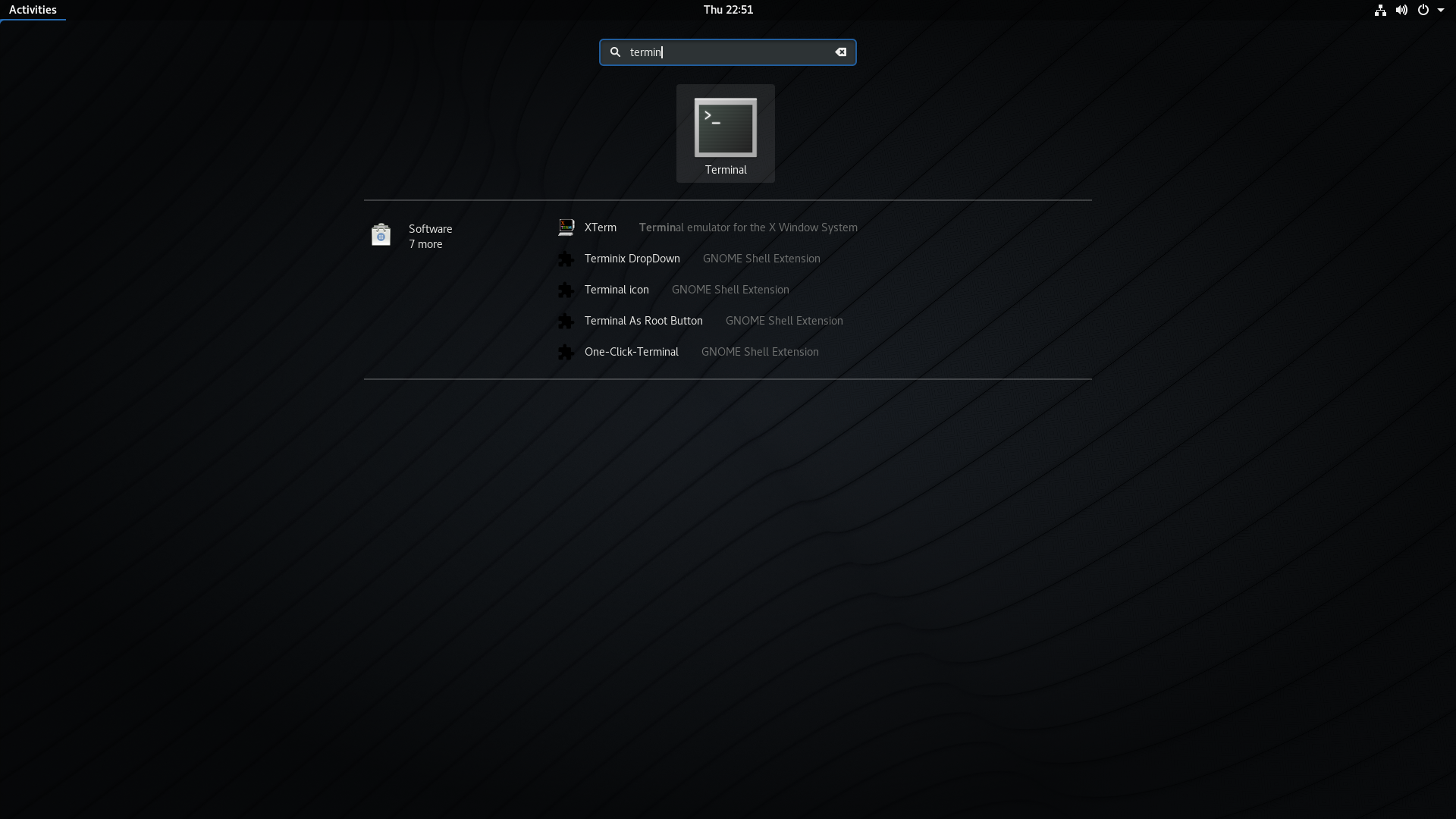
- The GNOME session provides "Activities" overview to find the required application. There are two ways to open it. Either click Activities tab at the left end of the top panel, or just move the mouse cursor firmly into the upper left corner.

- Then search for the application by it's name and click on the icon to open it:
Application menu can be enabled in RHEL8 Beta GNOME session. For details, refer: How to enable Application menu in RHEL8 Beta default GNOME session?

















 4377
4377

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









