



低功率拖拉机传动系统设计的决策支持系统
摘要
本研究采用Visual Basic 6.0编程语言开发了一个决策支持系统(DSS),用于低马力农用拖拉机传动系统设计,涵盖离合器和变速箱的设计。该决策支持系统通过连接数据库,提供了图形用户界面,基于改进的ASABE牵引力模型,为低马力拖拉机传动系统设计提供决策支持。所开发的拖拉机传动系统设计程序可计算离合器尺寸、传动比、每个齿轮的齿数以及各种齿轮设计参数。根据实测值和预测值(模拟值)计算了拖拉机传动系统设计的相关偏差。离合器片外径设计的相关偏差小于7%,内径偏差小于3%。在齿轮比设计方面,所开发的决策支持系统的预测结果与实际测量结果之间的差异小于1%。该决策支持系统程序具有用户友好性和高效性,可用于预测不同拖拉机型号的传动系统设计,满足研究机构和工业界的需求。
关键词
决策支持系统;拖拉机传动系统;低功率拖拉机;仿真;ASABE方程
引言
用于拖拉机传动系统设计的计算机模型和仿真程序,帮助研究人员和学生在无需经历复杂且迭代的设计过程的情况下,确定与拖拉机传动系统相关的各种参数。同时,通过比较和分析影响拖拉机传动系统设计的各种参数,这些工具也帮助研究人员和制造商改进拖拉机传动系统设计。随着新软件开发的快速进展以及相关趋势的发展,增强现有的应用软件和编程语言促进了用户与计算机之间的交互。
为了满足农业工程中农业机械领域的教学和研究需求,许多研究致力于开发基于计算机的模型和仿真程序。齿轮的设计涉及对几何因素的分析和处理,以优化表面压应力、齿应力、齿弯曲应力等参数。拉德泽维奇提供了直齿轮设计的详细步骤。巴金汉和巴金汉以表格形式提供了用于计算传动比的信息,使得能够采用简单直接的方法,为多种需求和应用找到合适的各类齿轮组合。Mitra和Prasad提供了直齿轮设计的详细步骤,并附有侧隙标准表。
接触比的数值和简单计算过程。拉马穆尔蒂等人描述了一种基于输入功率、输入转速和变速箱净减速比的两速变速箱设计方法。用户可选择轴和齿轮的材料。该方法确定了轴的尺寸、齿轮规格、轴承选型、占用的总体空间以及变速箱的自重。钟等人提出了一种新的通用四步法,通过将尺寸设计和结构设计过程整合到一个形式化算法中,用于多级齿轮传动的设计。第一步,用户初步设定减速级数;第二步,使用随机搜索法在指定变速比范围内选择各级的传动比;下一步,将这些传动比作为齿轮尺寸设计的基本输入;第三步,选择齿轮基本设计参数的取值;最后一步,采用模拟退火算法进行结构设计,计算节距参数和外径等设计参数,并确定齿轮和轴的位置,在满足空间约束的前提下最小化变速箱的几何体积。这些步骤被迭代执行,直到获得理想解为止。阿格里斯等人开发了一个用于蜗轮蜗杆系统设计的齿面接触分析程序。该程序用Visual Basic (VB)语言编写,能够结合数值计算和图形显示。Thompson等人阐述了直齿轮设计的详细流程,旨在减少总体积和重量。他们利用MATLAB1软件中的优化工具箱开发了一个程序以优化齿轮设计。他们得出结论:在更高传动比情况下,三级设计明显更优,相比两级设计最多可实现20%的重量降低。
利用不同的编程工具开发了用于预测拖拉机性能的仿真软件。目前,VB和Visual C++语言、MATLAB的SIMULINK以及PG-Sim被用于开发此类程序。可视化语言(如VB)的可用性使用户易于使用。Mondal等人在VB 6.0中开发了一个程序,用于设计TAFE拖拉机的变速16+4速度变速箱。
ASABE模型不适用于预测拖拉机在印度土壤条件下的牵引力功率。改进的ASABE模型在印度粘性/摩擦性土壤条件下使用时,能够准确预测拖拉机具系统的牵引力。这些模型未包含对离合器尺寸、齿轮比以及每个齿轮齿数的计算。研究强调了有必要开展基于计算机的模型和仿真程序开发,以通过分析各种参数的相对重要性来改进拖拉机传动系统设计。鉴于现有软件的局限性,开发了一个基于VB的决策支持系统(DSS),用于低功率两轮驱动(2WD)拖拉机传动系统的设计。该开发的程序还提供了一种新的计算工具,使学生能够熟悉齿轮系、齿轮术语、传动比以及传动系统设计步骤中的基本概念和入门知识。
理论考虑
拖拉机传动系统包括发动机与驱动轮之间以及动力输出轴驱动的动力传递元件。它由离合器、变速箱、差速器、终传动和动力输出轴组成。在程序开发中,采用了拉德泽维奇定义的齿轮设计参数、齿轮运动学、几何结构和综合设计。此外,匹配的离合器设计也将提高系统的效率。开发的软件中使用了改进的ASABE模型进行牵引力和功率需求预测,以实现更精确的拖拉机变速箱设计。该决策支持系统的子系统包括离合器设计、变速箱设计以及用于牵引力预测的改进的ASABE模型。
离合器设计
低马力印度拖拉机配备了手动操作离合器。由于相对较低的惯性,它们具有良好的扭矩输出能力,并便于换挡。传动系统中常采用干式单片摩擦离合器。
在低成本下提供了更高的承载能力和耐久性。在运行条件下,压力分布被调整为使产品压力保持恒定。在整个新的接触摩擦表面上实现了均匀的压力分布。在离合器设计中,假设摩擦衬片在最大工作时间内处于均匀磨损状态。
变速箱设计
拖拉机传动系统的设计需要确定各档位的传动比、每个齿轮的齿数、齿轮中心距以及各个齿轮的各种设计参数。假设轮齿中的动载荷由齿形误差、周节误差和齿在载荷下的挠曲引起。由于扭矩引起的齿变形、轴的挠曲、轴承位置和不对中,作用在轮齿上的载荷并非均匀分布。在编程过程中计算每个齿轮的齿数时,取载荷集中系数(K)为1.1,冲击系数(K0)为1.1,动载荷系数(Kd)为1.1。用于开发该程序的不同齿轮参数和公式见表1。
改进的ASABE牵引力预测模型
美国农业与生物工程师学会[14]针对多种土壤条件下的各类农业机具和机械的牵引力需求定义了公式(1)条件。公式(1)经过修改,用于预测在印度理工学院(IIT),克勒格布尔的中等质地土壤上进行不同田间作业时的牵引力。引入了附加修正系数K1和K2,以考虑使用改进的ASABE牵引力模型计算中等质地土壤条件下铧式犁、耕耘机和圆盘耙的牵引力变化情况(2)。
$$
Di = Fj(A + B Va + CVa^2)WcH \quad (1)
$$
$$
Dim = K1(F2(A + B Va + CVa^2)WcH) + K2 \quad (2)
$$
校正系数K1的值分别为:铧式犁1.735、耕耘机0.809和圆盘耙0.73;K2的值分别为:铧式犁1,618、耕耘机4,048和圆盘耙1,406。K1和K2的值是通过寻找相同机组、土壤和操作参数条件下观测值与(ASABE模型)预测值的最佳拟合方程确定的。三种作业(犁耕、耙地和耕作)的决定系数范围为0.90至0.93。主要耕作机具(即铧式犁、耕耘机和圆盘耙)的切割宽度(Wc)分别通过公式Wc=nw、Wc=n和Wc=0.95NdSd−0.6Dd计算得出。
决策支持系统设计过程
低功率拖拉机传动系统的决策支持系统开发包括三个内部阶段,即分析、算法设计和编码阶段。
分析
需要以用户友好且易于访问的方式生成和显示传动系统的设计参数。该决策支持系统基于某些输入参数开发而成,通过编写的代码(设计方程)准确计算输出参数,以确定各种结果。
算法设计
它涉及以逻辑方式开发指令,使得执行这些指令能够解决问题。使用流程图可使编程阶段更加简便,避免算法上的歧义。用于计算设计参数的各种输入参数和方程均包含在流程图所示的模块中(图1和图2)。图1为计算不同齿轮比的流程图,图2为计算齿轮参数的流程图。
编码
准确高效的编码是决策支持系统正常运行的主要和重要方面。开发了具有专用编码的VB程序,用于农用拖拉机传动系统设计。编码中采用了针对印度中等质地土壤的改进的ASABE牵引力模型(公式2),并结合了机械和土壤特定参数。不同的离合器和齿轮设计公式也被编码以开发程序模块(表1)。使用集成开发环境(IDE)来编译该程序。通过调试代码的每个阶段来检查错误。调试有助于避免传动系统设计程序中出现大量无法追踪的错误。
材料与方法
基于改进的ASABE模型(公式2),针对印度土壤和操作条件,开发了一套用于拖拉机传动系统设计的Visual Basic (VB)决策支持系统。该程序具有灵活性、面向对象且用户友好,采用VB 6.0作为前端进行开发。该程序分为两个子系统,即离合器设计和变速箱设计。开发了多个顺序图形用户界面屏幕以完成整个流程并获得期望输出。所开发的图形用户界面屏幕非常直观,便于选择数值并在需要时输入所需的设计参数。该开发的软件已在印度理工学院,克勒格布尔(印度)通过三台低功率农用拖拉机的实际测量读数,对拖拉机传动系统设计进行了验证。
离合器设计
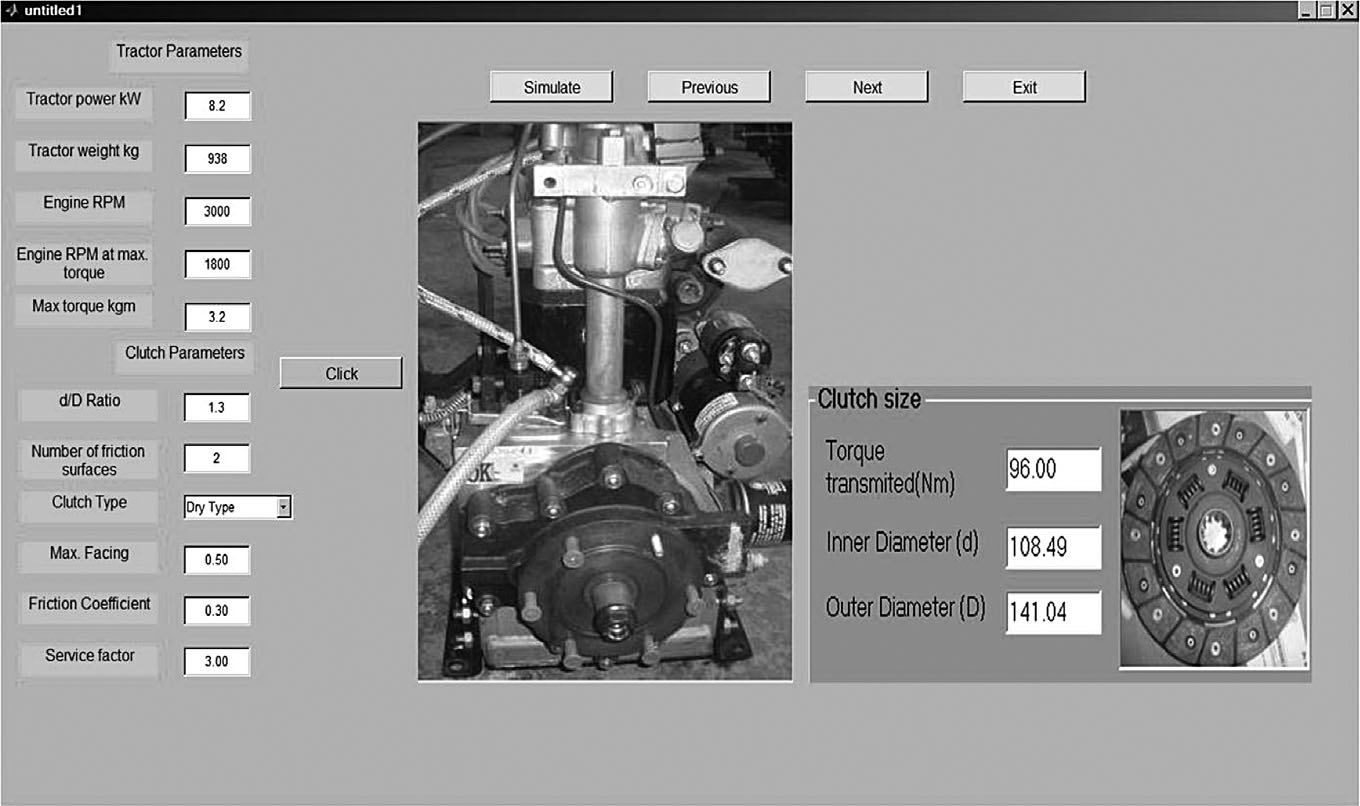
根据低马力拖拉机离合器的要求条件进行了离合器设计。离合器设计需要拖拉机发动机规格(拖拉机功率、拖拉机重量、发动机转速、最大扭矩)、离合器参数(d/D比、摩擦面数量)以及离合器类型和花键摩擦系数(sf)。在确定所需的设计参数之前,对不同输入进行了仿真。离合器设计的图形用户界面如图3所示,包含用于仿真的基础数据库,以预测离合器设计的参数。用户可编辑、删除或添加特定参数,并进行仿真以获得更优结果。该图形用户界面还提供了从弹出菜单中选择离合器类型以及进行仿真以预测设计参数和性能的选项。离合器尺寸设计的输出结果为如图3所示,并以用户所需的最终结果结束。开发的程序确定了离合器传递的扭矩(Nm)以及内外径(mm)。
变速箱设计
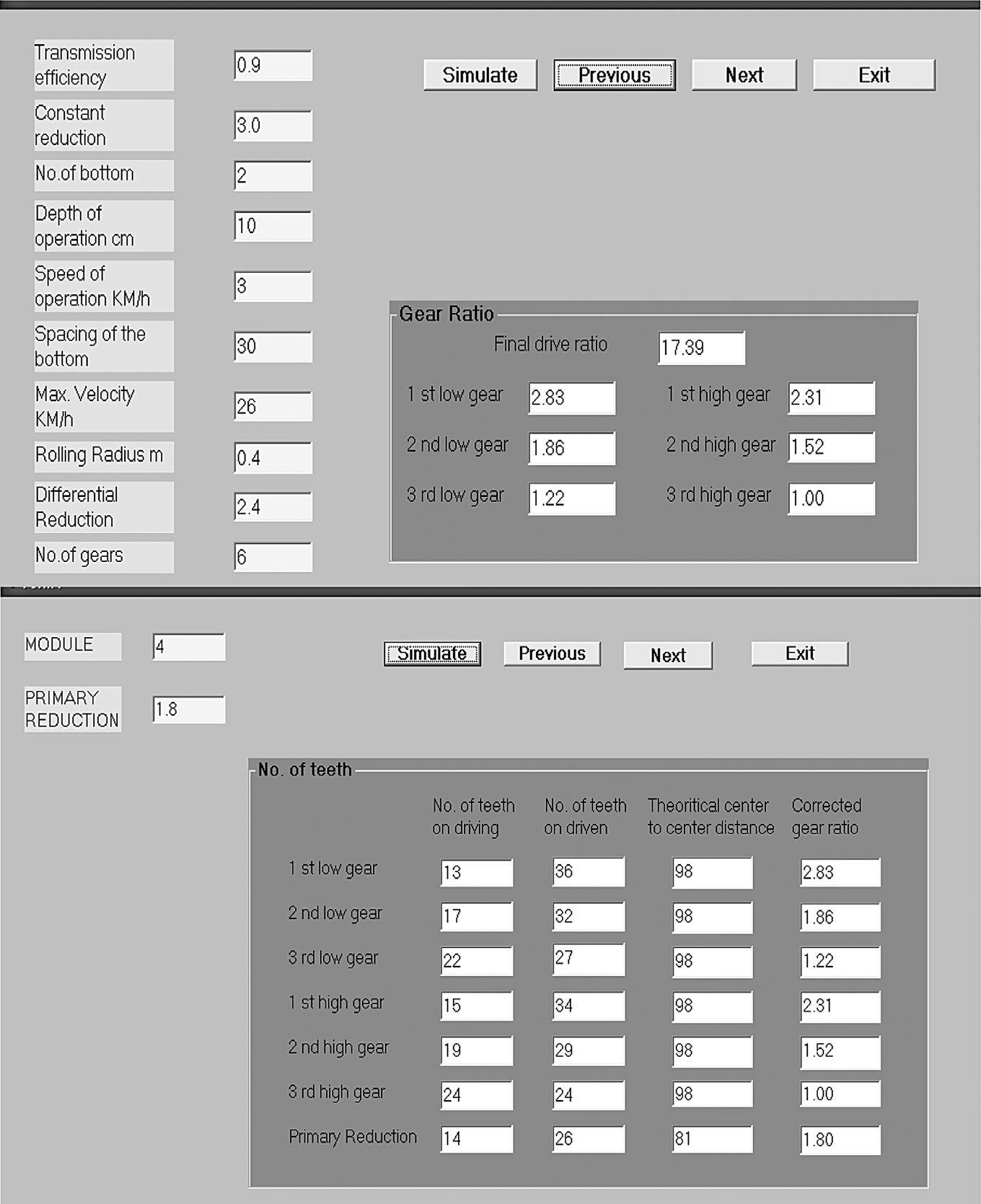
不同齿轮比模块的计算流程图如图2所示。齿轮设计的图形用户界面包含四个按钮,即仿真、上一步、下一步和退出。齿轮比和齿数的图形用户界面的输入和输出(仿真后)窗口如图4所示。当选择下一步按钮时,将打开一个图形用户界面,其中包含输入参数的选项,用于确定不同的齿轮比。这些参数包括传动效率(ht)、恒定减速比(Cr)、底部数量(n)、作业深度(H)、作业速度(Va)、底部间距(w)、最大速度(Vmax)、滚动半径(rr)、差速器减速比(Dr)和齿轮数量(y)。最后,模拟齿轮比的输出界面显示各挡位的齿轮比及总最终传动减速比(Fr)。该界面提供了一个模拟按钮以预测其性能。齿数计算的输出界面如图4所示,显示了小齿轮(z1)和大齿轮(z2)的齿数。
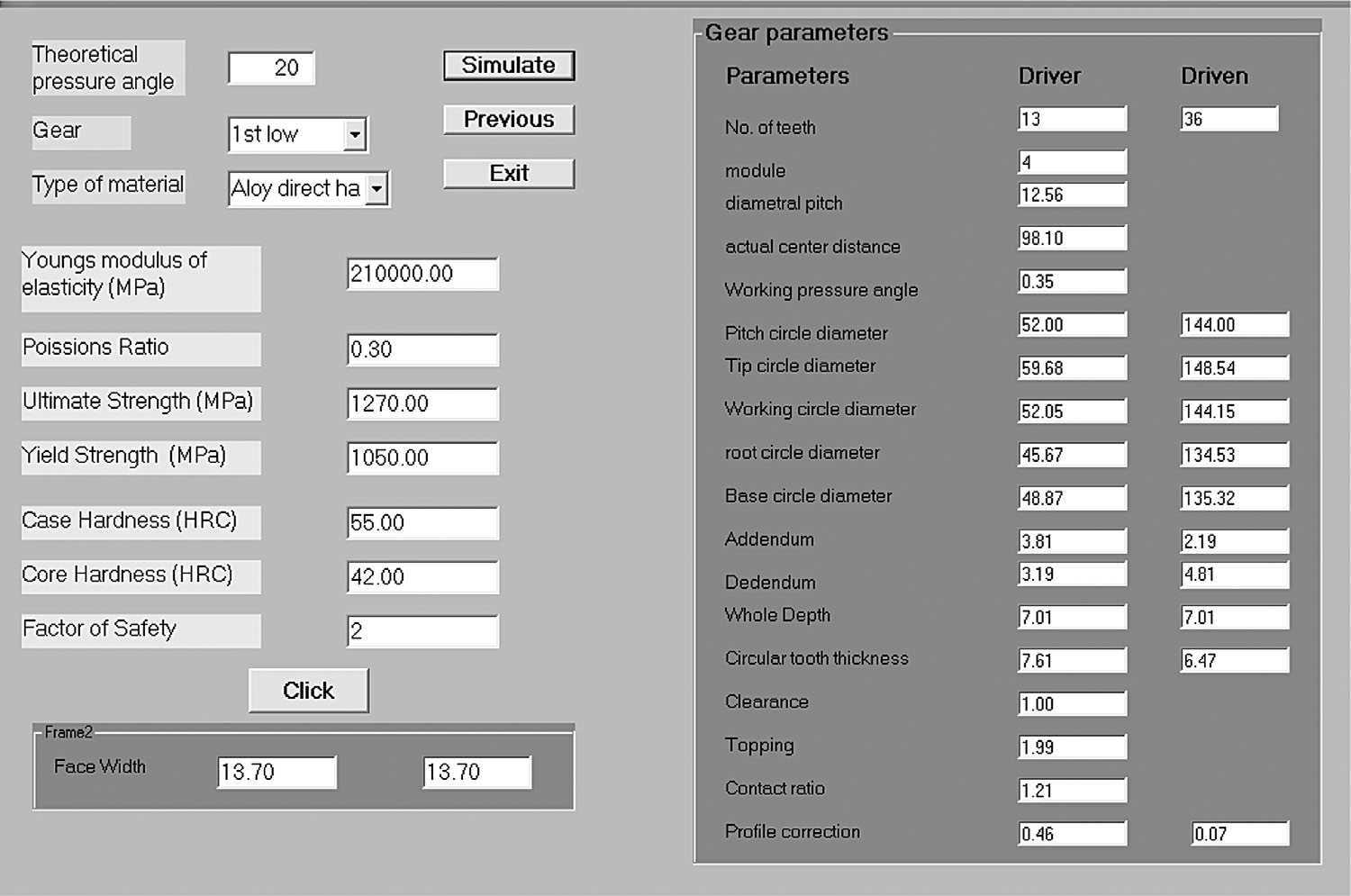
不同齿轮参数的计算。如图5所示的图形用户界面允许用户输入理论压力角(a)。该界面还提供了弹出菜单选项,用于选择需要确定参数的齿轮副,以及最重要的用于齿轮生产的材料类型。在选择材料类型后,点击屏幕上提供的“Click”按钮,屏幕将显示所选材料的各种材料属性。在图形用户界面上点击“Simulate”按钮后,将打开齿轮参数的输出界面,如图5所示。设计主动齿轮和从动齿轮时使用了切向力(Ft)、圆周速度(v)、速度系数(Kv)以及面宽(Bf)。

所开发决策支持系统的验证
选择了三台动力输出轴功率分别为10.03、18.64 和 26.09kW 动力输出轴功率的拖拉机,用于测试开发的决策支持系统。通过测量拖拉机的实际读数,并与开发的程序预测值进行比较,验证了该程序在拖拉机传动系统设计中的适用性。对拖拉机进行了拆解,以测量离合器和齿轮参数。根据每个齿轮的齿数测量读数,计算了不同档位的传动比。同时还计算了特定齿轮的各种齿轮参数。基于实测值和预测值(模拟值)对拖拉机传动系统设计进行了相关偏差 (RD) 的计算。相关偏差 (RD) 定义如下:
$$
RD = \frac{1}{N} \sum_{i=1}^{N} \frac{|P_i - O_i|}{P_i} \times 100 \quad (3)
$$
其中,$P_i$ 为程序预测值,$O_i$ 为实际齿轮测量得到的观测值,$N$ 为观测次数。
评估所开发决策支持系统的问卷
表2中给出了一份问卷,由27名本科生用于评估决策支持系统。该问卷包含关于低功率拖拉机传动系统设计所开发的决策支持系统的问题。这些问题没有正确或错误的答案。要求学生使用1到5的量表对决策支持系统评分,分别对应“1=强烈不同意,2=不同意,3=既不同意也不反对,4=同意,5=强烈同意”。调查结果见表2。
| 序号 | 问题 | 平均值(标准差) |
|---|---|---|
| 1. | 该程序的流程图有助于理解传动系统设计所涉及的步骤 | 4.8 (±0.61) |
| 2. | 程序中的细节(如方程和术语表)展示得非常清晰 | 4.2 (±0.81) |
| 3. | 该程序的内容以易于理解的格式呈现 | 4.7 (±0.68) |
| 4. | 从教育和研究的角度来看,该程序的内容具有信息丰富的特点 | 4.5 (±0.40) |
| 5. | 该程序组织良好 | 4.7 (±0.76) |
| 6. | 该程序易于使用 | 4.3 (±0.53) |
| 7. | 该程序有助于了解传动系统 | 4.6 (±0.42) |
| 8. | 程序中提供的信息清晰简洁 | 3.9 (±0.88) |
| 9. | 该程序提高了对传动系统设计的兴趣 | 4.5 (±0.84) |
| 10. | 我更愿意使用此程序进行拖拉机传动系统设计 | 4.7 (±0.71) |
| 总评分 | 4.49 (±0.66) |
结果与讨论
该DSS程序采用VB编程语言编写,使用改进的ASABE牵引模型来预测拖拉机性能。该程序通过连接拖拉机规格、农具数据、轮胎尺寸以及改进的ASABE牵引方程模型等数据库,提供了直观的用户界面,用于预测选定功率范围拖拉机的传动系统设计。所开发的基于VB的程序具有灵活性,可根据土壤条件选择或编辑输入参数,以设计匹配拖拉机‐农具组合的拖拉机传动系统。改进的ASABE模型用于预测农具牵引力,以支持传动系统设计。程序的输出结果可被以电子表格格式导出,供进一步分析使用。
离合器参数
离合器尺寸设计的输出界面显示了离合器设计参数,如传递扭矩(T)、外径(D)和内径(d)。离合器设计数据集的计算相对偏差值在表3中给出。离合器片内径数据集表明,最大和最小相对偏差为:
| 动力输出功率 (kW) | 离合器片内径(毫米) O | P | RD | 离合器片外径 (毫米) O | P | RD |
|---|---|---|---|---|---|---|
| 10.03 | 110 | 108.47 | 1.41 | 150 | 141.02 | 6.24 |
| 18.64 | 250 | 242.5 | 3.09 | 310 | 290.5 | 6.71 |
| 26.09 | 290 | 283.6 | 2.26 | 342 | 322.08 | 6.18 |
O,观测值;P,软件预测值;RD,相对偏差(%)。
对于18.64和10.03千瓦的拖拉机,离合器片外径在18.64千瓦动力输出轴功率的拖拉机上达到最大值。相对偏差值还表明,预测结果与实际设计相比,离合器片外径的偏差小于7%,内径的偏差小于3%。这种差异可能是由于计算方法(表1)以及开发决策支持系统所采用的各种预测模型的精度水平所致。
传动比
一台动力输出功率为10.03千瓦的拖拉机在六个前进挡位进行了测试,两台动力输出功率分别为18.64千瓦和26.09千瓦的拖拉机在八个前进低速和高速挡位(L1、L2、L3、L4、H1、H2、H3和H4)进行了测试。测试的齿轮比数据集如表4所示,
| 动力输出功率,kW | 选定档位 | O | P | RD |
|---|---|---|---|---|
| 10.03 | L1 | 2.77 | 2.83 | 2.12 |
| L2 | 1.88 | 1.86 | 1.08 | |
| L3 | 1.23 | 1.22 | 0.82 | |
| H1 | 2.26 | 2.31 | 2.16 | |
| H2 | 1.53 | 1.52 | 0.66 | |
| H3 | 1.00 | 1.00 | 0.00 | |
| 18.64 | L1 | 20.64 | 20.62 | 0.10 |
| L2 | 14.32 | 14.31 | 0.07 | |
| L3 | 10.81 | 10.80 | 0.10 | |
| L4 | 6.61 | 6.60 | 0.15 | |
| H1 | 5.04 | 5.00 | 0.80 | |
| H2 | 3.50 | 3.48 | 0.57 | |
| H3 | 2.64 | 2.63 | 0.38 | |
| H4 | 1.61 | 1.59 | 1.26 | |
| 26.09 | L1 | 9.06 | 9.02 | 0.44 |
| L2 | 5.71 | 5.68 | 0.53 | |
| L3 | 4.02 | 4.00 | 0.50 | |
| L4 | 2.68 | 2.63 | 0.02 | |
| H1 | 3.38 | 3.36 | 0.60 | |
| H2 | 2.13 | 2.12 | 0.47 | |
| H3 | 1.49 | 1.48 | 0.70 | |
| H4 | 1.00 | 1.00 | 0.00 |
O,观测值;P,软件预测值;RD,相对偏差(%)
在大多数情况下,开发的程序预测结果与实际测量值之间的变化小于1%。对于10.03千瓦动力输出功率拖拉机,高速一挡齿轮的最大相对偏差为2.16%,高速三挡齿轮为零。对于18.64千瓦和26.09千瓦动力输出功率拖拉机,四档低速和低速二挡的最小相对偏差分别为0.02%和0.07%。相对偏差的变化可能是由于测量拖拉机传动系统数据时存在仪器误差,或在开发程序中使用了不同的预测模型和公式所致。
齿轮参数
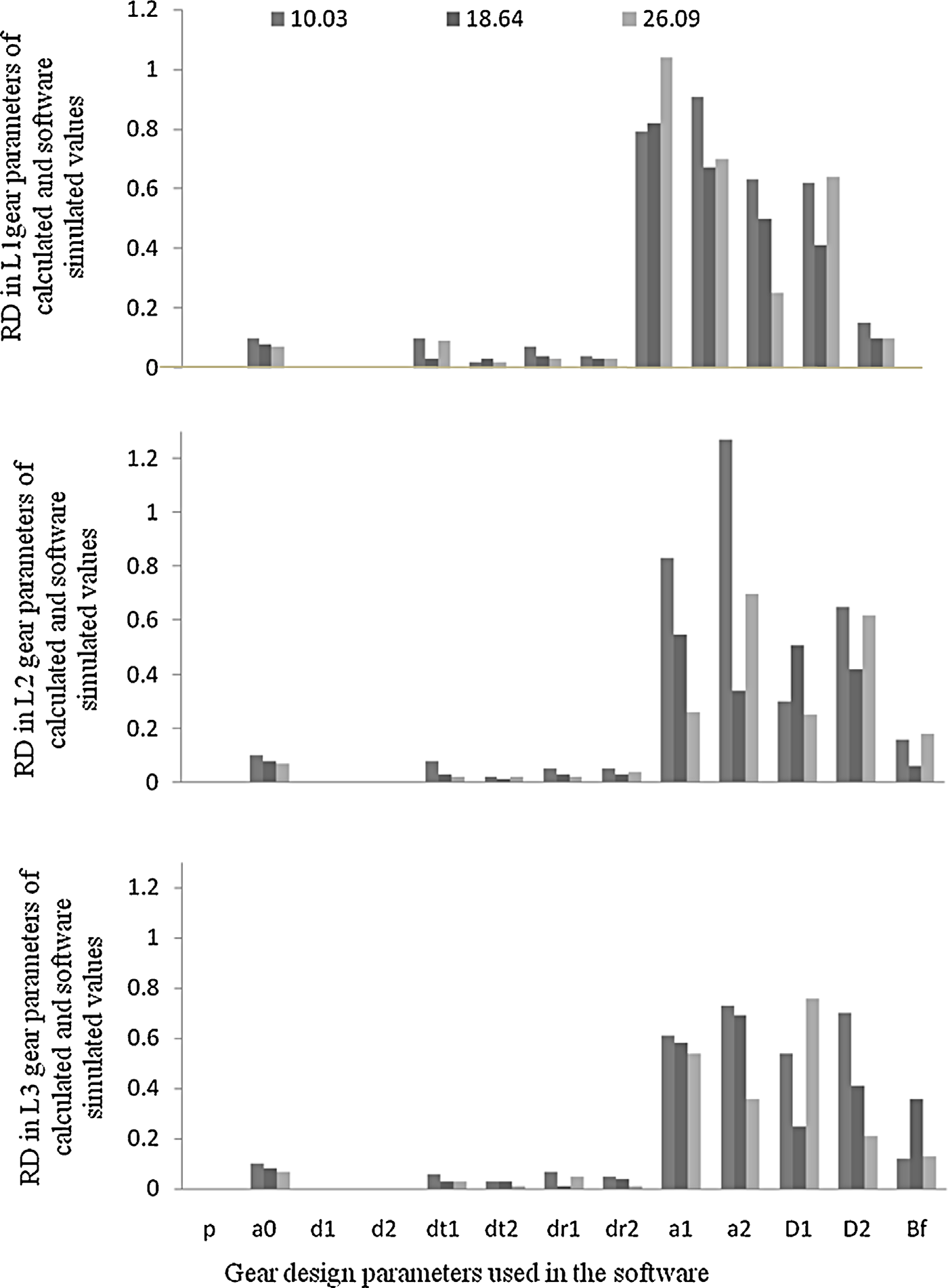
不同动力输出功率的拖拉机通过计算值和软件模拟值获得的各齿轮参数比较如图6所示。对于齿距(p),相对偏差为零。

在三款不同低功率拖拉机变速箱的所有挡位中,计算值与软件预测值之间均观察到差异。在10.03 和 18.64 千瓦动力输出拖拉机中,从动齿轮齿顶(a2)处的相对偏差最大,但在26.09 千瓦动力输出拖拉机的L3挡位中并非如此。在10.03 千瓦动力输出拖拉机的三个测试挡位(L1、L2 和 L3)中,最大相对偏差出现在a2。对于18.64 千瓦动力输出拖拉机,L1 和 L2 挡位中的最大相对偏差出现在a1。在26.09 千瓦动力输出拖拉机中,L3 挡位的最大相对偏差出现在主动齿轮的齿根(D1)。与低功率拖拉机传动系统设计的测量值相比,开发的决策支持系统预测结果的相关偏差小于7%。因此,开发的决策支持系统能够以合理的准确度预测结果。由此可见,该决策支持系统在低功率拖拉机传动系统设计方面具有灵活性和有效性。这将最终帮助研究人员和教育工作者根据拖拉机‐机具系统、土壤和操作参数选择合适尺寸的传动系统。
调查结果与对开发的决策支持系统的反馈
表2显示了对开发的决策支持系统进行评估的调查结果。学生对该程序的评价主要为正面。大多数学生对程序的易用性和指令的简洁性表示高度满意。问卷中10个问题的总评分为5.0分中的4.49分。这表明学生认为基于决策支持系统的拖拉机传动系统设计是有帮助的、信息丰富的、快速的且易于使用的。学生们强烈认为,该程序的流程图有助于理解拖拉机传动系统设计所涉及的步骤。“程序中提供的信息清晰简洁”这一问题得分最低,为3.9分。以下是根据27名本科生在低功率拖拉机传动系统设计方面的反馈所观察到的开发的决策支持系统的优点和缺点。
优点
- 该程序在拖拉机传动系统设计方面,不要求用户深入了解齿轮系和齿轮术语的引言知识。
- 由于决策支持系统中提供了弹出式和下拉菜单功能,该程序在拖拉机传动系统设计方面引起了用户更大的兴趣。
- 由于微软操作系统的普及,该程序在大多数地方都易于使用。
限制条件
- 软件与其他操作系统的不兼容问题。
- 对设计背后的理论和数学理解感缺失。
结论
在VB编程环境中开发了一种基于仿真的用户友好型决策支持系统,用于低功率农用拖拉机的传动系统设计。该程序采用改进的ASABE模型来预测牵引力和牵引性能。该程序可通过图形用户界面仿真变速箱和离合器设计的各个方面。该模型使用从低功率拖拉机测试中获得的实际测量数据进行了验证。该程序在拖拉机传动系统设计方面表现出非常接近的预测。因此,可以得出结论:开发的程序在低马力拖拉机传动系统设计中是有效且具有支持作用的。

















 1685
1685

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









