 嵌入式微处理器架构与分类详解
嵌入式微处理器架构与分类详解








 超级会员免费看
超级会员免费看
目录
1.1 冯·诺依曼结构(Von Neumann Architecture)
1.2 哈佛结构(Harvard Architecture)
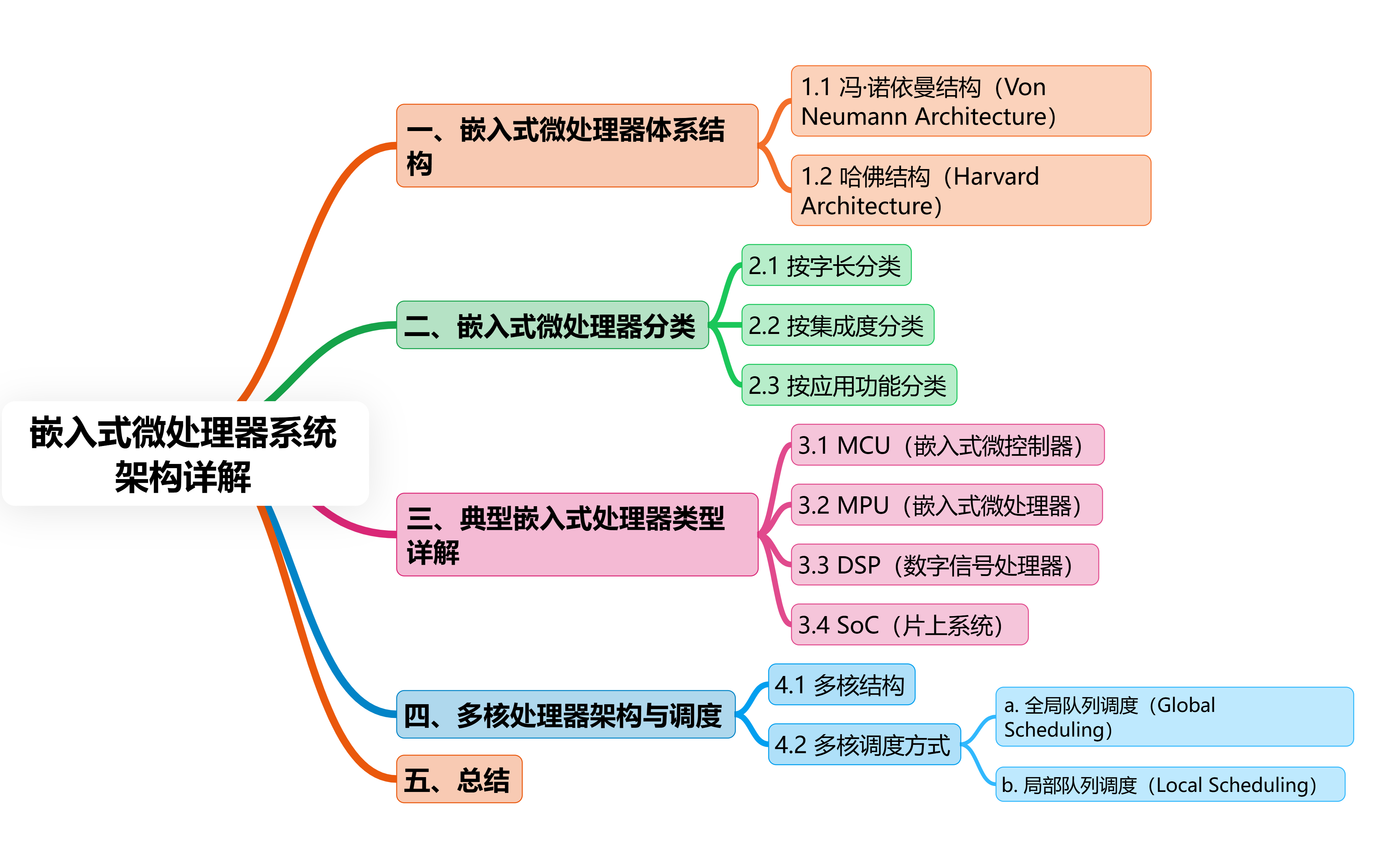
一、嵌入式微处理器体系结构
1.1 冯·诺依曼结构(Von Neumann Architecture)
冯·诺依曼结构是传统计算机体系结构,又称普林斯顿结构,其特点为:
-
程序和
目录
1.1 冯·诺依曼结构(Von Neumann Architecture)
1.2 哈佛结构(Harvard Architecture)
冯·诺依曼结构是传统计算机体系结构,又称普林斯顿结构,其特点为:
程序和
 2258
2566
4536
2258
2566
4536

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























