






01 Moraver算子
1.基本原理
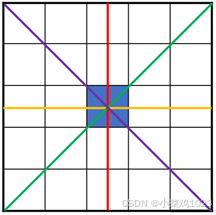
Moravec于1977年提出利用灰度方差提取点特征的算子,是一种基于灰度方差的角点检测方法,它通过计算图像中每个像素点沿着水平、垂直、对角线及反对角线的四个方向的灰度方差来检测角点。
2.算法步骤
(1)兴趣值计算
对于图像中的每个像素点,以其为中心取一个窗口,计算该窗口内像素在四个方向上的灰度差的平方和。如公式(1)所示。(注意在此处c为列,r为行)。
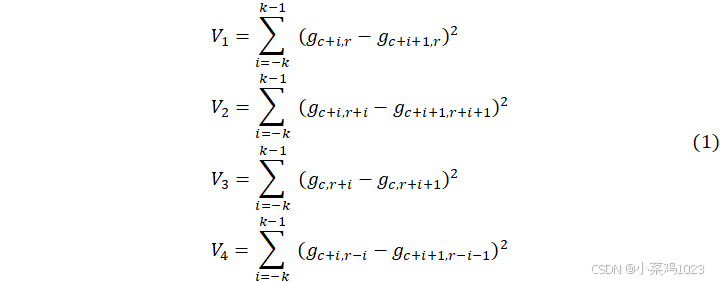
其中K为窗口大小一半取整,对于整幅图像来说,窗口大小可以忽略不计,因此不考虑边缘像素处理。
![]()
取计算结果的最小值作为兴趣值。
(2)阈值筛选
给定一个经验阈值,将兴趣值大于该阈值的点作为候选点。
(3)非极大值抑制
给定另一个窗口,选取兴趣值最大的点,作为特征点。
02 C语言(c++)代码实现
#include <iostream>
#include <stdio.h>
#include <omp.h>
#include <opencv2/opencv.hpp>
#include <iomanip>
using namespace cv;
using namespace std;
//文件读取,灰度图或者RGB图像
void readData(const char* filePath, int r, Mat& img) {
if (r == 1)
img = imread(filePath, IMREAD_GRAYSCALE);
else
img = imread(filePath);
}
//计算兴趣值
void Moravec_iv(Mat& iv, Mat img, int win_size) {
int k = win_size / 2;
for (int i = k; i < img.rows - k; i++) {
for (int j = k; j < img.cols - k; j++) {
double v1 = 0, v2 = 0, v3 = 0, v4 = 0;
for (int l = -k; l <= k - 1; l++) {
double temp1 = img.at<uchar>(i, j + l) - img.at<uchar>(i, j + l + 1);
v1 += temp1 * temp1;
double temp2 = img.at<uchar>(i + l, j + l) - img.at<uchar>(i + l + 1, j + l + 1);
v2 += temp2 * temp2;
double temp3 = img.at<uchar>(i + l, j) - img.at<uchar>(i + l + 1, j);
v3 += temp3 * temp3;
double temp4 = img.at<uchar>(i - l, j + l) - img.at<uchar>(i - l - 1, j + l + 1);
v4 += temp4 * temp4;
}
iv.at<double>(i, j) = fmin(fmin(v1, v2), fmin(v3, v4));
}
}
}
//阈值筛选
void Moravec_threshold_value_points(Mat& iv, Mat img, int win_size, double threshold_value) {
for (int i = 0; i < img.rows; i++) {
for (int j = 0; j < img.cols; j++) {
if (iv.at<double>(i, j) > threshold_value)
iv.at<double>(i, j) = iv.at<double>(i, j);
else
iv.at<double>(i, j) = 0;
}
}
}
//寻找抑制窗口内的极大值
void find_max_in_window(Mat img, Mat iv, int window_size, int row, int col, int& max_row, int& max_col) {
int k = window_size / 2;
double max_value = 0;
max_row = -1;
max_col = -1;
for (int i = -k; i <=k; i++) {
for (int j = -k; j <= k; j++) {
int r = row + i;
int c = col + j;
if (r >= 0 && r < img.rows && c >= 0 && c < img.cols) {
double value = iv.at<double>(r, c);
if (value > max_value) {
max_value = value;
max_row = r;
max_col = c;
}
}
}
}
}
//特征点选取
void Moravec_extremum_points(Mat iv, Mat img, Mat& mask, int win_size1, int win_size2, double threshold_value) {
int k = win_size2 / 2;
//注意为整个窗口滑动而不是逐个像素滑动
for (int i = k; i < img.rows - k; i+= win_size2){
for (int j = k; j < img.cols - k; j+= win_size2){
int max_row, max_col;
find_max_in_window(img, iv, win_size2, i, j, max_row, max_col);
if (max_row >= 0 && max_row < img.rows && max_col >= 0 && max_col < img.cols)
mask.at<double>(max_row, max_col) = 1;
}
}
}
int main() {
Mat img;
const char* filePath = "img.jpg";
readData(filePath, 1, img);
if (img.empty()) {
cerr << "无法读取图像文件: " << filePath << endl;
return -1;
}
cout << "文件已经读取" << endl;
Mat iv = Mat::zeros(img.rows, img.cols, CV_64F);
Mat mask = Mat::zeros(img.rows, img.cols, CV_64F);
int win_size = 5;//兴趣值计算窗口
int win_size2 = 100;//抑制窗口
int threshold_value = 2000;//经验阈值
Moravec_iv(iv, img, win_size);
cout << "兴趣值已经计算" << endl;
Moravec_threshold_value_points(iv, img, win_size, threshold_value);
cout << "候选点已经选取" << endl;
Moravec_extremum_points(iv, img, mask, win_size, win_size2, threshold_value);
cout << "极值点已经选择" << endl;
Mat img_with_points;
readData(filePath, 2, img_with_points);
int count = 0;
for (int i = 0; i < mask.rows; i++) {
for (int j = 0; j < mask.cols; j++) {
if (mask.at<double>(i, j) == 1) {
circle(img_with_points, Point(j, i), 2.5, Scalar(0, 0, 255), -1);
string pointIndex = to_string(count);
putText(img_with_points, pointIndex, Point(j + 5, i - 5), FONT_HERSHEY_SIMPLEX, 1, Scalar(0, 0, 255), 1);//根据图像大小需要调整字体,确保正确显示
count++;
}
}
}
cout << "共有" << count << "个特征点" << endl;
//调整图像显示比例
int screenWidth = 1920;
int screenHeight = 1080;
int winWidth = img.cols, winHeight = img.rows;
double imgRatio = static_cast<double>(img.cols) / img.rows;
if (img.cols > screenWidth)
{
winWidth = screenWidth;
winHeight = winWidth / imgRatio;
}
else if (img.rows > screenHeight)
{
winHeight = screenHeight;
winWidth = winHeight * imgRatio;
}
namedWindow("Image with Points", WINDOW_NORMAL);
resizeWindow("Image with Points", winWidth, winHeight);
imshow("Image with Points", img_with_points);
waitKey(0);
destroyAllWindows();
return 0;
}03 结果展示
原始图像:

提取特征点叠加之后的图像:


















 1337
1337

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









