







目录
1. RS485
1.1 简介
首先我们要先了解一下什么是串口?
串口(Serial Port)是一种用于串行通信的硬件接口,通过逐位(bit-by-bit)传输数据,广泛应用于计算机、嵌入式设备、工业控制等领域。其中诸如,UART、RS232、RS422和RS485都遵循类似的通讯协议。
UART(通用异步收发传输器):是一种集成电路,负责处理串行通信协议中的时序生成、数据编码解码等功能,是嵌入式系统中常见的用于实现串行通信的硬件模块。UART本身并不规定具体的电气特性,而是产生遵循串行通信时序的信号(如启动位、数据位、校验位和停止位)。
RS232:是一种早期广泛应用于计算机和终端设备之间的串行通信接口标准,它规定了详细的电气特性,如逻辑1(负电压,通常为-3V-15V)和逻辑0(正电压,通常为+3V+15V)。尽管逻辑电平与TTL电平不同,但可以通过电平转换器将UART产生的TTL电平转换为RS232电平进行远距离传输。
RS422:是一种全双工、差分传输的串行通信标准,它具有较高的抗干扰能力和较长的传输距离,支持多点传输,每个信号都有明确的方向(发送和接收分离),常用于工业控制领域。
RS485:也是一种差分传输的串行通信标准,与RS422类似,但增加了多点通信的能力,支持多个设备通过同一条线路进行通信,但同一时间内只能有一个设备发送数据。
什么是RS485?
与CAN类似,RS485是是一种工业控制坏境中常用的通讯协议,它具有抗干扰能力强、传输距离远的特点。RS485通讯协议由RS232协议改进而来,协议层不变,只是改进了物理层,因而保留了串口通讯协议应用简单的特点。
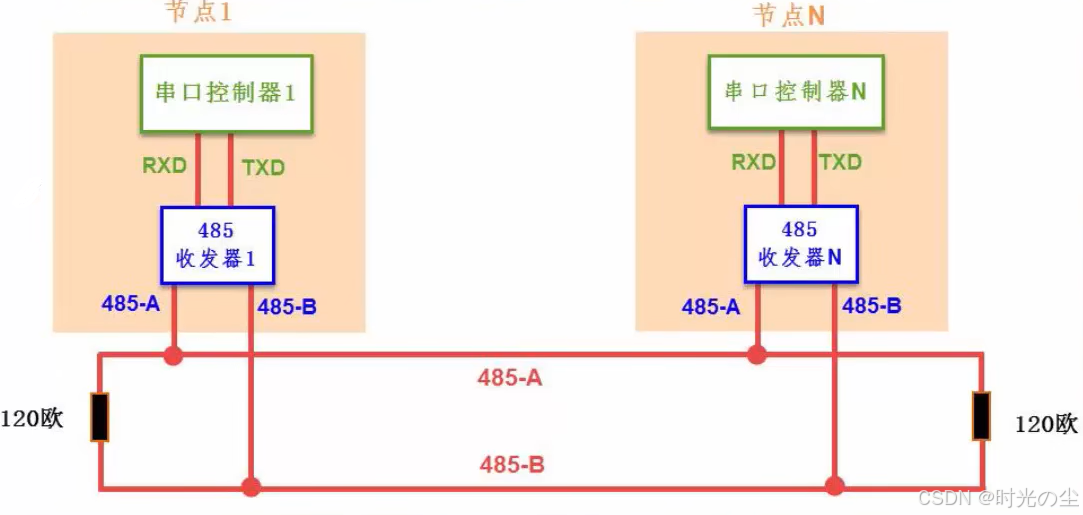
RS485物理层,差分信号线具有很强的干扰能力,特别适合应用于电磁环境复杂的工业控制环境中,RS485协议主要是把RS232的信号改进成差分信号,从而大大提高了抗干扰特性,RS485通讯网络的最大传输距离可达1200米,总线上可挂载128个通讯节点,而由于RS-485网络只有一对差分信号线,它使用差分信号来表达逻辑,当AB两线间的电压差为+2V~+6V时表示逻辑1,当电压差为-6V~-2V 表示逻辑0,在同一时刻只能表达一个信号,所以它的通讯是半双工形式的。
| 通讯接口 | 通讯方式 | 信号线 | 电平标准 | 拓扑结构 | 通讯距离 | 通讯速率 | 抗干扰能力 |
| TTL | 全双工 | TX/RX/GND | 逻辑1:2.4~5V 逻辑2:0~0.4V | 点对点 | 1米 | 100kbps | 弱 |
| RS232 | 全双工 | TX/RX/GND | 逻辑1:-15~-3V 逻辑2:+3~15V | 点对点 | 100米 | 20kbps | 较弱 |
| RS485 | 半双工 | 差分线AB | 逻辑1:+2~+6V 逻辑2:-6~-2V | 多点双向 | 1200米 | 100kbps | 强 |
1.2 收发器
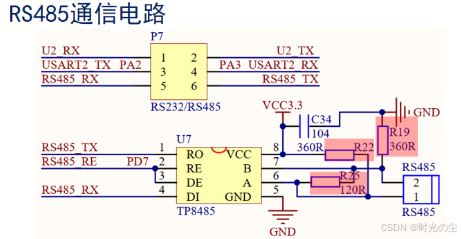
STM32F1系列内部并没有集成RS485的收发器,我们需要外接如SP3485、TP8485E、MAX485等,这类芯片用于实现TTL电平与RS485差分信号电平之间的转换,并具备收发控制功能。
| 引脚 | 功能 | 解释 |
| RO | 接收器输出端 | 当RS485总线上的差分信号满足一定的阈值条件时,RO会根据接收到的差分信号输出对应的逻辑电平。具体来说: 如果 A - B 的电压差大于等于 +0.2V,表明总线上接收到了逻辑“1”,因此RO输出高电平(逻辑“1”)。 |
| RE | 接收器输出使能(低电平有效) | 当RE为低电平时,允许接收器工作,可以正常接收总线上的数据;反之,当RE为高电平时,接收器被禁止接收数据。 |
| DE | 驱动器输出使能(高电平有效) | 当DE为高电平时,允许驱动器工作,可以向总线发送数据;反之,当DE为低电平时,驱动器停止发送数据,进入高阻态,不影响总线上的其他设备通信。 |
| DI | 驱动器输入端 | |
| B | 接收器输入端/驱动器输出端 | |
| A | 接收器输入端/驱动器输出端 |
注意:R19和R22是两个偏置电阻,用来保证总线空闲,AB压差大于0.2V,避免压差不定导致逻辑混乱。
2. 程序设计
在 FreeRTOS 中创建一个任务,该任务的作用是用于接收RS485接收到的数据,我们采用二值信号量进行处理,当RS485接收到数据后,DMA将接收到的数据直接存到数组中,无需CPU的参与,当串口检测到总线空闲后触发中断,重新计数DMA的值,并发送信号量通知任务处理。
这里我使用之前移植好的RCT6模版进行RS485功能:
对于RS485程序设计这一块,你就可以将其理解为多了一个使能引脚的串口来看,当数据想要接收,正常我们使用串口直接接收,但是对于RS485就需要多做一步就是将使能引脚拉低,这时才能正常接收,同理,想要发送就是将使能口进行拉高。所以我们在之前串口进行DMA数据转运的基础上进行修改,详细移植过程可以参考(注意下面文章是ZET6的代码,只需要根据下面步骤移植到RCT6模版即可):
FreeRTOS实战(四)·USART串口实现DMA数据转运(江协/江科大代码移植)_freertos dma-优快云博客
2.1 使能引脚初始化
我们在上述串口的代码的基础上增加使能引脚PB15(任意GPIO即可),注意需要连接到RS485_RE引脚:
声明一些宏定义,方便更改:
#define DEBUG_USART_REDE_GPIO_PORT GPIOB
#define DEBUG_USART_REDE_GPIO_PIN GPIO_Pin_15
#define DEBUG_USART_REDE_GPIO_CLK RCC_APB2Periph_GPIOB
#define DEBUG_USART_REDE_RX_MODE_L GPIO_ResetBits(DEBUG_USART_REDE_GPIO_PORT,DEBUG_USART_REDE_GPIO_PIN)
#define DEBUG_USART_REDE_TX_MODE_H GPIO_SetBits(DEBUG_USART_REDE_GPIO_PORT,DEBUG_USART_REDE_GPIO_PIN)
引脚配置,直接在串口初始化配置函数USART_Config中进行添加:
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_REDE_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_REDE_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_REDE_GPIO_PORT, &GPIO_InitStructure);
DEBUG_USART_REDE_RX_MODE_L;//默认拉低引脚处于接收模式 完整:
void USART_Config(void)
{
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_TX_GPIO_CLK, ENABLE);
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_RX_GPIO_CLK, ENABLE);
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_REDE_GPIO_CLK, ENABLE);
DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);// 打开串口外设的时钟
// 将USART Tx的GPIO配置为推挽复用模式
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);
// 将USART Rx的GPIO配置为浮空输入模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_REDE_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_REDE_GPIO_PORT, &GPIO_InitStructure);
// 配置串口的工作参数
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;// 配置波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;// 配置 针数据字长
USART_InitStructure.USART_StopBits = USART_StopBits_1;// 配置停止位
USART_InitStructure.USART_Parity = USART_Parity_No ;// 配置校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;// 配置硬件流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;// 配置工作模式,收发一起
USART_Init(DEBUG_USARTx, &USART_InitStructure);// 完成串口的初始化配置
// 串口中断优先级配置
NVIC_Configuration();
// 开启 串口空闲IDEL 中断
USART_ITConfig(DEBUG_USARTx, USART_IT_IDLE, ENABLE);//使能 串口空闲中断(IDLE),用于检测一帧数据接收完成。
// 开启串口DMA接收
USART_DMACmd(DEBUG_USARTx, USART_DMAReq_Rx, ENABLE);
// 使能串口
USART_Cmd(DEBUG_USARTx, ENABLE);
DEBUG_USART_REDE_RX_MODE_L;
}2.2 发送函数修改
上面我们也说了,RS485想要发送数据需要将使能引脚拉高,因此发送函数需要进行简单的修改,这里直接贴出来了,就是将使能引脚拉高,发送完后在拉低让其回到接收状态:
/***************** 发送一个字节 **********************/
void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch)
{
DEBUG_USART_REDE_TX_MODE_H;
/* 发送一个字节数据到USART */
USART_SendData(pUSARTx,ch);
/* 等待发送数据寄存器为空 */
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
DEBUG_USART_REDE_RX_MODE_L;
}
/****************** 发送8位的数组 ************************/
void Usart_SendArray( USART_TypeDef * pUSARTx, uint8_t *array, uint16_t num)
{
uint8_t i;
DEBUG_USART_REDE_TX_MODE_H;
for(i=0; i<num; i++)
{
/* 发送一个字节数据到USART */
Usart_SendByte(pUSARTx,array[i]);
}
/* 等待发送完成 */
while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET);
DEBUG_USART_REDE_RX_MODE_L;
}
/***************** 发送字符串 **********************/
void Usart_SendString( USART_TypeDef * pUSARTx, char *str)
{
unsigned int k=0;
DEBUG_USART_REDE_TX_MODE_H;
do
{
Usart_SendByte( pUSARTx, *(str + k) );
k++;
} while(*(str + k)!='\0');
/* 等待发送完成 */
while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET)
{}
DEBUG_USART_REDE_RX_MODE_L;
}
/***************** 发送一个16位数 **********************/
void Usart_SendHalfWord( USART_TypeDef * pUSARTx, uint16_t ch)
{
uint8_t temp_h, temp_l;
DEBUG_USART_REDE_TX_MODE_H;
/* 取出高八位 */
temp_h = (ch&0XFF00)>>8;
/* 取出低八位 */
temp_l = ch&0XFF;
/* 发送高八位 */
USART_SendData(pUSARTx,temp_h);
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
/* 发送低八位 */
USART_SendData(pUSARTx,temp_l);
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
DEBUG_USART_REDE_RX_MODE_L;
}
//重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
DEBUG_USART_REDE_TX_MODE_H;
/* 发送一个字节数据到串口 */
USART_SendData(DEBUG_USARTx, (uint8_t) ch);
/* 等待发送完毕 */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET);
DEBUG_USART_REDE_RX_MODE_L;
return (ch);
}
//重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数
int fgetc(FILE *f)
{
DEBUG_USART_REDE_TX_MODE_H;
/* 等待串口输入数据 */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) == RESET);
DEBUG_USART_REDE_RX_MODE_L;
return (int)USART_ReceiveData(DEBUG_USARTx);
}
3. 验证
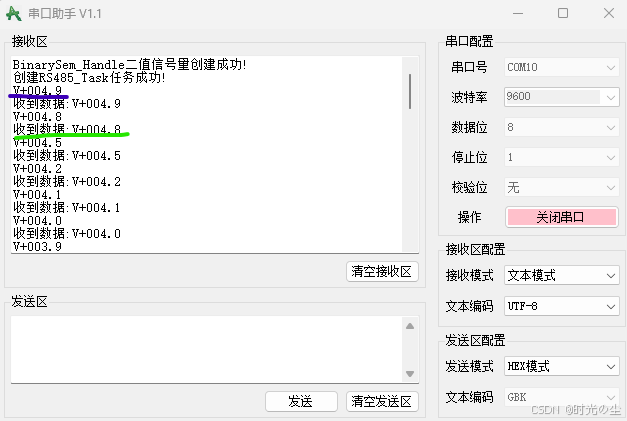
上面做了简单的修改,已经能够直接使用了,我们来通过串口验证一下:
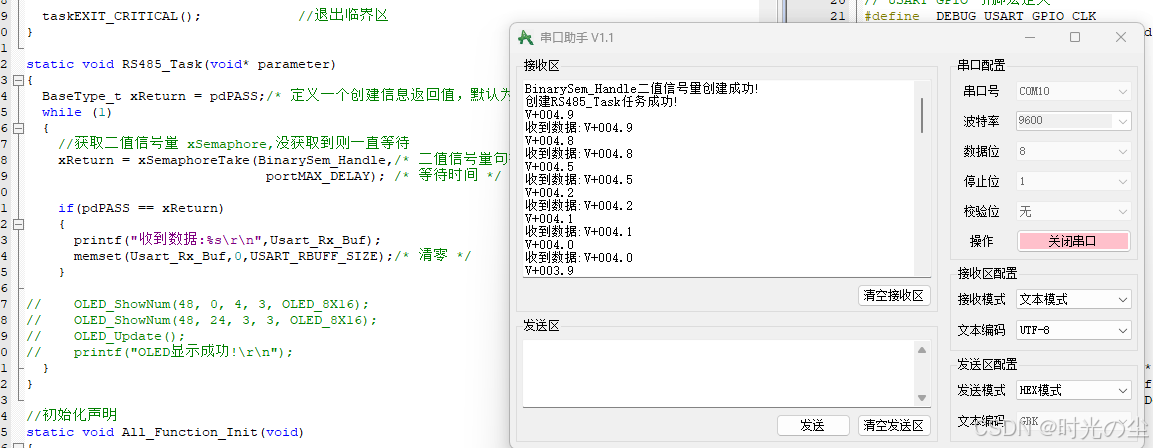
其中蓝线的数据是我测速传感器直接发送的数据,绿线是发送给芯片,芯片回传的数据:



















 1295
1295

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











