






 本文介绍了一种基于HED网络的身份证边缘检测方法,并通过霍夫变换直线检测和图像矫正技术实现了身份证图像的精确提取。
本文介绍了一种基于HED网络的身份证边缘检测方法,并通过霍夫变换直线检测和图像矫正技术实现了身份证图像的精确提取。
前言
1.关于边缘检测,我这里用了HED这个边缘检测网络,HED创作于2015年,骨干网络是state-of-the-art的VGG-16,并且使用迁移学习初始化了网络权重。关于HED的算法原理与训练模型代码可以转到github。
2.OpenCV也有好几边缘检测算法可用,就拿最常用的Canny算法来说,对背景复杂一点的图像,手动调参往往是这个场景下边缘很完美的提取出来,当换个有差异的场景,干扰源不一样,要得到好一些的效果,参数阈值又得重新调一遍,如果要做一个能商用的项目,Canny算法是不能完美解决边缘提取的问题。
项目流程
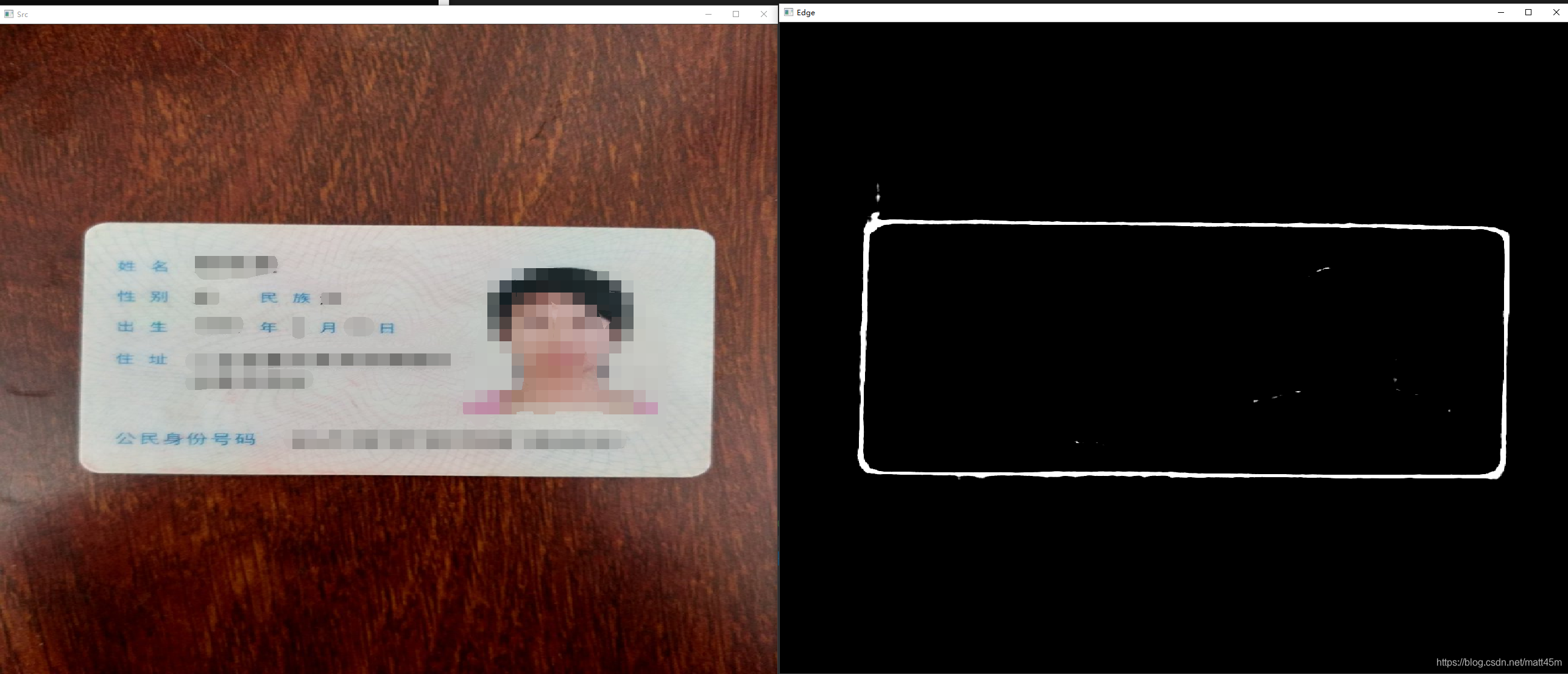
1.先用HED提取身份证边缘。
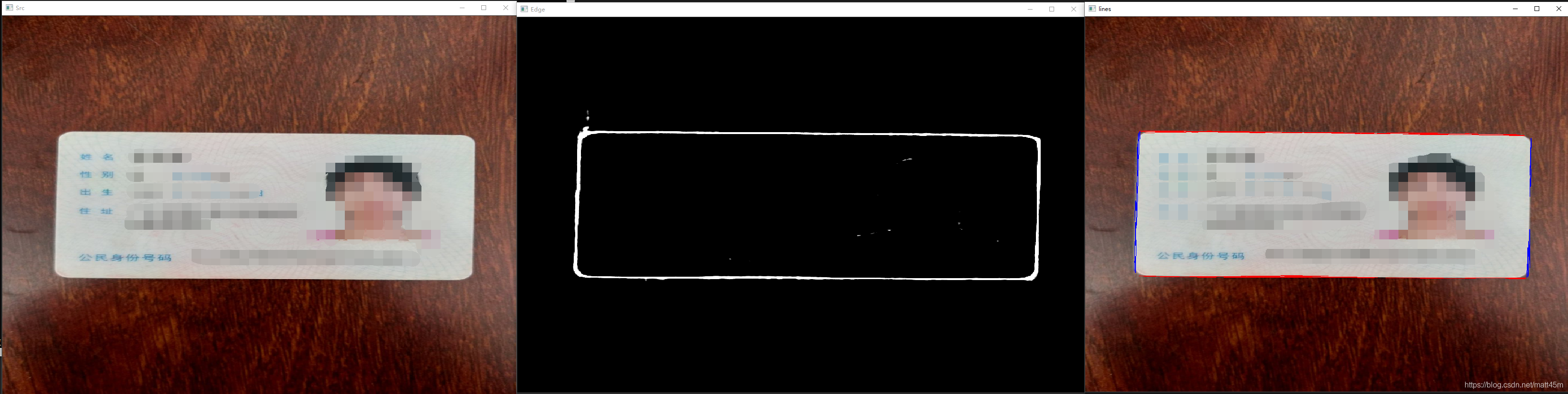
2.用霍夫变换直线检测对边缘图像做直线检测。
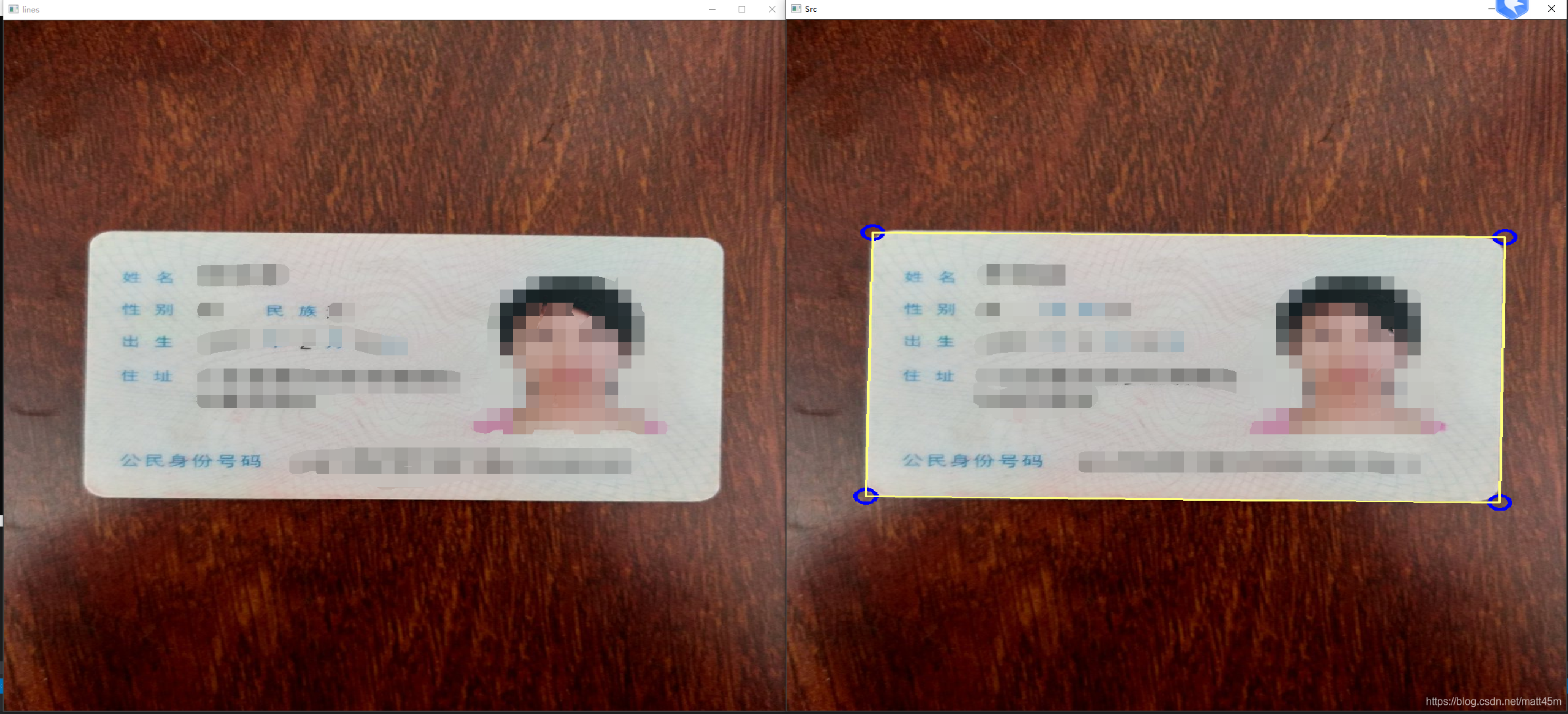
3.对检测到的直线做排序与筛选,得到最终的边缘。
4.找到边缘线的相交点。
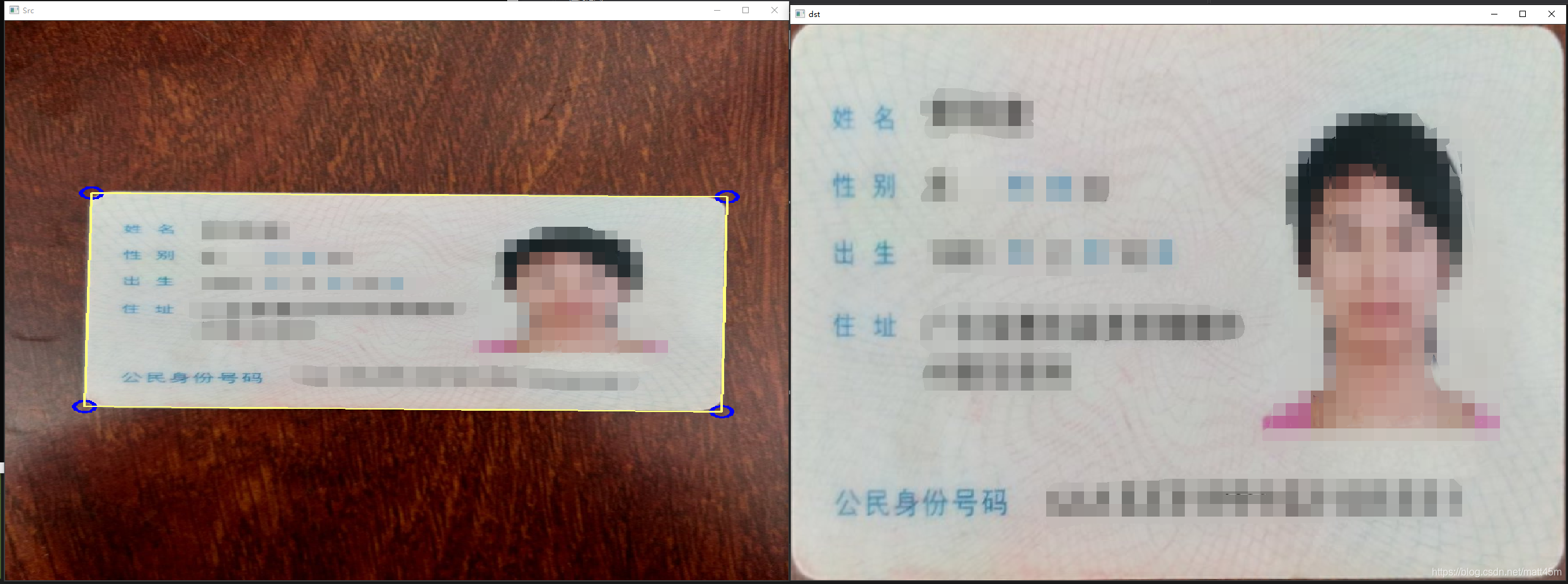
5.以四条线的四个相交点来矫正得到的最终身份证目标。
代码实现
1.使用用OpenCV的DNN来做模型推理,得到最终于的边缘图像。
int hedEdge(cv::dnn::Net& edge_net, cv::Mat& cv_book, cv::Mat& cv_hed)
{
if (cv_book.empty())
{
return -2;
}
cv::Mat cv_gamma;
cv::Size reso(512, 512);
cv::Mat blob = cv::dnn::blobFromImage(cv_book, 1.0 / 255.0, reso, cv::Scalar(0, 0, 0), true, false);
edge_net.setInput(blob);
cv_hed = edge_net.forward();
cv::resize(cv_hed.reshape(1, reso.height), cv_hed, cv_book.size(), cv::INTER_LINEAR);
cv_hed.convertTo(cv_hed, CV_8UC1, 255);
return 0;
}
得到边缘图像:
2.对得到的边缘图像进行直线检测并分出垂直与水平线。
struct Line
{
cv::Point LP1;
cv::Point LP2;
cv::Point LC;
Line(cv::Point p1, cv::Point p2)
{
LP1 = p1;
LP2 = p2;
LC = cv::Point((p1.x + p2.x) / 2, (p1.y + p2.y) / 2);
}
};
void lineDetection(cv::Mat cv_edge,std::vector<Line> &h_lines, std::vector<Line>& v_lines)
{
cv::Mat cv_dilate, cv_erode;
cv::Mat element_e = getStructuringElement(cv::MORPH_RECT, cv::Size(5, 5), cv::Point(-1, -1));
cv::Mat element_d = getStructuringElement(cv::MORPH_RECT, cv::Size(3, 3), cv::Point(-1, -1));
cv::erode(cv_edge, cv_erode, element_e);
cv::dilate(cv_erode, cv_dilate, element_d);
std::vector<cv::Vec4i> lines;
HoughLinesP(cv_dilate, lines, 1, CV_PI / 180, 100,80, 8);
for (size_t i = 0; i < lines.size(); i++)
{
cv::Vec4i v = lines[i];
double delta_x = v[0] - v[2], delta_y = v[1] - v[3];
Line l(cv::Point(v[0], v[1]), cv::Point(v[2], v[3]));
if (fabs(delta_x) > fabs(delta_y))
{
h_lines.push_back(l);
}
else
{
v_lines.push_back(l);
}
}
}
运行结果:
3.提取最终边缘线并得到四个矫正的点。
bool cmpLineY(const Line& p1, const Line& p2)
{
return p1.LC.y < p2.LC.y;
}
bool cmpLineX(const Line& p1, const Line& p2)
{
return p1.LC.x < p2.LC.x;
}
cv::Point2f computeIntersect(Line l1, Line l2)
{
int x1 = l1.LP1.x, x2 = l1.LP2.x, y1 = l1.LP1.y, y2 = l1.LP2.y;
int x3 = l2.LP1.x, x4 = l2.LP2.x, y3 = l2.LP1.y, y4 = l2.LP2.y;
if (float d = (x1 - x2) * (y3 - y4) - (y1 - y2) * (x3 - x4))
{
cv::Point2f pt;
pt.x = ((x1 * y2 - y1 * x2) * (x3 - x4) - (x1 - x2) * (x3 * y4 - y3 * x4)) / d;
pt.y = ((x1 * y2 - y1 * x2) * (y3 - y4) - (y1 - y2) * (x3 * y4 - y3 * x4)) / d;
return pt;
}
return cv::Point2f(-1, -1);
}
void screeningLine(cv::Mat cv_src, std::vector<Line> &h_lines, std::vector<Line> &v_lines, std::vector<cv::Point> &out_points)
{
if (h_lines.size() >= 2 && v_lines.size() >= 2)
{
std::sort(h_lines.begin(), h_lines.end(), cmpLineY);
std::sort(v_lines.begin(), v_lines.end(), cmpLineX);
out_points.push_back(computeIntersect(h_lines[0], v_lines[0]));
out_points.push_back(computeIntersect(h_lines[0], v_lines[v_lines.size() - 1]));
out_points.push_back(computeIntersect(h_lines[h_lines.size() - 1], v_lines[0]));
out_points.push_back(computeIntersect(h_lines[h_lines.size() - 1], v_lines[v_lines.size() - 1]));
}
else
{
out_points.push_back(cv::Point2f(2, 2));
out_points.push_back(cv::Point2f(2, cv_src.rows - 2));
out_points.push_back(cv::Point2f(cv_src.cols - 2, 2));
out_points.push_back(cv::Point2f(cv_src.cols - 2, cv_src.rows - 2));
}
}
运行结果:
4.按四个点矫正图像。
int reviseImage(cv::Mat& cv_src, cv::Mat& cv_dst, std::vector<cv::Point>& in_points)
{
cv::Point point_f, point_b;
point_f.x = (in_points.at(0).x < in_points.at(2).x) ? in_points.at(0).x : in_points.at(2).x;
point_f.y = (in_points.at(0).y < in_points.at(1).y) ? in_points.at(0).y : in_points.at(1).y;
point_b.x = (in_points.at(3).x > in_points.at(1).x) ? in_points.at(3).x : in_points.at(1).x;
point_b.y = (in_points.at(3).y > in_points.at(2).y) ? in_points.at(3).y : in_points.at(2).y;
//代码取目标的最小外接矩形,但倾斜45度时会出现比例变形的现象
cv::Rect rect(point_f, point_b);
cv_dst = cv::Mat::zeros(rect.height, rect.width, CV_8UC3);
std::vector<cv::Point2f> dst_pts;
dst_pts.push_back(cv::Point2f(0, 0));
dst_pts.push_back(cv::Point2f(rect.width - 1, 0));
dst_pts.push_back(cv::Point2f(0, rect.height - 1));
dst_pts.push_back(cv::Point2f(rect.width - 1, rect.height - 1));
std::vector<cv::Point2f> tr_points;
tr_points.push_back(in_points.at(0));
tr_points.push_back(in_points.at(1));
tr_points.push_back(in_points.at(2));
tr_points.push_back(in_points.at(3));
cv::Mat transmtx = getPerspectiveTransform(tr_points, dst_pts);
warpPerspective(cv_src, cv_dst, transmtx, cv_dst.size());
return 0;
}
运行结果:



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











