




 解析SpringBoot主程序如何通过@SpringBootConfiguration和@EnableAutoConfiguration实现自动配置,深入探讨自动配置类加载机制。
解析SpringBoot主程序如何通过@SpringBootConfiguration和@EnableAutoConfiguration实现自动配置,深入探讨自动配置类加载机制。
主程序:
@SpringBootApplication:Spring Boot应用标注在某个类上说明这个类是SpringBoot的主配置类,
SpringBoot就应该运行这个类的main的主方法来启动SpringBoot应用;
点进去,组合注解:
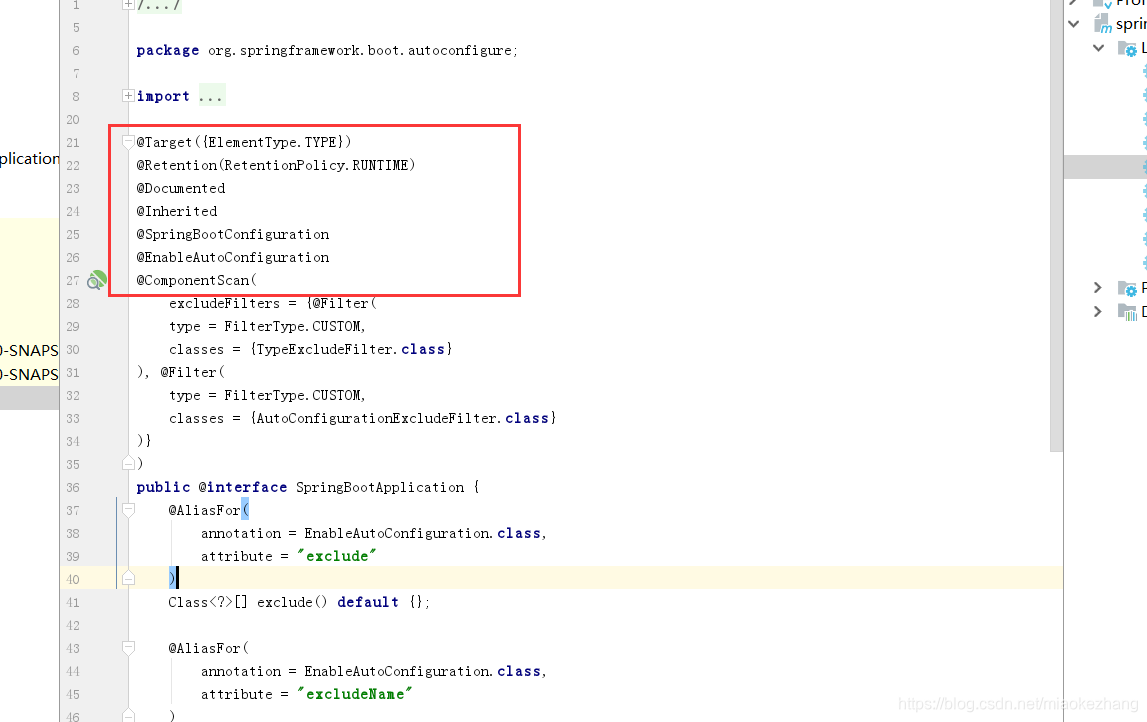
①,先看 @SpringBootConfiguration,Spring Boot的配置类:标注在某个类上,标识这是一个Spring Boot的配置类,点进去:
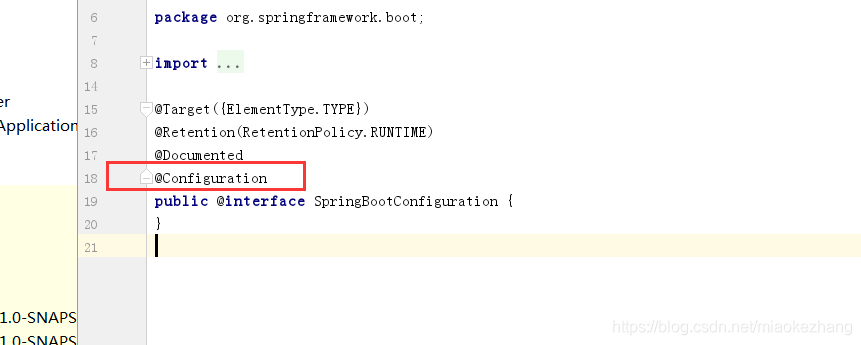
@Configuration:Spring最底层的配置注解,配置类上来标注这个注解,配置类对应着配置文件,点进去:
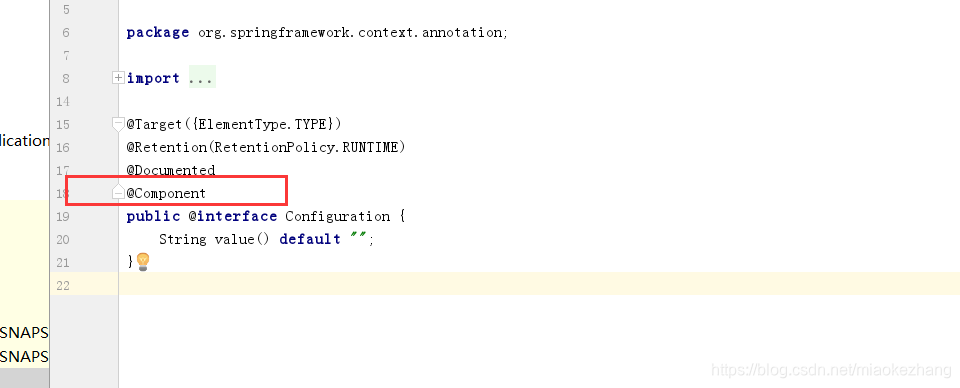
@Component:表明配置类也是容器的一个组件
②,再看 @EnableAutoConfiguration:开启自动配置功能。我们回忆一下,我们写了主程序,写了业务,用pom.xml把SpringBoot项目依赖jar包也导入进来了,但是我们却没有写配置文件或者配置类,就能够启动springboot运行成功,就是因为这个自动配置注解。点进去:
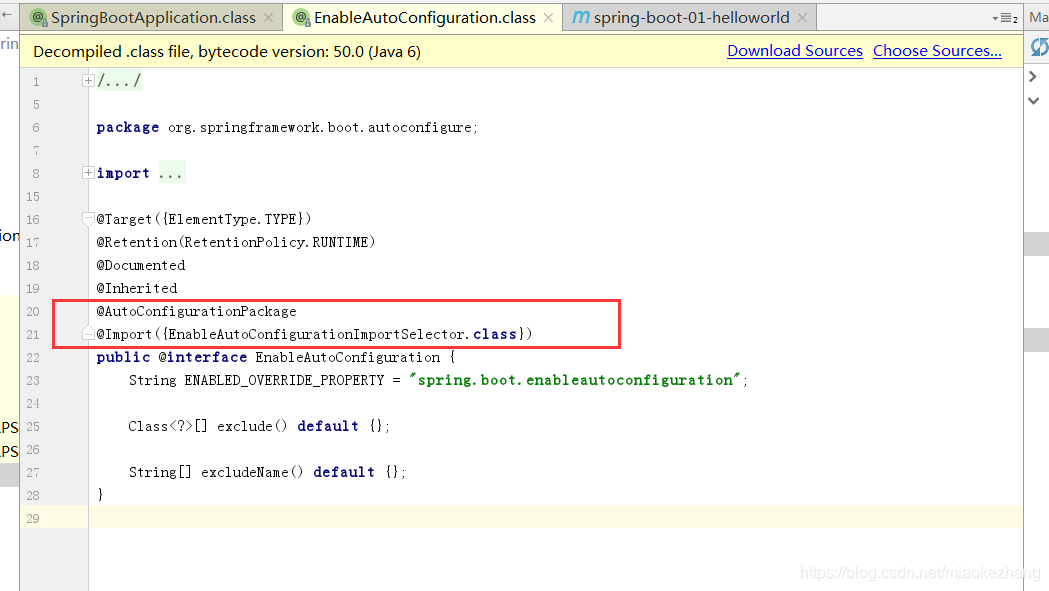
@AutoConfigurationPackage:自动配置包,点进去:
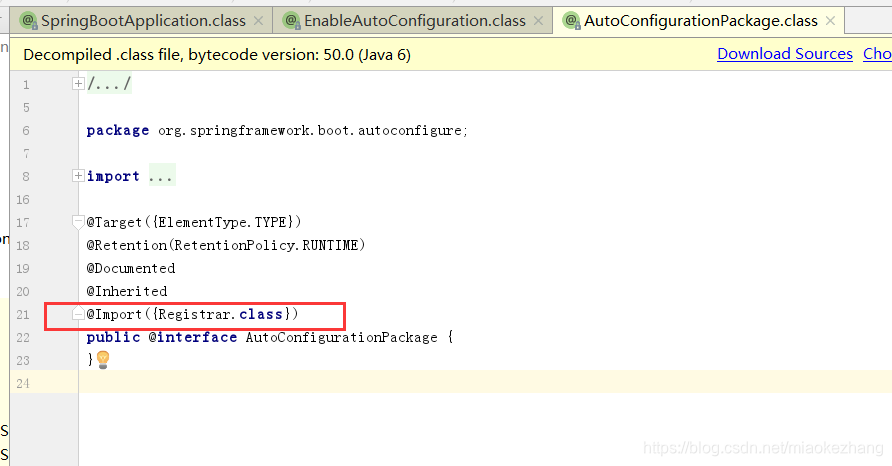
@Import({Registrar.class}):Spring的底层注解@Import,给容器中导入一个组件;导入的组件由Registrar.class完成,点进去:
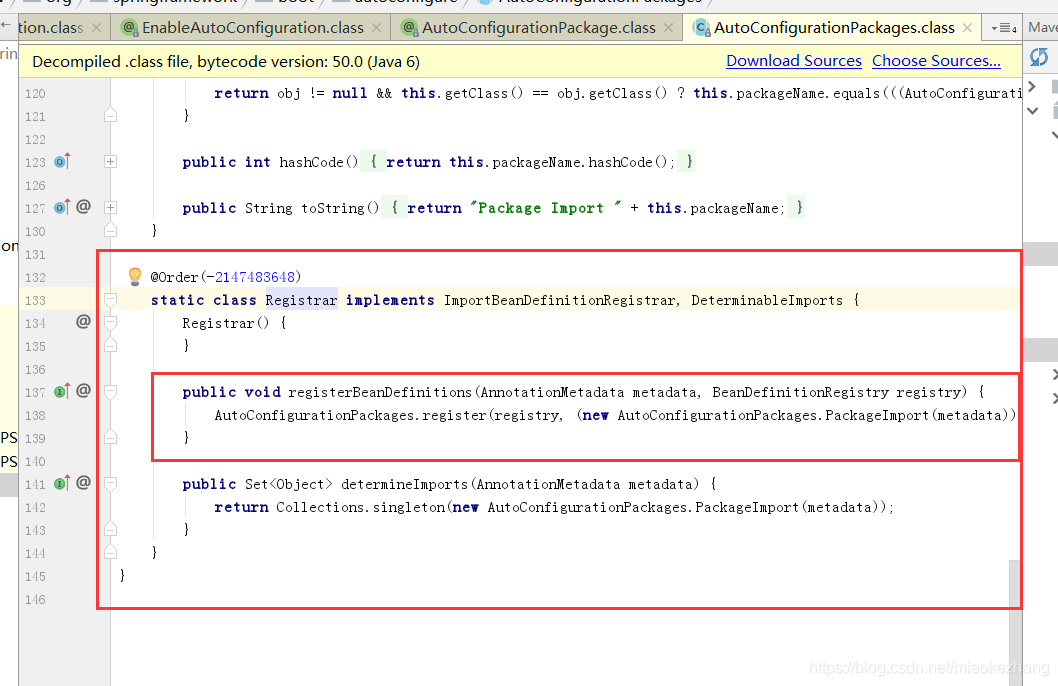
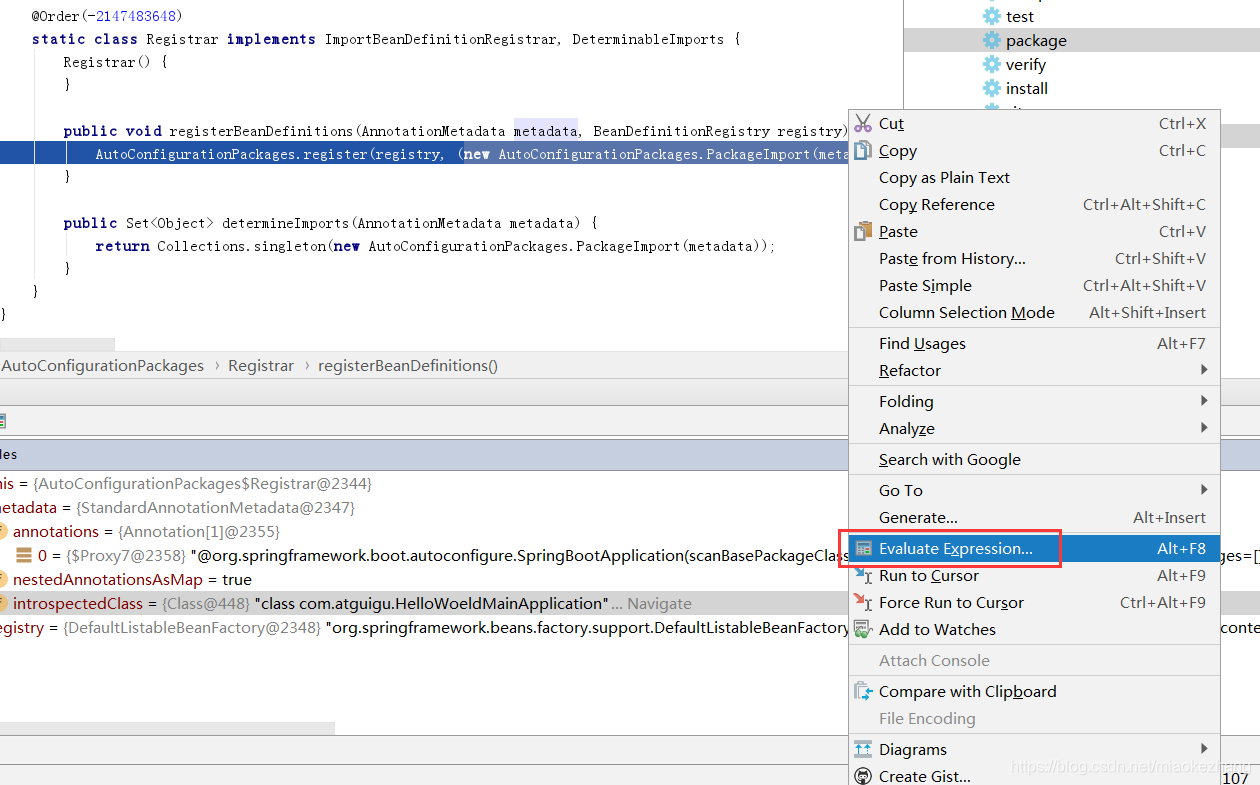
里面的registerBeanDefinitions用来注册bean的定义信息,就是给容器导组件,参数包含了原数据(注解和xml都是一种原数据,即解释数据的数据,这就是所谓的配置),方法里执行了new AutoConfigurationPackages.PackageImport(metadata),获取到元数据的包信息,给方法打断点进行调试:
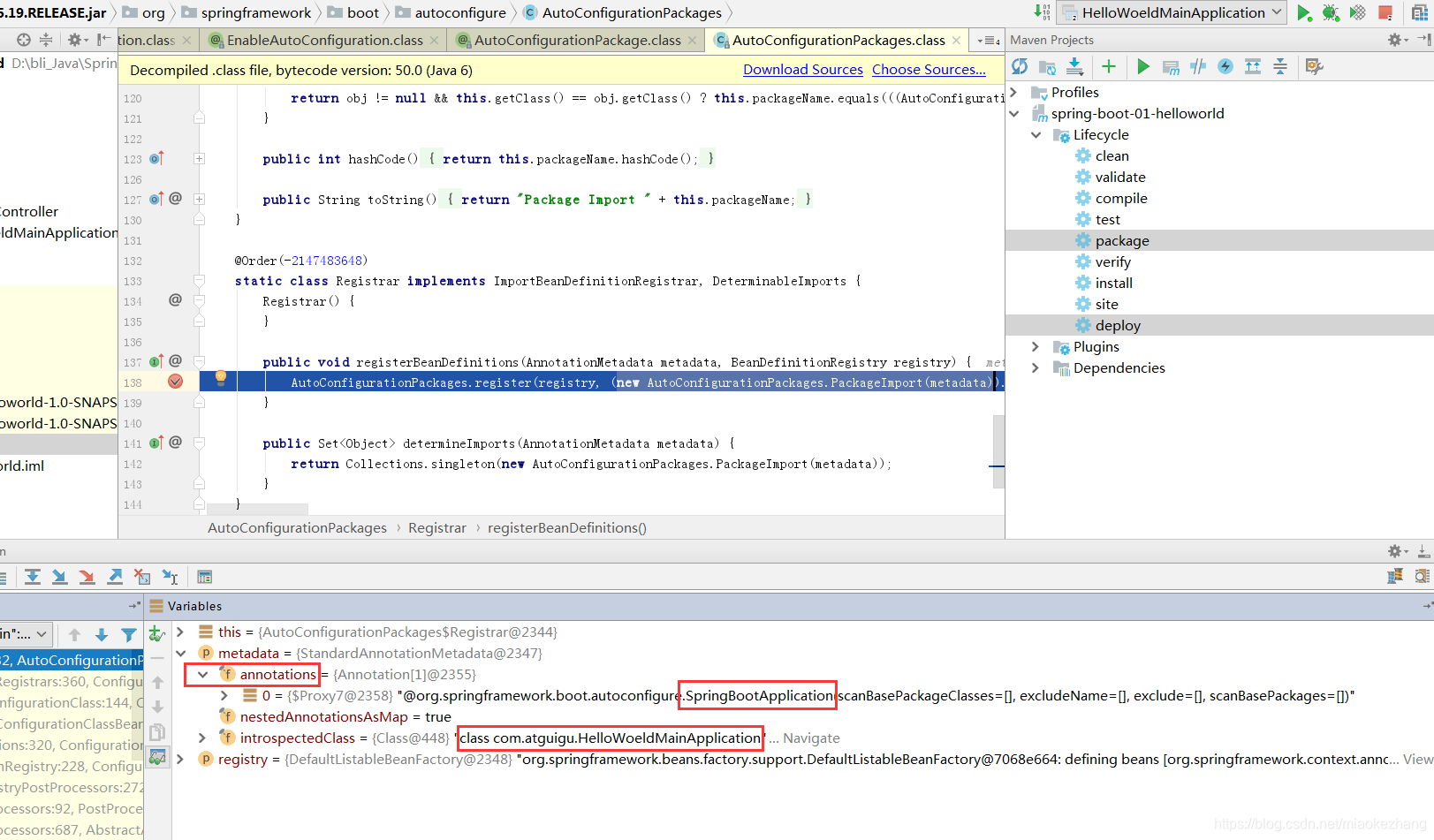
元数据里的注解是SpringBootApplication,标注了com.atguigu.HelloWoeldMainApplication类,查看此时new AutoConfigurationPackages.PackageImport(metadata)的计算结果:
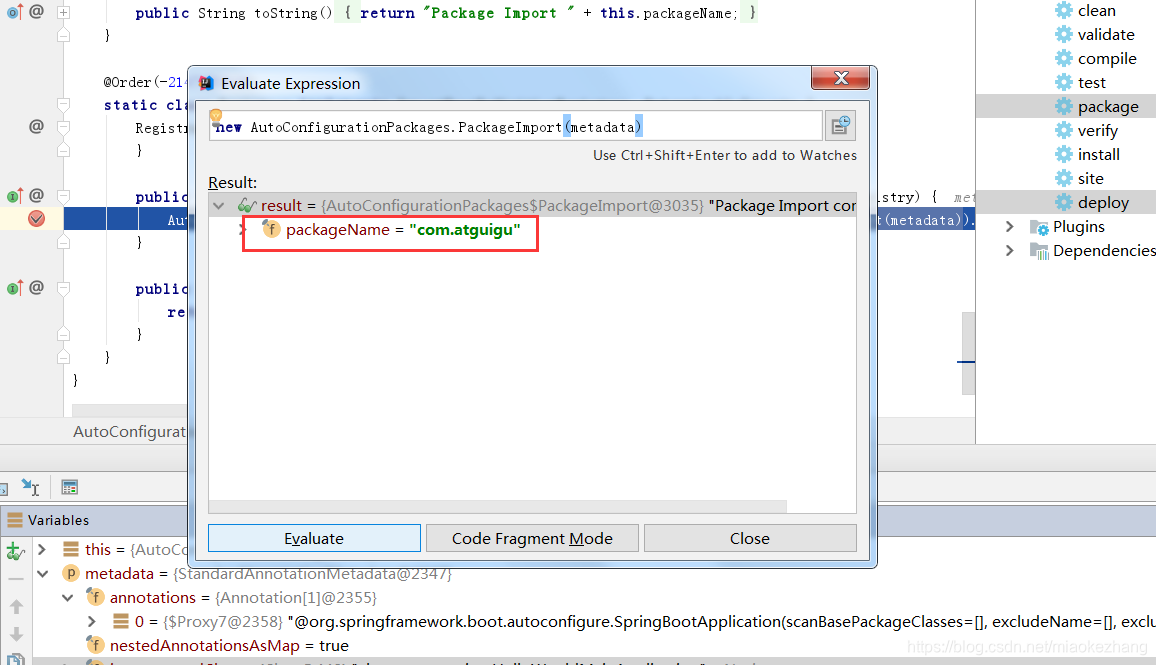
从而得到了com.atguigu的包。至此我们可以理解为将主配置类(@SpringBootApplication标注的类)的所在包以及下面的所有子包里面的所有组件扫描到Spring容器。
@Import({EnableAutoConfigurationImportSelector.class}),导入组件的选择器,将所有需要导入的组件以全类名的方式返回,这些组件就会被添加到容器中,点进去,找到响应的父类:
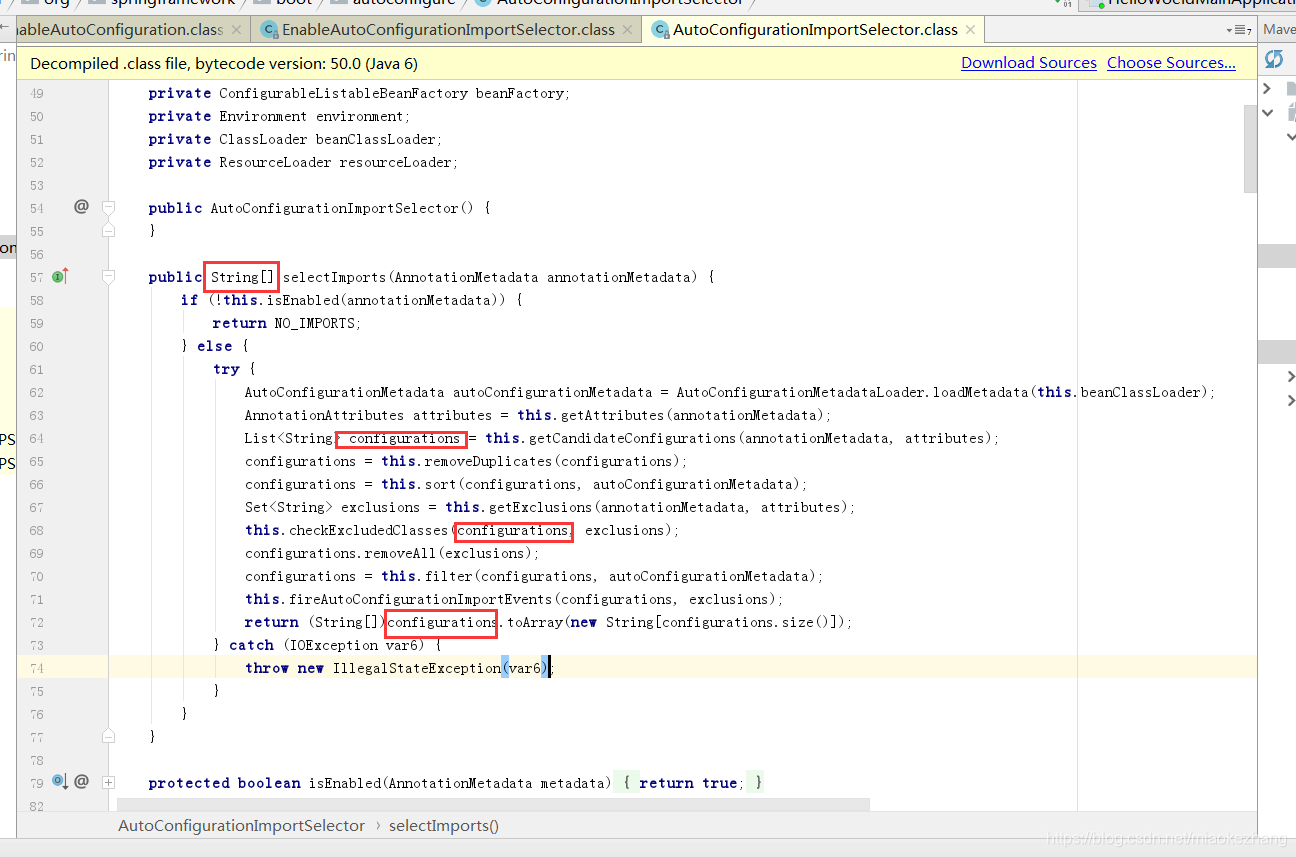
我们进行调试:
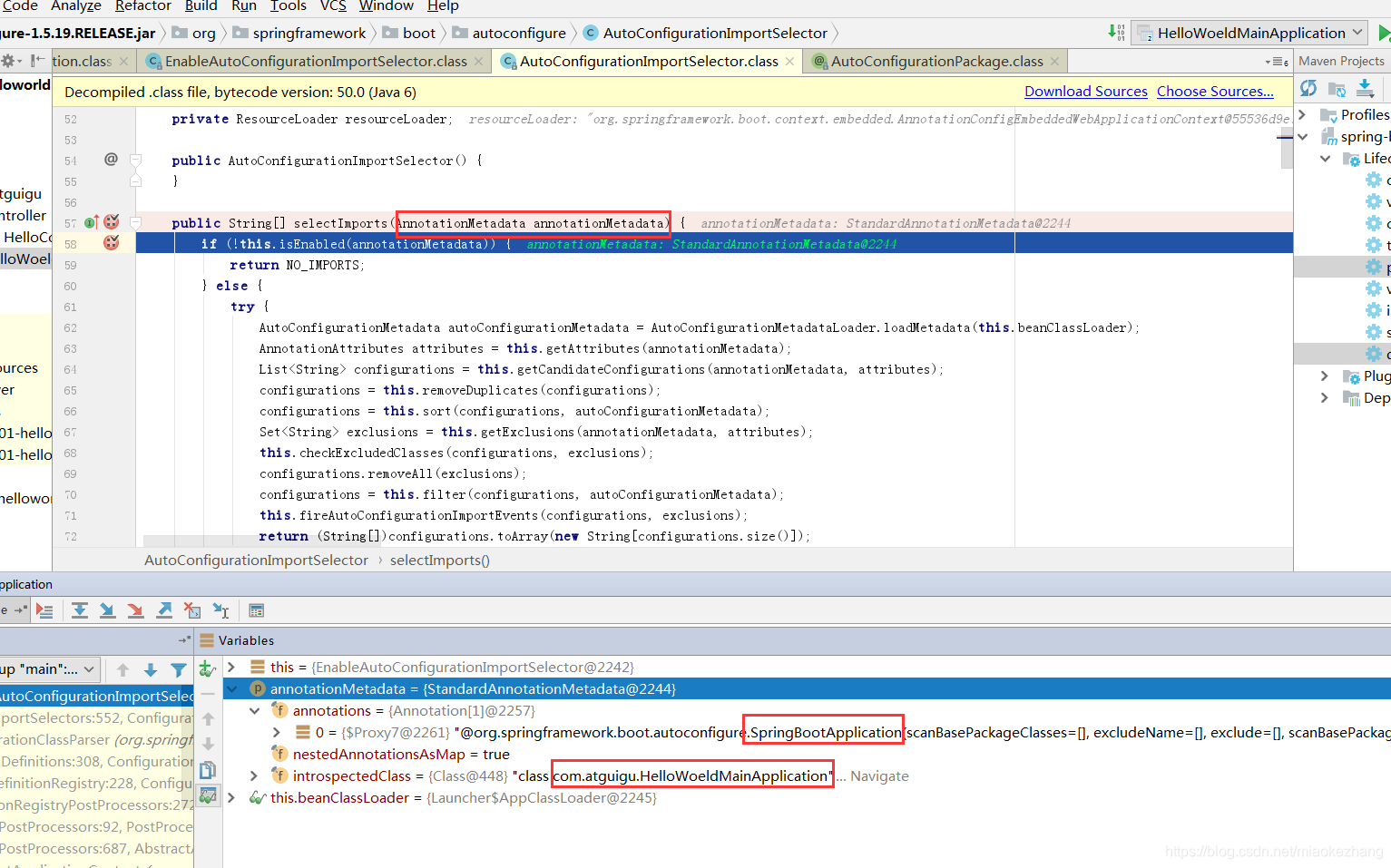
元数据还是那个元数据,@SpringBootApplicatoin,对应的class还是那个类,com.atguigu.HelloWoeldMainApplicatoin,继续往下执行,可以发现configurations这个变量很重要:
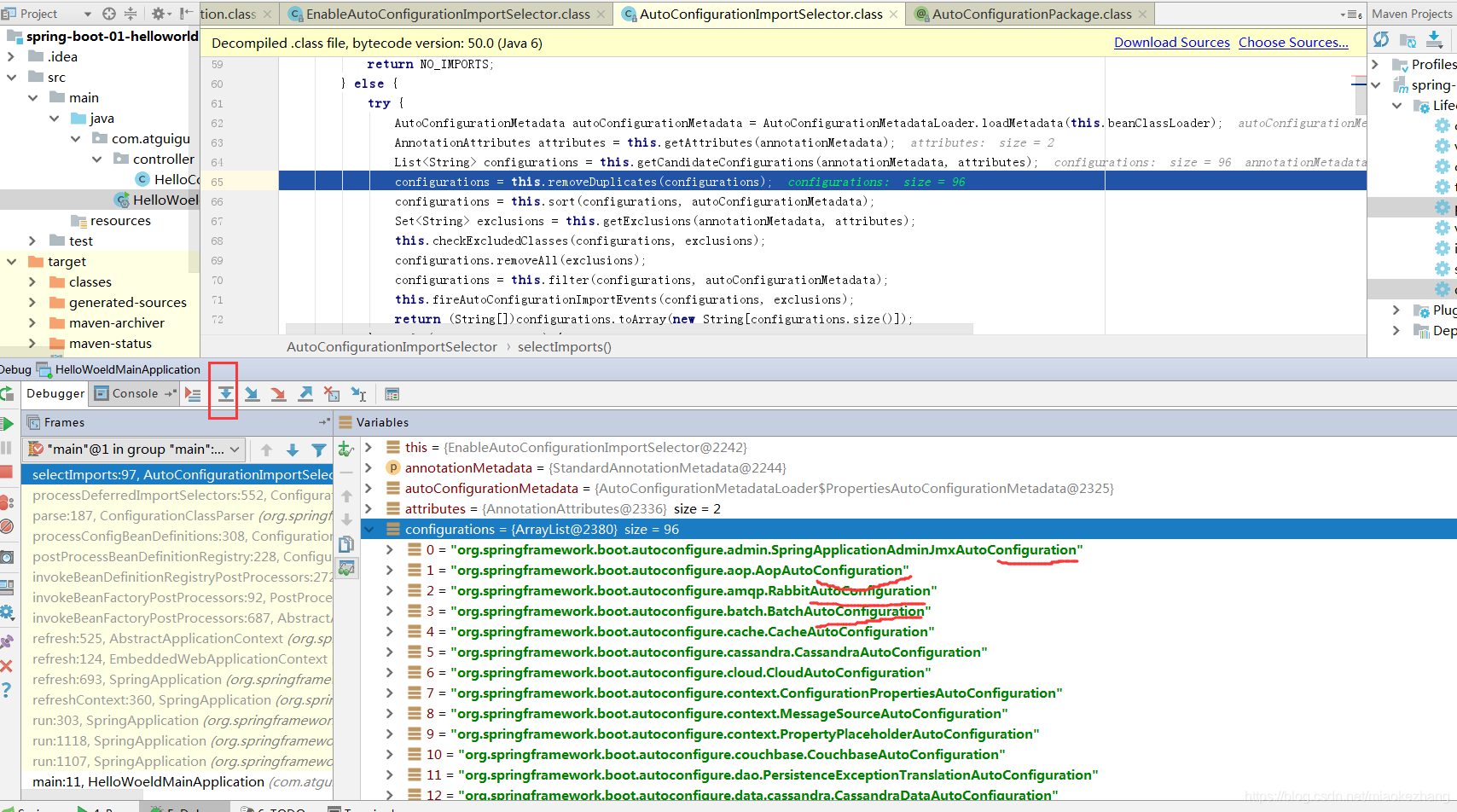
可以发现这个EnableAutoConfigurationImportSelector.class会给容器导入非常多的自动配置类(xxxAutoConfigurart),就是给容器中导入这个场景需要的所有组件,并配置好这个组件。比如aop,batch批处理,mongdb等组件,在这里面都已经自动配置好了。

















 1352
1352

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









