




先说结论:CLCameraXConverter,使用这个开源工具,即可实现所见即所得、优化的性能体验!
一. 当前CameraX结合实际使用的问题
CameraX 是Google的官方库Jitpack中的一个组件,可以快速便捷的使用Android设备相机进行预览、拍照、图像分析与录制视频。告别繁琐的Camera2与弃用的Camera。
使用虽然方便,但是依然有不少需要工程中去处理的问题,比如,想通过CameraX的ImageAnalysis图像分析通道进行帧数据提取,再进行一些图像操作(人脸识别、OCR等),它默认输出的是一张完整的相机视野图片,而不是“预览视野图片”。
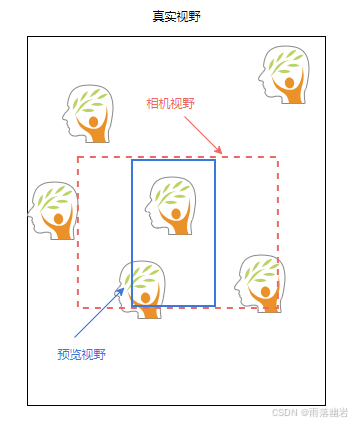
如上图,所以多出去的部分,是“浪费”。画面中都看不到的地方,还需要拿来做识别浪费计算资源吗?右侧被裁掉的也识别出一个人脸,有用吗?现在的机器学习都需要占用大量CPU时间,多出去的部分去除也可以提高不少识别速度。
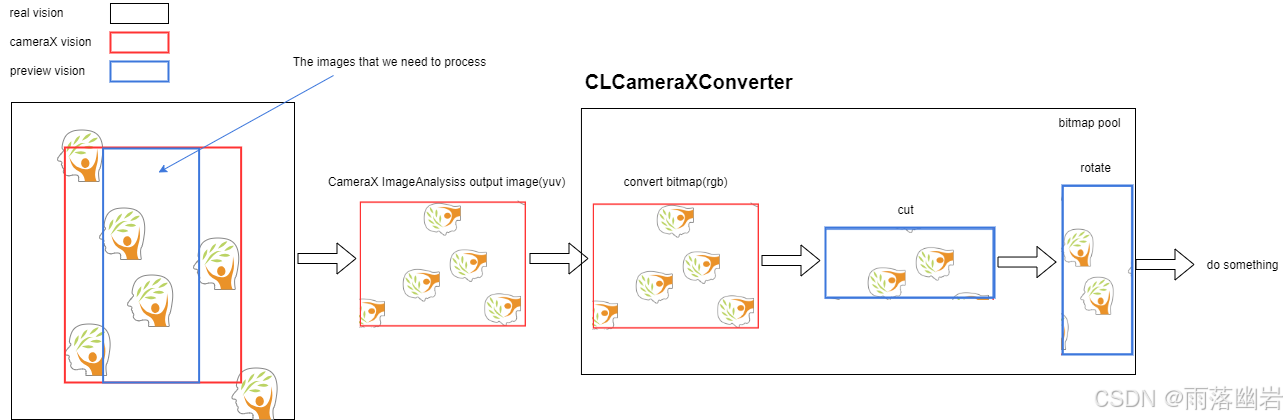
CLCameraXConverter架构图如下:
二. CameraX1.0.0稳定版前的做法
稳定版本之前,如果想将CameraX输出的ImageProxy转换为Bitmap再进行裁剪、旋转等操作,需要使用 RenderScript 进行转换,做过Android原生图像运算的兄弟们应该知道它。简单来说就是将yuv420数据转为rgb,注意下面的工具,在转换前我就进行了裁剪处理,找到预览视野的边界矩形,比全图转换要更省内存速度也更快一些。
public class YuvToRgbConverter {
private Context mContext;
private RenderScript rs;
private ScriptIntrinsicYuvToRGB scriptYuvToRgb;
private int pixelCount = -1;
private ByteBuffer yuvBuffer;
private Allocation inputAllocation;
private Allocation outputAllocation;
public YuvToRgbConverter(Context context) {
mContext = context;
rs = RenderScript.create(context);
scriptYuvToRgb = ScriptIntrinsicYuvToRGB.create(rs, Element.U8_4(rs));
}
public synchronized void yuvToRgb(Image image, Bitmap output) {
// Ensure that the intermediate output byte buffer is allocated
if (null == yuvBuffer) {
pixelCount = image.getCropRect().width() * image.getCropRect().height();
// Bits per pixel is an average for the whole image, so it's useful to compute the size
// of the full buffer but should not be used to determine pixel offsets
int pixelSizeBits = ImageFormat.getBitsPerPixel(ImageFormat.YUV_420_888);
yuvBuffer = ByteBuffer.allocateDirect(pixelCount * pixelSizeBits / 8);
}
// Rewind the buffer; no need to clear it since it will be filled
yuvBuffer.rewind();
// Get the YUV data in byte array form using NV21 format
imageToByteBuffer(image, yuvBuffer.array());
// Ensure that the RenderScript inputs and outputs are allocated
if (null == inputAllocation) {
// Explicitly create an element with type NV21, since that's the pixel format we use
Type elemType = new Type.Builder(rs, Element.YUV(rs))
.setYuvFormat(ImageFormat.NV21).create();
inputAllocation = Allocation.createSized(rs, elemType.getElement(),
yuvBuffer.array().length);
}
if (null == outputAllocation) {
outputAllocation = Allocation.createFromBitmap(rs, output);
}
// Convert NV21 format YUV to RGB
inputAllocation.copyFrom(yuvBuffer.array());
scriptYuvToRgb.setInput(inputAllocation);
scriptYuvToRgb.forEach(outputAllocation);
outputAllocation.copyTo(output);
}
private void imageToByteBuffer(Image image, byte[] outputBuffer) {
assert(image.getFormat() == ImageFormat.YUV_420_888);
Rect imageCrop = image.getCropRect();
Image.Plane[] imagePlanes = image.getPlanes();
for (int i = 0; i < imagePlanes.length; i++) {
int planeIndex = i;
Image.Plane plane = imagePlanes[i];
// How many values are read in input for each output value written
// Only the Y plane has a value for every pixel, U and V have half the resolution i.e.
//
// Y Plane U Plane V Plane
// =============== ======= =======
// Y Y Y Y Y Y Y Y U U U U V V V V
// Y Y Y Y Y Y Y Y U U U U V V V V
// Y Y Y Y Y Y Y Y U U U U V V V V
// Y Y Y Y Y Y Y Y U U U U V V V V
// Y Y Y Y Y Y Y Y
// Y Y Y Y Y Y Y Y
// Y Y Y Y Y Y Y Y
int outputStride;
// The index in the output buffer the next value will be written at
// For Y it's zero, for U and V we start at the end of Y and interleave them i.e.
//
// First chunk Second chunk
// =============== ===============
// Y Y Y Y Y Y Y Y V U V U V U V U
// Y Y Y Y Y Y Y Y V U V U V U V U
// Y Y Y Y Y Y Y Y V U V U V U V U
// Y Y Y Y Y Y Y Y V U V U V U V U
// Y Y Y Y Y Y Y Y
// Y Y Y Y Y Y Y Y
// Y Y Y Y Y Y Y Y
int outputOffset;
switch (planeIndex) {
case 0:
outputStride = 1;
outputOffset = 0;
break;
case 1:
outputStride = 2;
// For NV21 format, U is in odd-numbered indices
outputOffset = pixelCount + 1;
break;
case 2:
outputStride = 2;
// For NV21 format, V is in even-numbered indices
outputOffset = pixelCount;
break;
default:
// Image contains more than 3 planes, something strange is going on
continue;
}
ByteBuffer planeBuffer = plane.getBuffer();
int rowStride = plane.getRowStride();
int pixelStride = plane.getPixelStride();
// We have to divide the width and height by two if it's not the Y plane
Rect planeCrop = null;
if (0 == planeIndex) {
planeCrop = imageCrop;
} else {
planeCrop = new Rect(
imageCrop.left / 2,
imageCrop.top / 2,
imageCrop.right / 2,
imageCrop.bottom / 2);
}
int planeWidth = planeCrop.width();
int planeHeight = planeCrop.height();
// Intermediate buffer used to store the bytes of each row
byte[] rowBuffer = new byte[plane.getRowStride()];
// Size of each row in bytes
int rowLength;
if (pixelStride == 1 && outputStride == 1) {
rowLength = planeWidth;
} else {
// Take into account that the stride may include data from pixels other than this
// particular plane and row, and that could be between pixels and not after every
// pixel:
//
// |---- Pixel stride ----| Row ends here --> |
// | Pixel 1 | Other Data | Pixel 2 | Other Data | ... | Pixel N |
//
// We need to get (N-1) * (pixel stride bytes) per row + 1 byte for the last pixel
rowLength = (planeWidth - 1) * pixelStride + 1;
}
for (int row = 0; row < planeHeight; row++) {
// Move buffer position to the beginning of this row
planeBuffer.position(
(row + planeCrop.top) * rowStride + planeCrop.left * pixelStride);
if (pixelStride == 1 && outputStride == 1) {
// When there is a single stride value for pixel and output, we can just copy
// the entire row in a single step
planeBuffer.get(outputBuffer, outputOffset, rowLength);
outputOffset += rowLength;
} else {
// When either pixel or output have a stride > 1 we must copy pixel by pixel
planeBuffer.get(rowBuffer, 0, rowLength);
for (int col = 0; col < planeWidth; col++) {
outputBuffer[outputOffset] = rowBuffer[col * pixelStride];
outputOffset += outputStride;
}
}
}
}
}
}基于以上工具,进行转换,然后再去旋转。需要注意的是,频繁分配堆外内存也会导致内存抖动和频繁GC。
三. CameraX1.4.0版本优化
升级CameraX版本到1.4.0以后发现,库代码里已经包含了ImageProxy转Bitmap的代码,C++实现,查了一下 源代码 是基于chromium的libyuv库实现的,直接导入的话后续升级可能有冲突,最终还是考虑用反射的方式,调用ImageProcessingUtil私有jni代码进行实现。也就产生了现在这个库 CLCameraXConverter。
- ImageAnalysis输出的图像Bitmap复用,避免频繁GC与内存抖动。
- 根据传入角度自动旋转图像,这在后续识别步骤比如OCR、一维条码处理等步骤时是必要的。
- 根据预览效果裁剪图像,所见即所得,不再是相机输出的原始大图,可以缩短后续图像处理的时间。
clCameraXConverter.imageProxyToBitmapFormPool(imageProxy,
rotationAngle,
object : CLCameraXCallback{
override fun onCLCameraXBitmap(clCameraXBitmap: CLCameraXBitmap) {
// 1. 从CLCameraXBitmap获取Bitmap
val bitmap = clCameraXBitmap.getBitmap()
bitmap?.run {
binding.ivMain.post {
// 2. 使用Bitmap做事,比如显示、人脸识别...
binding.ivMain.setImageBitmap(this)
// 3. 确定Bitmap不再使用了,主动释放,此操作会放回复用池
oldCameraXBitmap?.run {
release()
}
oldCameraXBitmap = clCameraXBitmap
}
}
}
})可能会有兄弟疑惑,这个旋转角度怎么传。这里的处理比较复杂,如果应用是锁定竖屏,那么固定传入旋转90即可,如果应用支持横竖屏切换等操作,可以参考 官方文档 确定旋转角度。
性能上避免了频繁申请Bitmap内存,避免内存抖动与频繁GC。
使用官方的CameraX的ImageProxy.toBitmap获取Bitmap,再进行裁剪、旋转获取视野中Bitmap的内存表现如下:

使用CLCameraXConverter库的一个方法完成以上三个步骤的内存表现如下:

PS:别问我为什么没把库推到Jitpack好方便直接gradle引用,因为新版的Gradle插件推不上去...
* Where:
Settings file '/home/jitpack/build/settings.gradle' line: 8
* What went wrong:
A problem occurred evaluating settings 'build'.
> Could not find method dependencyResolutionManagement() for arguments [settings_du0w93dyya4mvuwk4xgqxxi8a$_run_closure1@43fff918] on settings 'build' of type org.gradle.initialization.DefaultSettings.
* Try:
Run with --stacktrace option to get the stack trace. Run with --info or --debug option to get more log output. Run with --scan to get full insights.
* Get more help at https://help.gradle.org
BUILD FAILED in 0s
















 1435
1435

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









