







1 傅里叶变换家族
为什么使用正弦波而不是方波或三角波? 请记住,信号可以通过无数种方式进行分解。分解的目标是最终得到比原始信号更容易处理的东西。例如,脉冲分解允许一次检查一个点的信号,从而产生了强大的卷积技术。分量正弦波和余弦波比原始信号更简单,因为它们具有原始信号所没有的特性:正弦保真度。系统的正弦输入保证产生正弦输出。只有信号的幅度和相位可以改变;频率和波形必须保持不变。正弦波是唯一具有这种有用特性的波形。虽然正方形和三角形分解是可能的,但它们没有普遍有用的理由。
一般术语:傅里叶变换,可以分为四类,由可能遇到的四种基本类型的信号产生。
信号可以是连续的,也可以是离散的,可以是周期性的,也可以是非周期性的。这两个特征的组合产生了四个类别,如下所述,如图 8-2 所示。
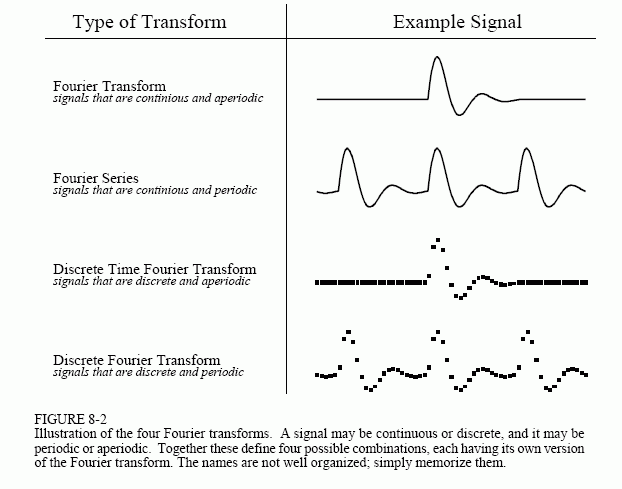
信号可以是连续的,也可以是离散的,可以是周期性的,也可以是非周期性的。这两个特征的组合产生了四个类别,如下所述,如图 8-2 所示。
- 非周期性-连续性:包括衰减指数和高斯曲线。这些信号延伸到正无穷大和负无穷大,而不会以周期性模式重复。此类信号的傅里叶变换简称为傅里叶变换。
- 周期性-连续性:包括:正弦波、方波,以及任何以规则模式从负无穷大到正无穷大重复的波形。这个版本的傅里叶变换称为傅里叶级数。
- 非周期性-离散性:这些信号仅在正无穷大和负无穷大之间的离散点处定义,并且不会以周期性的方式重复。这种类型的傅里叶变换称为离散时间傅里叶变换。
- 周期性-离散性:这些是离散信号,以周期性的方式从负无穷大到正无穷大重复。这类傅里叶变换有时称为离散傅里叶级数,但通常称为离散傅里叶变换。
这四类信号都延伸到正无穷大和负无穷大。如果计算机中只存储了有限数量的样本,例如由 1024 个点形成的信号,该怎么办?难道没有使用有限长度信号的傅里叶变换版本吗?不,没有。正弦波和余弦波被定义为从负无穷大延伸到正无穷大。不能使用一组无限长的信号来合成长度有限的信号。解决这个难题的方法是使有限数据看起来像一个无限长的信号。这是通过想象信号在实际点的左侧和右侧有无限数量的样本来完成的。如果所有这些虚数样本的值都为零,则信号看起来是离散的和非周期性的,并且应用离散时间傅里叶变换。作为替代方案,假想样本可以是实际 1024 点的重复。在这种情况下,信号看起来是离散的和周期性的,周期为 1024 个样本。这就需要使用离散傅里叶变换。
事实证明,合成非周期性信号需要无限数量的正弦波。这使得在计算机算法中无法计算离散时间傅里叶变换。通过消除,唯一可在 DSP 中使用的傅里叶变换类型是 DFT。换句话说,数字计算机只能处理离散且长度有限的信息。
四个傅里叶变换中的每一个都可以细分为实数和复数版本。实数是最简单的,使用普通数和代数进行合成和分解。
数学术语:变换,广泛应用于数字信号处理,如:傅里叶变换、拉普拉斯变换、Z变换、希尔伯特变换、离散余弦变换等。什么是变换?要回答这个问题,请记住什么是函数。 函数是将一个值更改为另一个值的算法或过程。 例如,y=2x+1 是一个函数。为 x 选择一些值,将其代入等式中,然后弹出一个 y 值。函数还可以将多个值更改为单个值,例如:y=2a+3b+4c,其中 a、b 和 c 变换为 y。
变换是它的直接扩展,允许输入和输出具有多个值。假设有一个由 100 个样本组成的信号。如果设计了一些方程式、算法或程序,将这 100 个样本变成另外 100 个样本,就有了变换。转换不限于任何特定类型或数量的数据。例如,输入可能有 100 个离散数据样本,输出可能有 200 个离散数据样本。同样,输入可能有一个连续信号,输出可能有一个连续信号。混合信号也是允许的,离散输入和连续输出,反之亦然。简而言之,转换是将一个数据块更改为另一个数据块的任何固定过程。
2 真实 DFT 的符号和格式
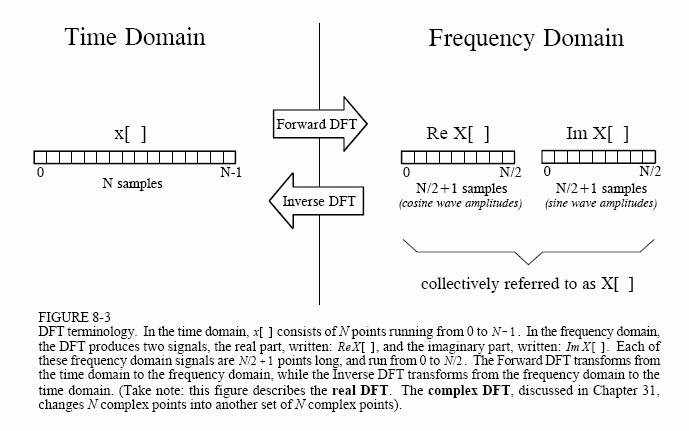
如图 8-3 所示,离散傅里叶变换将 N 点输入信号转换为两点输出信号。输入信号包含被分解的信号,而两个输出信号包含分量正弦波和余弦波的幅度。输入信号被称为时域信号。这是因为进入DFT的最常见信号类型由以下部分定期采集样本组成。
当然,任何类型的采样数据都可以输入到DFT中。当在傅里叶分析中看到术语“时域”时,它实际上可能是指随时间推移采集的样本,也可能是指正在分解的任何离散信号的一般参考。术语频域用于描述正弦波和余弦波的振幅。
频域包含与时域完全相同的信息,只是形式不同。如果知道一个域,可以计算另一个域:
- 给定时域信号,计算频域的过程称为分解、分析、前向 DFT 或简称为 DFT。
- 如果知道频域,则时域的计算称为合成,或逆 DFT。
- 综合和分析都可以用方程形式和计算机算法来表示。
时域中的样本数通常由变量 N 表示。虽然 N 可以是任何正整数,但通常选择 2 的幂,即 128、256、512、1024 等。这有两个原因:
- 首先,数字数据存储使用二进制寻址,使 2 的幂成为自然信号长度。
- 其次,计算 DFT 的最有效算法是快速傅里叶变换 (FFT),通常以 N 次幂为 2 的幂运行。通常,N 在 32 和 4096 之间选择。在大多数情况下,样本从 0 到 N-1,而不是从 1 到 N。
标准 DSP 表示法使用小写字母来表示时域信号,例如 x[], y[] 和 z[]。对应的大写字母用于表示它们的频域,即 X[]、Y[] 和 Z[]。
为了说明这一点,假设 n 点时域信号包含在 x[n] 中。该信号的频域称为 X[],由两部分组成,每部分都是 N/2+1 个样本的阵列。X[] 的实部,写成:ReX[];X[] 的虚部,写成:ImX[]。ReX[] 中的值是余弦波的振幅,而 ImX[] 中的值是正弦波的振幅。正如时域从 x[n] 到 x[N-1] 一样,频域信号从 ReX[0] 到 ReX[N/2],从 ImX[0] 到 ImX[N/2]。仔细研究这些符号;它们对于理解 DSP 中的方程式至关重要。
实数部分和虚数部分的名称起源于复杂的 DFT,它们用于区分实数和虚数。真正的DFT不需要如此复杂。简单地认为 “实部”是指余弦波振幅,而 “虚部”是指正弦波振幅。
同样,不要被频域信号的长度所误导。在 DSP 文献中,经常可以看到这样的陈述:“DFT 将 N 点时域信号更改为 N 点频域信号。这指的是复数 DFT,其中每个“点”都是一个复数(由实数和虚数部分组成)。
3 频域的自变量
图 8-4 显示了 N=128 的 DFT 示例。时域信号包含在数组中:x[0] 到 x[127]。频域信号包含在两个阵列中:ReX[0] 到 ReX[64] 和 ImX[0] 到 ImX[64]。请注意,时域中的 128 个点对应于每个频域信号中的 65 个点,频率指数从 0 到 64。也就是说,时域中的 N 点对应于频域中的 N/2+1 点(不是 N/2 点)。忘记这个额外的点是 DFT 程序中的常见错误。
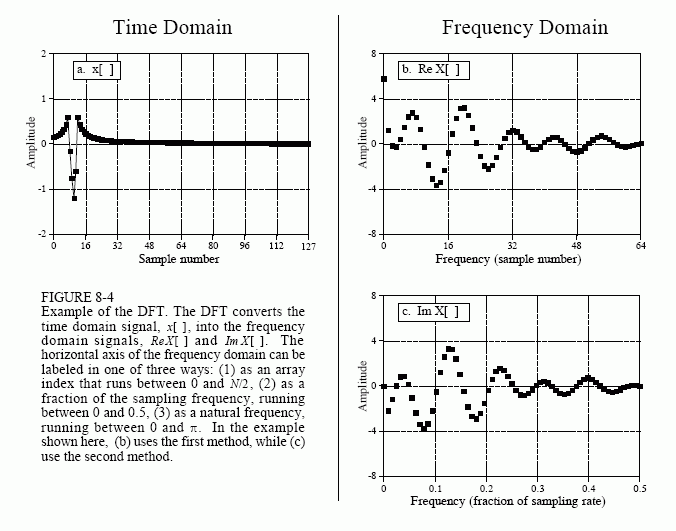
频域的水平轴可以用四种不同的方式来指代,这些方式在DSP中都很常见。
在第一种方法中,水平轴标记为 0 到 64,对应于数组中的 0 到 N/2 样本。使用此标记时,频域的索引为整数,例如 ReX[k] 和 ImX[k],其中 k 以 1 的步长从 0 到 N/2。图 8-4b 中使用了此符号。
在第二种方法(c)中使用,水平轴被标记为采样率的分数。这意味着沿水平轴的值始终在 0 到 0.5 之间,因为离散数据只能包含 DC 和采样率一半的频率。与此表示法一起使用的索引是 f,表示频率。实部和虚部被写入:ReX[f] 和 ImX[f],其中采用 N/2+1 等距值,介于 0 到 0.5 之间。要从第一个符号 k 转换为第二个符号,请将水平轴除以 N。也就是说,f= k/N。本书中的大多数图表都使用第二种方法,强调离散信号仅包含采样率的 0 到 0.5 之间的频率。
第三种样式与第二种样式相似,只是水平轴乘以 2π。此标签使用的索引是 ω。在这种表示法中,写实部和虚部:ReX[ω] 和 ImX[ω],其中 ω 取 N/2+1 个介于 0 和 π 之间的等距值。参数 ω 称为固有频率,单位为弧度。这是基于一个圆中有 2π 弧度的想法。例如,考虑余弦波是如何用前三种符号来书写的:使用 k:c[n]=cos(2πkn/N)、使用 f:c[n]=cos(2πfn) 和使用 ω:c[n]=cos(ωn)。
第四种方法是根据特定应用中使用的模拟频率来标记水平轴。例如,如果被检查的系统的采样率为 10 kHz(即每秒 10,000 个样本),则频域图将在 0 到 5 kHz 之间运行。这种方法的优点是以现实世界的意义来呈现频率数据。缺点是它与特定的采样率相关联,因此不适用于一般的DSP算法开发,例如设计数字滤波器。
4 DFT 基函数
DFT 中使用的正弦波和余弦波通常称为 DFT 基函数。换句话说,DFT的输出是一组表示振幅的数字。基函数是一组具有统一振幅的正弦波和余弦波。如果将每个幅度(频域)分配给适当的正弦波或余弦波(基函数),则结果是一组缩放的正弦波和余弦波,可以将它们相加以形成时域信号。
DFT 基函数由以下方程生成:
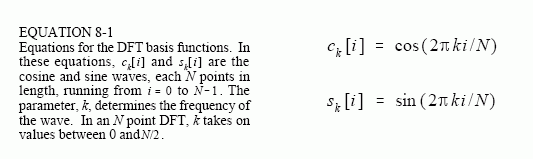
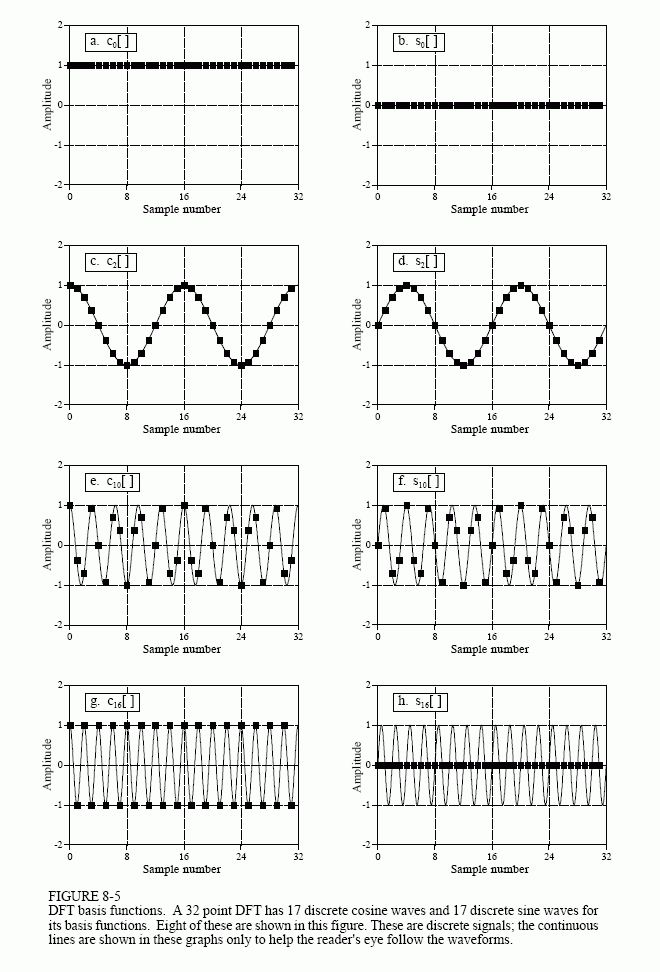
其中: c k [ ] c_k[] ck[] 是 ReX[k] 中保持的振幅的余弦波, s k [ ] s_k[] sk[] 是 ImX[k] 中保持的振幅的正弦波。例如,图 8-5 显示了 N=32 点 DFT 中使用的 17 个正弦波和 17 个余弦波中的一些。由于这些正弦曲线相加形成输入信号,因此它们的长度必须与输入信号相同。在本例中,每个点有 32 个点,从 i=0 到 31。参数 k 设置每个正弦波的频率。特别是, c 1 [ ] c_1[] c1[] 是在 N 个点上做一个完整周期的余弦波, c 15 [ ] c_{15}[] c15[] 是在 N 个点上做五个完整周期的余弦波,以此类推。这是理解基函数的一个重要概念;频率参数 k 等于在信号的 N 个点上发生的完整周期数。
详细看下其中的几个基函数。图(a)显示了余弦波 c 0 [ ] c_0[] c0[]。这是零频率的余弦波,是 1 的常数值。这意味着 ReX[0] 保存时域信号中所有点的平均值。在电子学中,可以说 ReX[0] 保持直流偏移。零频率的正弦波 s 0 [ ] s_0[] s0[] 如(b)所示,这是一个由所有零组成的信号。由于这不会影响正在合成的时域信号,因此 ImX[0] 的值无关紧要,并且始终设置为零。
图(c)和(d)显示了 c 2 [ ] c_2[] c2[] 和 s 2 [ ] s_2[] s2[],在 N 点上完成两个周期的正弦曲线。它们分别对应于 ReX[2] 和 ImX[2]。同样,(e)和(f)显示 c 10 [ ] c_{10}[] c10[] 和 s 10 [ ] s_{10}[] s10[],在 N 个点上完成十个周期的正弦曲线。这些正弦曲线对应于ReX[10]和ImX[10]中的振幅。问题是,(e)和(f)中的样本不再看起来像正弦波和余弦波。如果这些图形中没有连续曲线,甚至很难检测波形的模式。从数学的角度来看,这些样本确实会形成离散的正弦曲线,即使眼睛无法遵循这种模式。
基函数中的最高频率显示在(g)和(h)中。它们是 c N / 2 [ ] c_{N/2}[] cN/2[] 和 s N / 2 [ ] s_{N/2}[] sN/2[] ,或者在这个例子中是 c 16 [ ] c_{16}[] c16[] 和 s 16 [ ] s_{16}[] s16[]。离散余弦波的值在 1 和 -1 之间交替,这可以解释为在峰值处对连续正弦波进行采样。相反,离散正弦波包含所有零点,这是在过零点处采样的结果。这使得 ImX[N/2] 的值与 ImX[0] 相同,始终等于零,并且不影响时域信号的合成。
这里有一个难题:如果有 N 个样本进入 DFT,而 N+2 个样本退出,那么**额外的信息从何而来?**答案是:其中两个输出样本不包含任何信息,允许其他 N 个样本完全独立。不携带任何信息的点是 ImX[0] 和 ImX[N/2],这两个样本的值始终为零。
5 合成,计算逆DFT
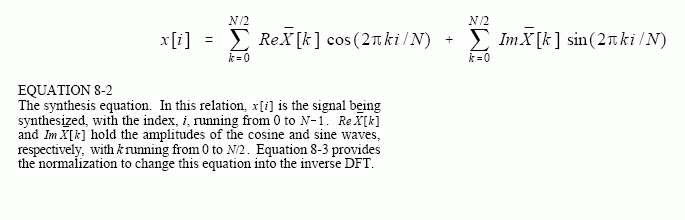
把到目前为止所说的一切放在一起,可以写出综合方程:
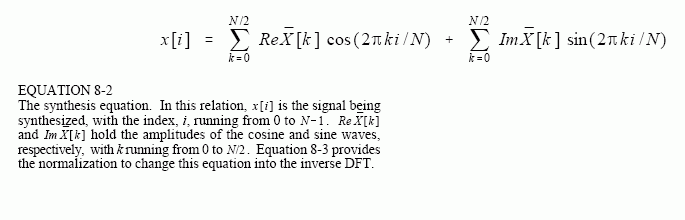
换句话说,任何 N 点信号 x[i] 都可以通过添加 N/2+1 余弦波和 N/2+1 正弦波来创建。余弦波和正弦波的振幅分别保存在阵列 I m X [ k ] ˉ Im\bar{X[k]} ImX[k]ˉ 和 R e X [ k ] ˉ Re\bar{X[k]} ReX[k]ˉ 中。综合方程将这些振幅乘以基函数,以创建一组缩放的正弦波和余弦波。将缩放的正弦波和余弦波相加会产生时域信号 x[i]。
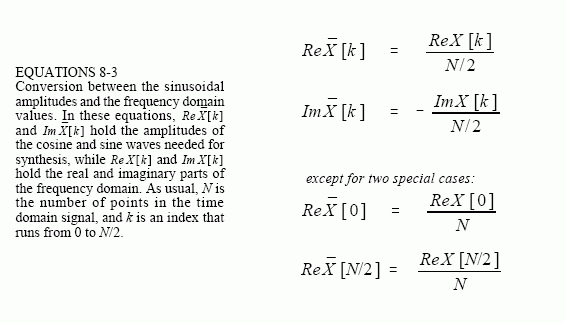
在方程 8-2 中,数组称为 I m X [ k ] ˉ Im\bar{X[k]} ImX[k]ˉ 和 R e X [ k ] ˉ Re\bar{X[k]} ReX[k]ˉ,而不是 I m X [ k ] ˉ Im\bar{X[k]} ImX[k]ˉ 和 ReX[k]。这是因为合成所需的幅度(在本次讨论中称为: I m X [ k ] ˉ Im\bar{X[k]} ImX[k]ˉ 和 R e X [ k ] ˉ Re\bar{X[k]} ReX[k]ˉ)与信号的频域(用 ImX[k] 和 ReX[k] 表示)略有不同。这就是之前提到的比例因子问题。虽然转换只是一个简单的归一化,但它是计算机程序中的常见错误。在方程形式中,两者之间的转换由下式给出:
假设你得到一个频域表示,并要求你合成相应的时域信号。首先,必须找到正弦波和余弦波的振幅。换句话说,给定 ImX[k] 和 ReX[k],必须找到 I m X [ k ] ˉ Im\bar{X[k]} ImX[k]ˉ 和 R e X [ k ] ˉ Re\bar{X[k]} ReX[k]ˉ。等式 8-3 以数学形式显示了这一点。要在计算机程序中执行此操作,必须执行三个操作:
- 首先,将频域中的所有值除以 N/2。
- 其次,更改所有虚值的符号。
- 第三,将实数部分 ReX[0] 和 ReX[N/2] 中的第一个和最后一个样本除以 2。这提供了方程 8-2 所述的合成所需的振幅。8-2 和 8-3 定义了逆 DFT。
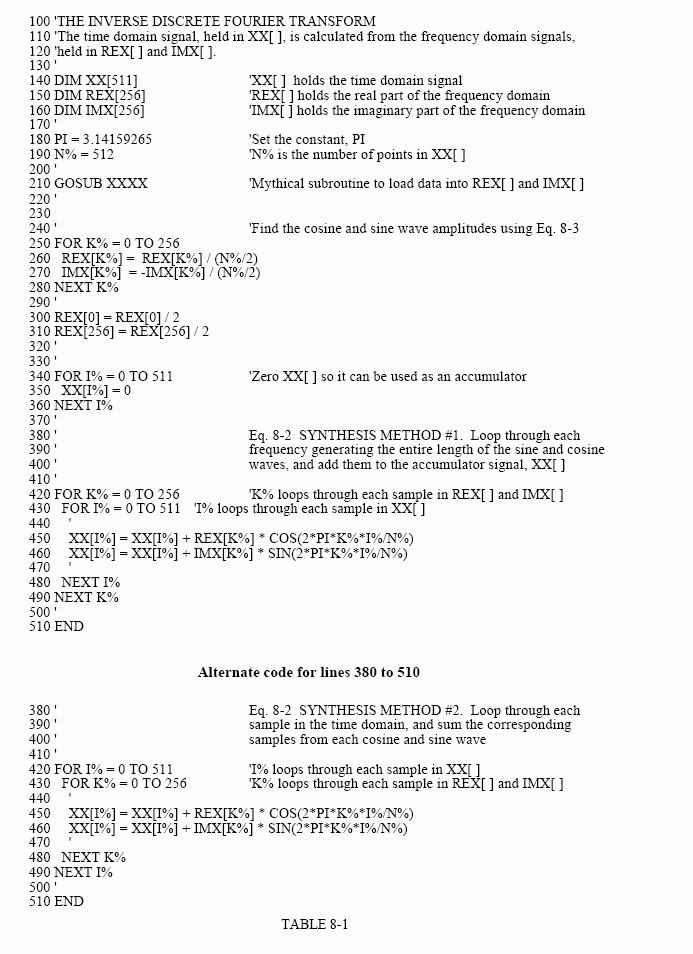
整个逆 DFT 显示在表 8-1 中列出的计算机程序中。有两种方法可以对综合(方程 8-2)进行编程,并且都显示了这两种方法:
- 在第一种方法中,每次生成一个缩放的正弦曲线,并将其添加到累加数组中,最终成为时域信号。
- 在第二种方法中,时域信号中的每个样本一次计算一个,作为所有余弦波和正弦波中的相应样本。
这两种方法产生相同的结果。这两个程序之间的差异非常小;在合成过程中,内环和外环互换。
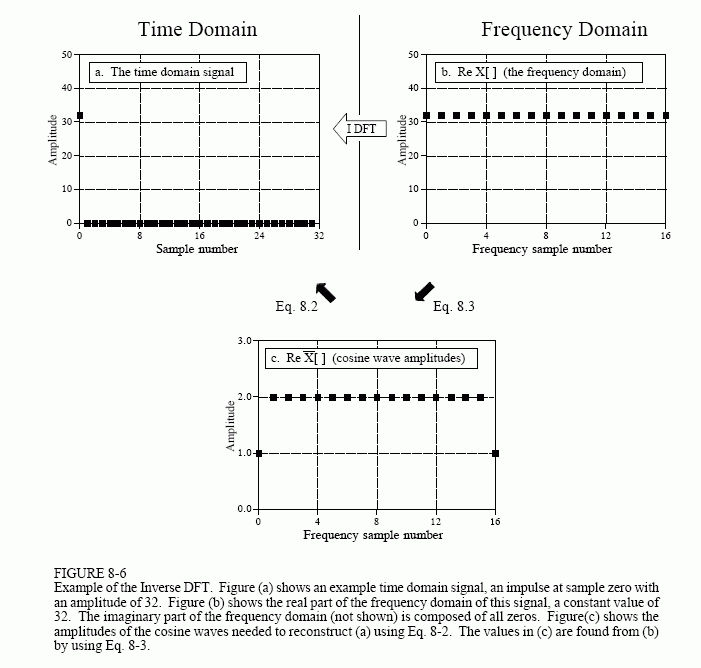
图 8-6 说明了反向 DFT 的操作,以及频域和合成所需幅度之间的细微差异。图8-6a是希望合成的示例信号,样本零点处的脉冲振幅为32。图8-6b显示了该信号的频域表示。频域的实部是常数值 32。虚部(未显示)由所有零组成。时域中的脉冲对应于频域中的恒定值。目前,重要的一点是(b)是(a)的 DFT,而(a)是(b)的逆 DFT。
公式 8-3 用于将频域信号(b)转换为余弦波©的幅度。如图所示,除了样本 0 和 16 的值为 1 之外,所有余弦波的振幅均为 2。本例中未显示正弦波的振幅,因为它们的值为零,因此没有贡献。然后使用合成方程 8-2 将余弦波的幅度(b)转换为时域信号(a)。
这描述了频域与正弦振幅的不同之处,但不能解释为什么它不同。之所以出现这种差异,是因为频域被定义为频谱密度。图 8-7 显示了其工作原理。此图中的示例是 32 点信号的频域的实部。样本从 0 到 16,代表 17 个频率,在采样率的 0 到 1/2 之间等距。频谱密度描述了每单位带宽存在多少信号(幅度)。要将正弦振幅转换为频谱密度,请将每个振幅除以每个振幅所表示的带宽。这就引出了下一个问题:如何确定频域中每个离散频率的带宽?
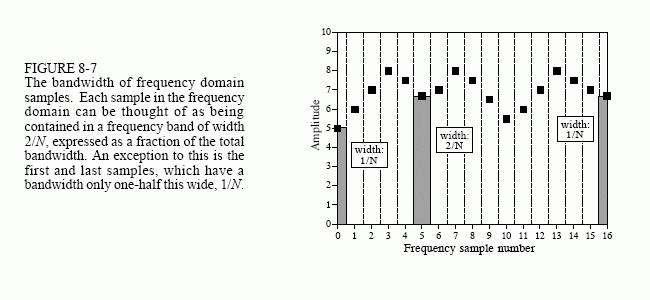
如图所示,可以通过在样本之间绘制分隔线来定义带宽。例如,样本编号 5 出现在 4.5 和 5.5 之间的波段内;样本数 6 出现在 5.5 和 6.5 之间的波段,依此类推。表示为总带宽的分数(即),每个样本的带宽为 2/N。例外情况是两端的样本,其带宽只有此带宽的一半。这考虑了正弦振幅和频域之间的比例因子,以及第一个和最后一个样本所需的额外因子 2。
**为什么要否定虚的部分?**这样做只是为了使真正的 DFT 与其老大哥、复杂的 DFT 保持一致。
6 分析,计算DFT
DFT可以通过三种完全不同的方式计算:
- 首先,这个问题可以作为一组联立方程来处理。这种方法对于理解DFT很有用,但效率太低,无法实际使用。
- 第二种方法:相关性。这是基于检测另一个信号中的已知波形。
- 第三种方法称为快速傅里叶变换 (FFT),是一种巧妙的算法,它将具有 N 个点的 DFT 分解为 N 个 DFT,每个 DFT 只有一个点。FFT 通常比其他方法快数百倍。
所有这三种方法都会产生相同的输出。**应该使用哪个?**在实际操作中,如果 DFT 小于约 32 个点,则相关性是首选技术,否则使用 FFT。
6.1 DFT由联立方程组计算
按以下方式考虑 DFT 计算。系统会从时域中提供 N 个值,并要求计算频域的 N 个值。基本代数提供了答案:要求解 N 个未知数,必须能够写出 N 个线性独立方程。为此,请从每个正弦曲线中取第一个样本并将它们相加。总和必须等于时域信号中的第一个样本,从而提供第一个方程。
同样,可以为时域信号中的每个剩余点编写一个方程,从而产生所需的 N 个方程。然后,可以使用已建立的求解联立方程的方法(例如高斯消元法)找到解决方案。它说明了为什么可以将信号分解为正弦波,需要多少个正弦波,以及基函数必须是线性独立的。
6.2 通过相关性进行DFT
假设试图计算 64 点信号的 DFT。这意味着需要计算实部的 33 个点,以及频域虚部的 33 个点。在这个例子中,只展示如何计算单个样本ImX[3],即在0点和63点之间形成三个完整周期的正弦波的振幅。所有其他频域值都以类似的方式计算。
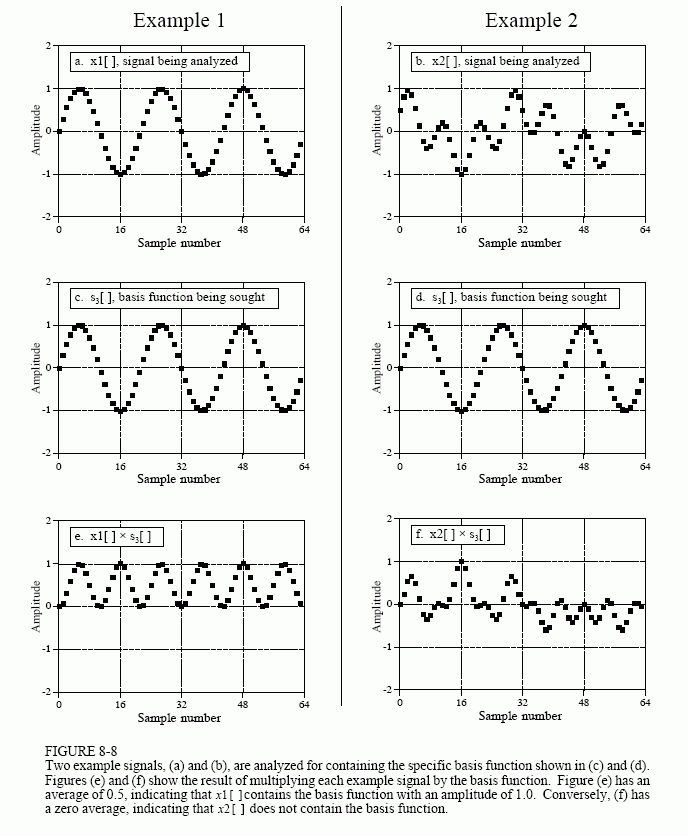
图 8-8 说明了使用相关性计算 ImX[3]。图(a)和(b)显示了两个示例时域信号,分别称为:x1[]和x2[]。第一个信号 x1[] 仅由一个正弦波组成,该正弦波在点 0 和 63 之间产生三个周期。相比之下,x2[] 由几个正弦波和余弦波组成,它们都没有在点 0 和 63 之间产生三个周期。这两个信号说明了计算ImX[3]的算法必须做什么。当输入 x1[] 时,算法必须产生一个值 32,即信号中存在的正弦波的幅度(由方程 8-3 的比例因子修改)。相比之下,当算法馈送到另一个信号 x2[] 时,必须产生一个值为零,表明该信号中不存在该特定正弦波。
要检测另一个信号中包含的已知波形,请将两者相乘,并将点相加。此过程产生的单个数字是衡量两个信号相似程度的指标。图 8-8 演示了此方法。图©和(d)都显示了正在寻找的信号,即在样本 0 和 63 之间产生 3 个周期的正弦波。图(e)显示了(a)和©相乘的结果。同样,(f)显示了将(b)和(d)相乘的结果。(e)中所有点的总和为 32,而(f)中所有点的总和为零,表明已经找到了所需的算法。
频域中的其他样本以相同的方式计算。此过程在分析方程中正式化,分析方程是从时域计算频域的数学方法:
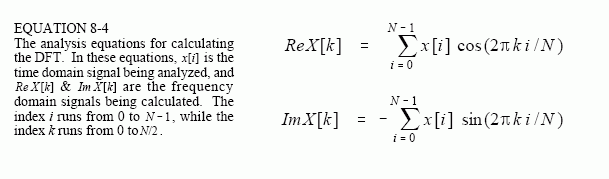
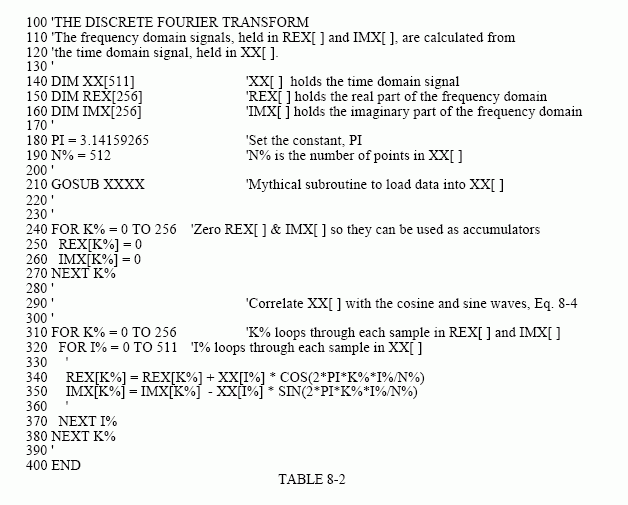
换句话说,通过将时域信号乘以所寻找的正弦波或余弦波,并将结果点相加来找到频域中的每个样本。表 8-2 显示了以这种方式计算 DFT 的计算机程序。
分析方程不需要像综合方程那样对第一点和最后一点进行特殊处理。然而,在方程 8-4 的虚部中有一个负号。和以前一样,这个负号使实际 DFT 与复数 DFT 一致,并且并不总是包括在内。
为了使这种关联算法起作用,基函数必须具有一个有趣的属性:它们中的每一个都必须与所有其他函数完全不相关。这意味着,如果将任意两个基函数相乘,则所得点的总和将等于零。具有此属性的基函数称为正交函数。许多其他存在正交基函数,包括:方波、三角波、脉冲等。信号可以使用相关性分解为这些其他正交基函数,就像这里使用正弦曲线一样。
如表 8-1 所示,逆 DFT 有两种在计算机程序中实现的方法。这种差异涉及在合成过程中交换内部和外部环路。表 8-2 中的 DFT 程序也可以通过交换第 310 行至第 380 行中的内环和外环来以这种方式更改。(这两种不同的DFT和逆DFT观察方式可以被描述为“输入端”和“输出端”算法,就像卷积一样)。
在编写表 8-2 中的程序时,它描述了频域中的单个样本如何受到时域中所有样本的影响。也就是说,程序连续计算频域中的每个值,而不是作为一个组。当内环和外环交换时,程序会遍历时域中的每个样本,计算该点对频域的贡献。通过将各个时域点的贡献相加,可以找到整个频域。这就引出下一个问题:时域中的单个样本对频域有什么样的贡献?答案包含在傅里叶域的一个有趣的方面,称为对偶性。
7 二重性
综合方程和分析方程(方程 8-2 和 8-4)惊人地相似。为了从一个域移动到另一个域,将已知值乘以基函数,并添加所得乘积。两个方程之间唯一的显着差异是时域是一个 N 点的信号,而频域是两个 N/2 + 1 点的信号。复数DFT将时域和频域都表示为N个点的复数信号。这使得这两个域完全对称,并且在它们之间移动的方程几乎相同。
时域和频域之间的这种对称性称为对偶性,并产生了许多有趣的性质。例如,频域中的单个点对应于时域中的正弦曲线。通过对偶性,时域中的单个点对应于频域中的正弦波。再举一个例子,时域中的卷积对应于频域中的乘法。通过对偶性,频域中的卷积对应于时域中的乘法。
8 极性符号
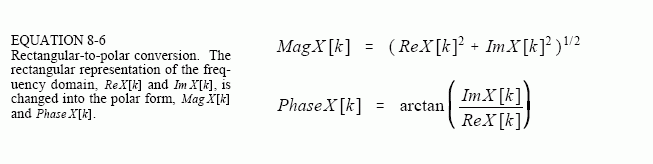
正如目前所描述的,频域是一组余弦波和正弦波的振幅,这称为矩形表示法,或用极性形式表示。在这种表示法中,ReX[] 和 ImX[] 被另外两个数组取代,称为 X[] 的大小,在方程中写为:Mag X[] 和 Phase X[],写为:Phase X[]。幅度和相位是实部和虚部的成对替代。例如,Mag X[0] 和 Phase X[0] 仅使用 ReX[0] 和 ImX[0] 计算。同样,Mag X[14] 和Phase X[14] 仅使用 ReX[14] 和 ImX[14] 计算,依此类推。在方程形式中,这两种表示是相关的:

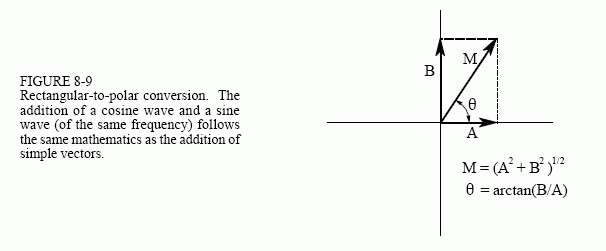
重要的一点是,在此过程中不会丢失任何信息;给定一个表示,以计算另一个表示。换句话说,振幅 A 和 B 中包含的信息也包含在变量 M 和 θ 中。虽然这个方程涉及正弦波和余弦波,但它遵循与简单向量相同的转换方程。图 8-9 显示了如何在直角坐标系中查看两个变量 A 和 B,而 M 和 θ 是极坐标中的参数的类似向量表示。
在极性符号中,Mag X[] 保存余弦波的振幅(方程 8-4 和图 8-9 中的 M),而相位 X[] 保存余弦波的相位角(方程 8-4 和图 8-9 中的 θ)。以下公式将频域从矩形转换为极性表示法,反之亦然:
矩形和极坐标表示法允许以两种不同的方式思考 DFT:
- 使用矩形符号,DFT 将 N 点信号分解为 N/2 + 1 余弦波和 N/2 + 1 正弦波,每个波都有指定的振幅。
- 在极性表示法中,DFT 将 N 点信号分解为 N/2 + 1 余弦波,每个余弦波具有指定的振幅(称为幅度)和相移。
**为什么极性符号使用余弦波而不是正弦波?**正弦波不能表示信号的直流分量,因为零频率的正弦波由所有零组成(见图 8-5 a&b)。
尽管极坐标和矩形表示包含完全相同的信息,但在许多情况下,一个比另一个更容易使用。例如,图 8-10 显示了矩形和极性形式的频域信号。相比之下,极性曲线很简单:只存在低于约0.25的频率,并且相移与频率大致成正比。这是低通滤波器的频率响应。
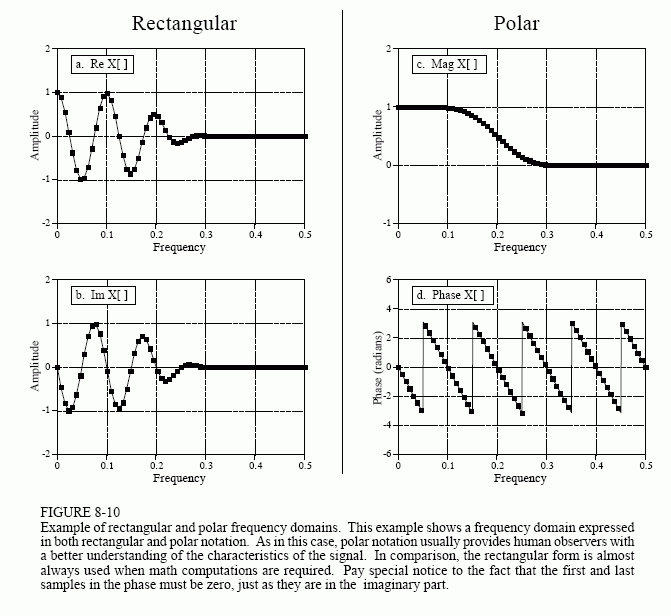
什么时候应该使用矩形表示法,什么时候应该使用极坐标? 矩形表示法通常是计算的最佳选择,例如在方程式和计算机程序中。相比之下,图形几乎总是极化形式。如前面的例子所示,人类几乎不可能通过观察实部和虚部来理解频域信号的特征。在典型的程序中,频域信号保持矩形表示法,直到观察者需要查看它们,此时完成矩形到极性的转换。
为什么极性记数法中的频域更容易理解? 这个问题的核心是为什么将信号分解为正弦曲线是有用的。如果正弦波进入线性系统,输出也将是正弦波,并且频率与输入完全相同。只有振幅和相位可以改变。极性符号直接表示分量余弦波的幅度和相位的信号。反过来,系统可以通过它们如何修改这些余弦波的幅度和相位来表示。
现在考虑一下如果在此方案中使用矩形表示法会发生什么情况。余弦波和正弦波的混合物进入线性系统,导致余弦波和正弦波的混合物离开系统。问题是,输入端的余弦波可能会导致输出端同时产生余弦波和正弦波。同样,输入端的正弦波会导致输出端同时产生余弦波和正弦波。虽然这些交叉项可以理顺,但整体方法与我们最初想要使用正弦曲线的原因不匹配。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









