






目录
一、STM32以中断的方式点亮LED灯(标准库)
主要任务:用stm32F103核心板的GPIOA端一管脚接一个LED,GPIOB端口一引脚接一个开关(用杜邦线模拟代替)。采用中断模式编程,当开关接高电平时,LED亮灯;接低电平时,LED灭灯。
1.1、中断
1.1.1、定义
计算机在执行程序过程中,当出现异常情况(断电等)或特殊请求(数据传输等)时,计算机暂停现行程序的运行,转向对这些异常情况或特殊请求进行处理,处理完毕后再返回到现行程序的中断处,继续执行原程序,这就是“中断”。
中断在嵌入式系统中占有极其重要的地位,中断机制使得系统能更有效更合理的发挥效能和提高效能。
1.1.2、中断优先级与中断嵌套
中断优先级:当有多个中断源同时请求中断时,CPU会根据中断源的轻重缓急进行判断,优先响应更加紧急的中断源。
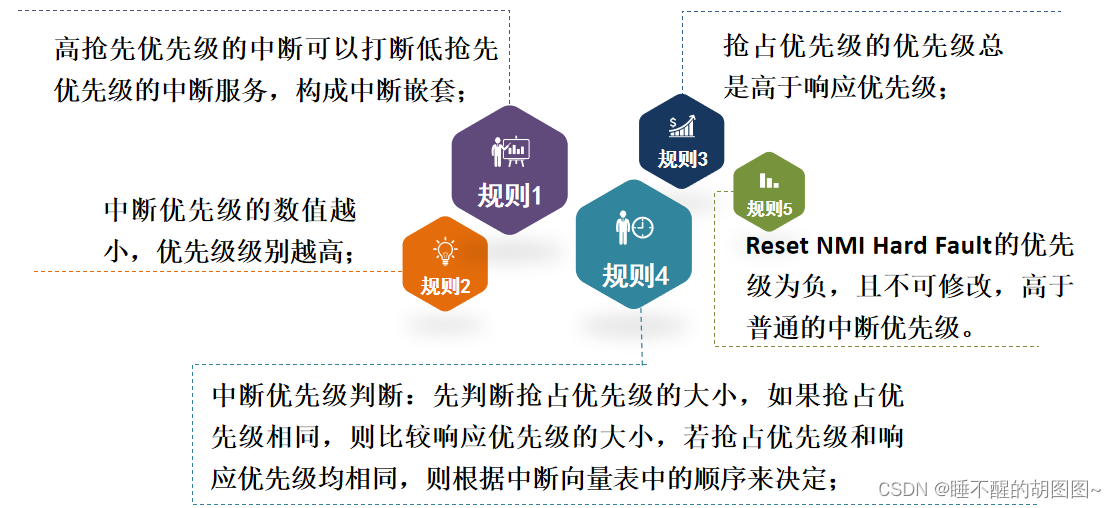
中断嵌套:当一个中断程序正在运行时,又有新的更高优先级的中断源申请中断,CPU再次暂停当前中断程序,转而去处理新的中断程序,处理完成后依次进行返回。
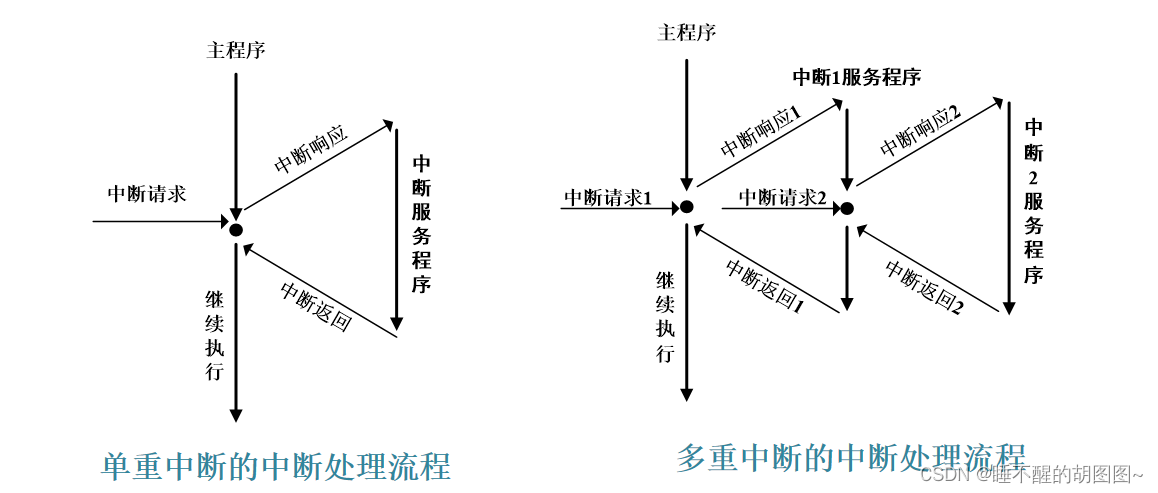
1.1.3、中断处理流程
中断处理流程:中断请求、中断响应、中断服务和中断返回
中断请求:中断请求是中断源向CPU发出中断请求信号,此时中断控制系统的中断请求寄存器被置位,向CPU请求中断。
中断响应:CPU的中断系统判断中断源的中断请求是否符合中断响应条件,如果符合条件,则暂时中断当前程序并控制程序跳转到中断服务程序。
中断服务:为处理中断而编写的程序称为中断服务程序,是由开发人员针对具体中断所要实现的功能进行设计和编写的,需要由开发人员来实现。
中断返回:CPU退出中断服务程序,返回到中断请求响应之前被中止的位置继续执行主程序。这部分操作同样由硬件来实现,不需要开发人员进行处理。
1.1.4、STM32与中断
STM32的内部中断处理机制:
(一)STM32中断优先级:
STM32使用Cortex-M3的8位优先级寄存器中的4位来配置中断优先级,即STM32中的NVIC只支持16级中断优先级的管理。
NVIC中断配置的相关函数存放在标准外设库misc.c和misc.h文件中,共定义了5个相关函数及NVIC初始化结构体。
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup);
void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct);
void NVIC_SetVectorTable(uint32_t NVIC_VectTab, uint32_t Offset);
void NVIC_SystemLPConfig(uint8_t LowPowerMode, FunctionalState NewState);
void SysTick_CLKSourceConfig(uint32_t SysTick_CLKSource);
中断分组管理函数:
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup)
用于设置中断的优先级分组,此函数只有一个参数NVIC_PriorityGroup,其取值共有5组,每组的抢占优先级和响应优先级所占位数均不同,取值范围不同。
| NVIC_PriorityGroup | 抢占优先级 取值范围 | 响应优先级 取值范围 | 描述 |
| NVIC_PriorityGroup_0 | 0 | 0~15 | 抢占优先级占0位, 响应优先级占4位 |
| NVIC_PriorityGroup_1 | 0,1 | 0~7 | 抢占优先级占1位, 响应优先级占3位 |
| NVIC_PriorityGroup_2 | 0,1,2,3 | 0,1,2,3 | 抢占优先级占2位, 响应优先级占2位 |
| NVIC_PriorityGroup_3 | 0,1,2,3,4,5,6,7 | 0,1 | 抢占优先级占3位, 响应优先级占1位 |
| NVIC_PriorityGroup_4 | 0~15 | 0 | 抢占优先级占4位, 响应优先级占0位 |
中断初始化函数(设置抢占优先级和响应优先级):
void NVIC_Init(NVIC_InitTypeDef * NVIC_InitStruct)
指向NVIC_InitTypeDef结构体的指针:
typedef struct
{
uint8_t NVIC_IRQChannel;//配置中断源,IRQ通道
uint8_t NVIC_IRQChannelPreemptionPriority; //配置抢占优先级
uint8_t NVIC_IRQChannelSubPriority; //配置响应优先级
FunctionalState NVIC_IRQChannelCmd; //使能中断通道
} NVIC_InitTypeDef;
中断优先级的判断原则:
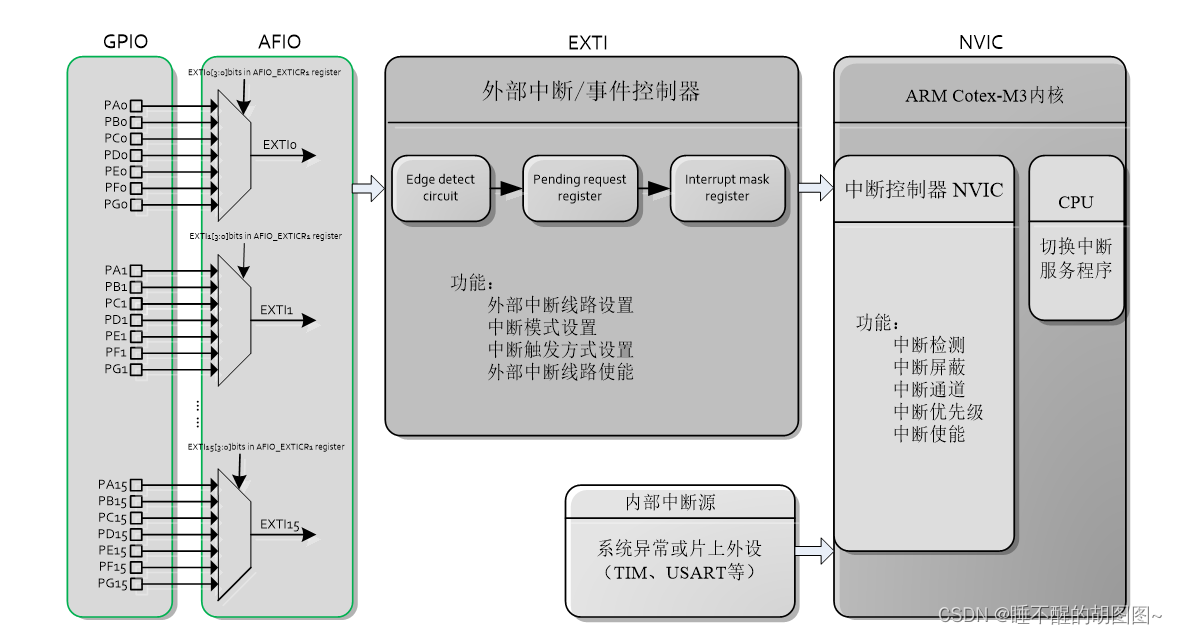
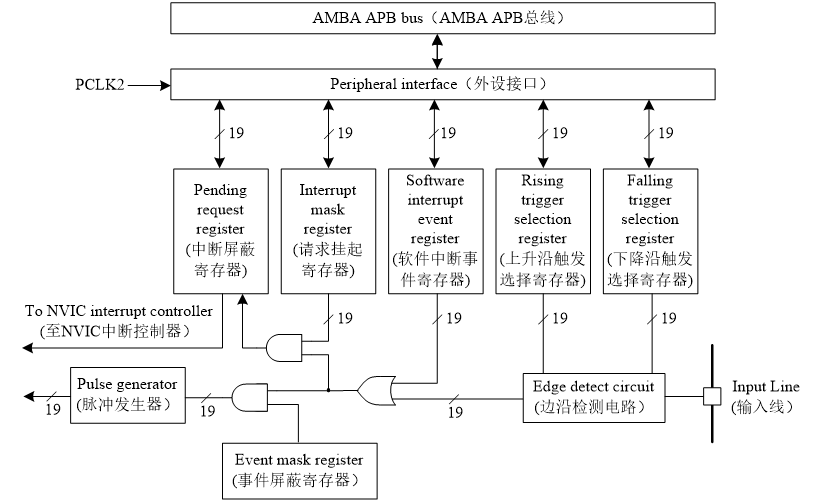
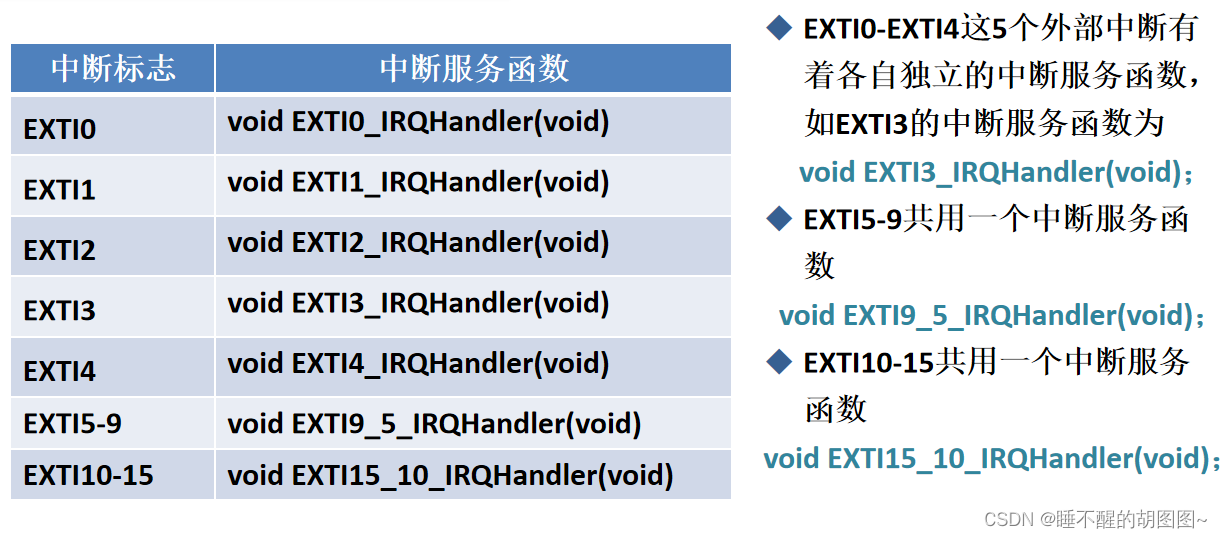
(二)STM32外部中断EXTI
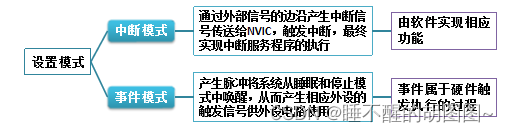
EXTI(External interrupt/event controller,外部中断/事件控制器)支持19个外部中断/事件请求,每个中断/事件都有独立的触发和屏蔽设置,具有中断模式和事件模式两种设置模式。 STM32芯片之外的外设的中断(I/O端口)由EXTI和NVIC共同负责,即STM32的每一个GPIO引脚都可以配置成一个外部中断触发源。
STM32 EXTI内部功能图:
STM32中,每一个GPIO都可以触发一个外部中断。
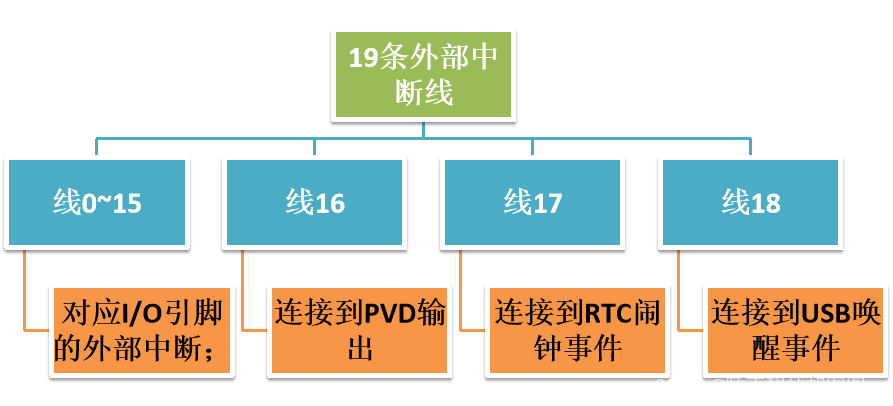
GPIO的中断是以组为单位的,同组的外部中断公用一条外部中断线。 例如:PA0、PB0、PC0、PD0、PE0、PF0、PG0这些为一组,如果使用PA0作为外部中断源,那么PB0、PC0、PD0、PE0、PF0、PG0就不能同时再作为外部中断使用了,在此情况下,只能使用类似于PB1、PC2这种末端序号不同的外部中断源。
1.2、具体过程
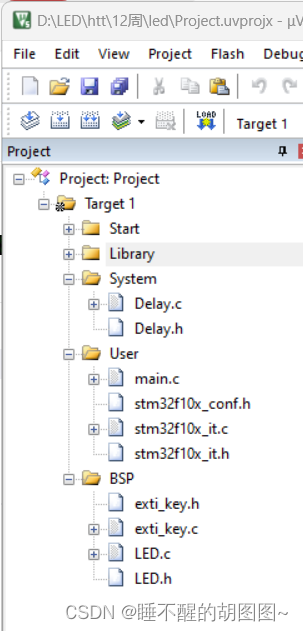
1.2.1、keil搭建项目
1.2.2、代码实现
(一)配置RCC,把涉及到的外设的时钟全部打开
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //打开GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //打开AFIO时钟
//EXTI 和 NVIC已经默认开启时钟,不需要再开启
(二)配置GPIO,选择端口为输入模式(GPIOB14号引脚)
GPIO_InitTypeDef GPIO_InitStruct;//定义配置初始化结构体
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING; //对于外部中断来说,要选择浮 空,上拉或者下拉输入其中一个模式,如果不清楚看ST参考手册GPIO外设配置表(113页EXTI输入线)
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_14;//我们
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStruct);
(三)、配置AFIO,选择我们用的GPIO连接到后面EXTI
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource14);//用AFIO配置需要的中断引脚选择
(四)、配置EXTI,选择触发方式(例如上升沿,下降沿或双边沿),触发响应方式(中断或者事件触发)
EXTI_InitTypeDef EXTI_InitStruct;
EXTI_InitStruct.EXTI_Line = EXTI_Line14;//选择PB14对应的14号线路;
EXTI_InitStruct.EXTI_LineCmd = ENABLE;//开启中断
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;//选择是中断还是事件触发
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Rising_Falling;//配置为下降沿触发
EXTI_Init(&EXTI_InitStruct);
(五)、配置NVIC,给外设配置合适的优先级,最后通过NVIC中断信号进入CPU
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//先配置一下指定中断分组(这里选择抢占优先级和响应优先级)
NVIC_InitStruct.NVIC_IRQChannel = EXTI15_10_IRQn;//这里参数需要到整个文件搜索,不同类型的芯片终端通道列表不一样,选择MD的芯片找到10-15EXTI的通道
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
//指定优先级,因为只有一个中断源,优先级随意设置
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1; //指定抢占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1; //指定响应优先级
NVIC_Init(&NVIC_InitStruct);
(六)、LED.c
#include "stm32f10x.h" // Device header
uint16_t LED_Count;//计数器(中断触发次数)
void LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;//定义配置初始化结构体
EXTI_InitTypeDef EXTI_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //打开GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //打开AFIO时钟
//EXTI 和 NVIC已经默认开启时钟,不需要再开启
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING; //对于外部中断来说,要选择浮空,上拉或者下拉输入其中一个模式,如果不清楚看ST参考手册GPIO外设配置表(113页EXTI输入线)
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStruct);
//第三步,给AFIO配置,库函数文件在GPIO一个文件里
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource14);//用AFIO配置需要的中断引脚选择
//第四步配置EXTI,选择触发的方式
EXTI_InitStruct.EXTI_Line = EXTI_Line14;//选择PB14对应的14号线路;
EXTI_InitStruct.EXTI_LineCmd = ENABLE;//开启中断
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;//选择是中断还是事件触发
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Rising_Falling;//配置为下降沿触发
EXTI_Init(&EXTI_InitStruct);
//第五步,配置NVIC(NVIC属于内核,库函数需要在杂项即misc.h里寻找)
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//先配置一下指定中断分组(这里选择抢占优先级和响应优先级)
NVIC_InitStruct.NVIC_IRQChannel = EXTI15_10_IRQn;//这里参数需要到整个文件搜索,不同类型的芯片终端通道列表不一样,选择MD的芯片找到10-15EXTI的通道
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
//指定优先级,因为只有一个中断源,优先级随意设置
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1; //指定抢占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1; //指定响应优先级
NVIC_Init(&NVIC_InitStruct);
}
//第六步写中断函数(在启动文件startup里面找,找对应之前开启的10-15通道)
void EXTI15_10_IRQHandler(void)//必须无参无返回值
{
//因为有10-15EXTI都能进来所以一般首先要进行判断EXTI14的中断标志位是不是为1
if(EXTI_GetITStatus(EXTI_Line14)== SET)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_14)==Bit_RESET)//判断现在是低电平还是高电平,对应开关等
{
GPIO_SetBits(GPIOA,GPIO_Pin_5);
//GPIO_ResetBits(GPIOA,GPIO_Pin_5);
}
else if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_14)==Bit_SET)
{
//GPIO_SetBits(GPIOA,GPIO_Pin_5);
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
}
//每次执行中断后都应该清除中断标志位,不然会一直申请中断,程序就卡死在中断里面
EXTI_ClearITPendingBit(EXTI_Line14);
}
}
(七)LED.h
#ifndef _LED_H
#define _LED_H
void LED_Init(void);
#endif(八)main.c
#include "stm32f10x.h" // Device header
#include "LED.h"
int main(void)
{
LED_Init();
while(1)
{
}
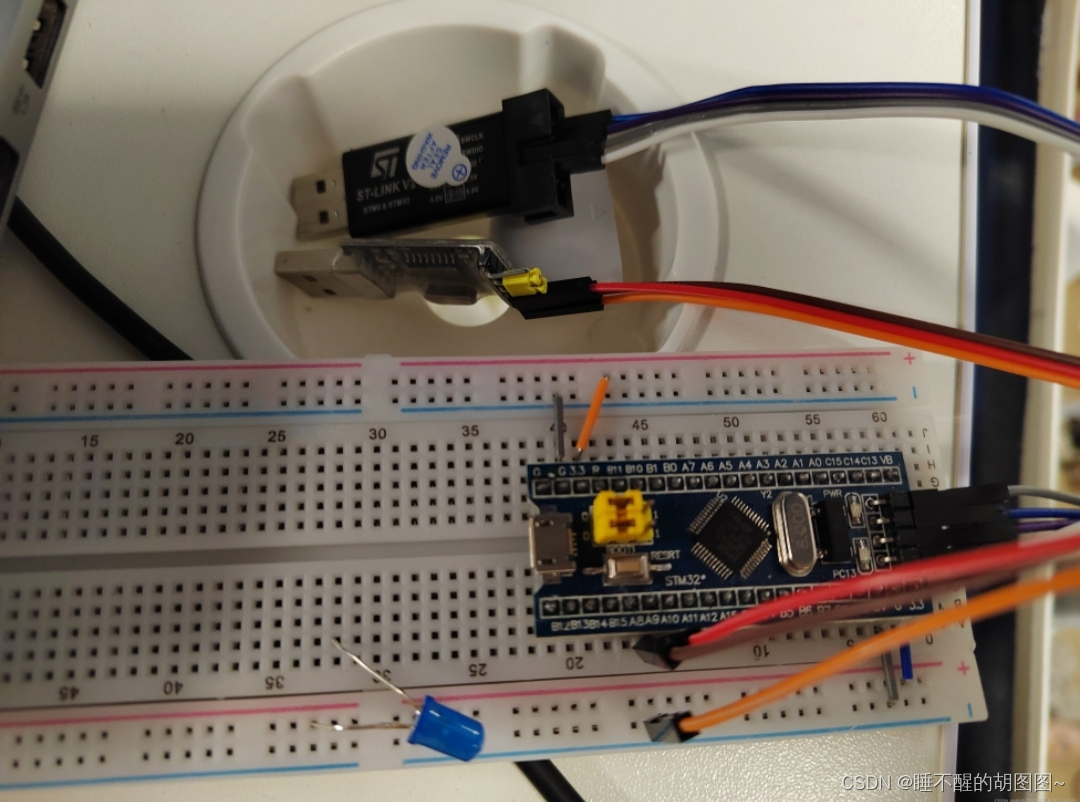
} 1.2.3、面包板点亮LED灯
二、串口中断发送信息
2.1、实验1
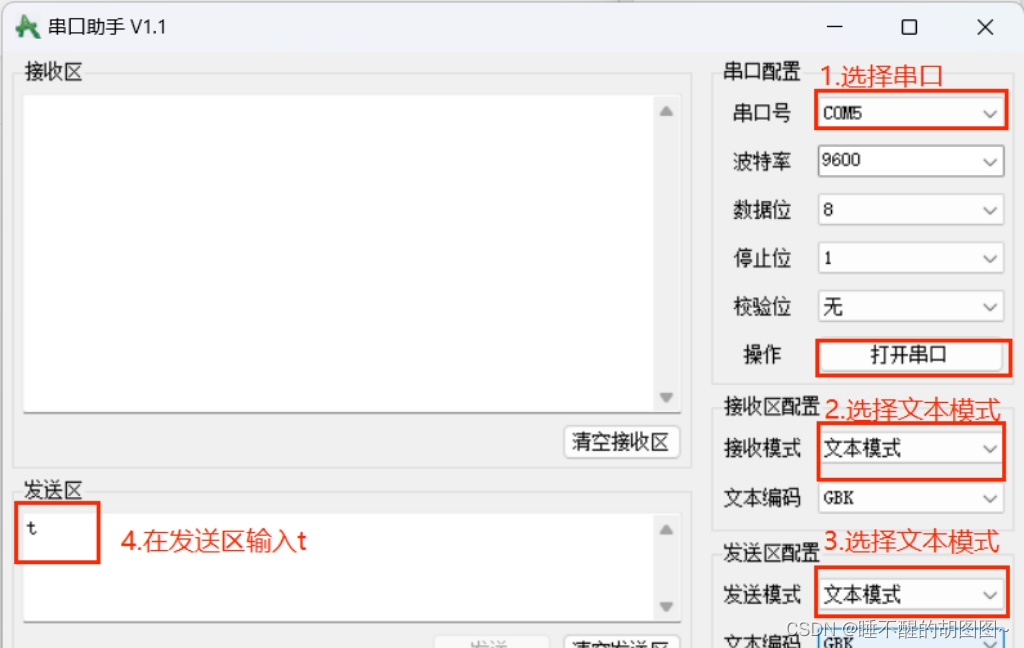
当stm32接收到1个字符“s”时,停止持续发送“hello windows!”; 当接收到1个字符“t”时,持续发送“hello windows!”(采用一个全局标量做信号灯);
2.1.1、具体实现代码
main.c
#include "stm32f10x.h"
#include "misc.h"
#include <string.h>
volatile uint8_t send_enabled = 0; // 全局变量,控制发送行为
void USART_Configuration(void) {
USART_InitTypeDef USART_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
// 打开 GPIO 与 USART 端口的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
// 配置 USART1 Tx (PA.09) 为复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 配置 USART1 Rx (PA.10) 为浮空输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 配置 USART 参数
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
// 使能 USART
USART_Cmd(USART1, ENABLE);
// 使能接收中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
// 配置 NVIC
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void USART1_IRQHandler(void) {
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {
char data = USART_ReceiveData(USART1);
if(data == 's') { // 接收到 's' 停止发送
send_enabled = 0;
} else if (data == 't') { // 接收到 't' 开始发送
send_enabled = 1;
}
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
void Delay(__IO uint32_t nCount) {
for(; nCount != 0; nCount--);
}
int main(void) {
SystemInit();
USART_Configuration();
char *str = "hello windows!\r\n";
while(1) {
if(send_enabled) {
for(uint32_t i = 0; i < strlen(str); i++) {
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1, str[i]);
}
}
Delay(5000000);
}
}
2.1.2、烧录效果
2.2、实验2
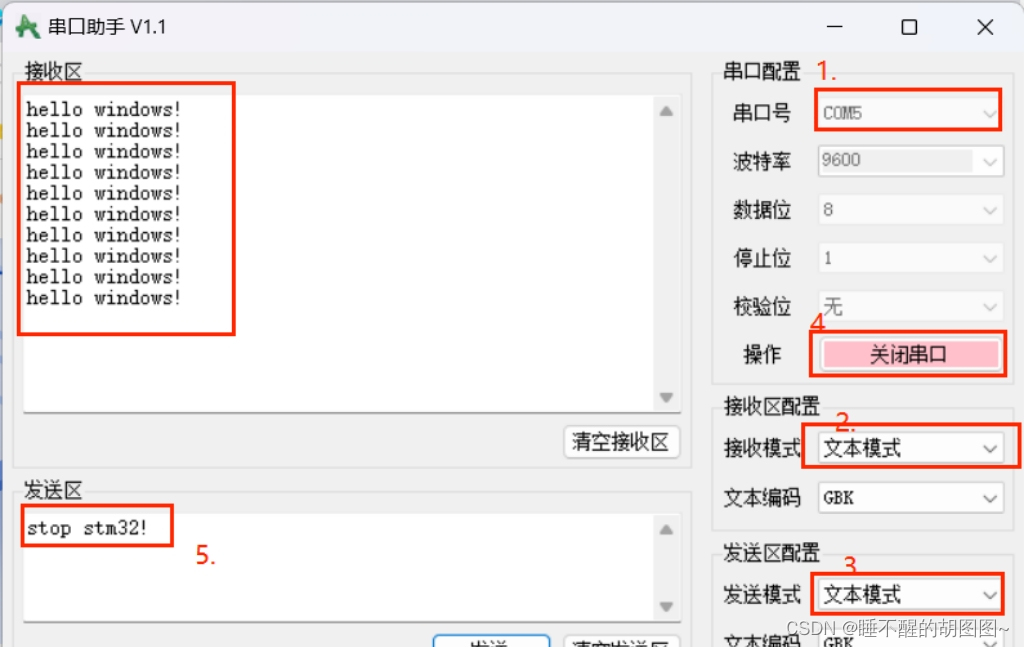
当stm32接收到字符“stop stm32!”时,停止持续发送“hello windows!”; 当接收到字符“go stm32!”时,持续发送“hello windows!”(要将接收到的连续字符保存到一个字符数组里,进行判别匹配。写一个接收字符串的函数。
2.2.1、具体代码实现
#include "stm32f10x.h"
#include "misc.h"
#include <string.h>
#define BUFFER_SIZE 100
volatile char buffer[BUFFER_SIZE];
volatile int buffer_index = 0;
volatile int send_enabled = 0;
void Delay(__IO uint32_t nCount) {
for (; nCount != 0; nCount--);
}
void USART_Configuration(void) {
USART_InitTypeDef USART_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
// USART Tx (PA.09) 配置为复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// USART Rx (PA.10) 配置为浮空输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 开启接收中断
USART_Cmd(USART1, ENABLE);
}
void NVIC_Configuration(void) {
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void USART1_IRQHandler(void) {
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {
char data = (char)USART_ReceiveData(USART1);
if (buffer_index < BUFFER_SIZE - 1) {
buffer[buffer_index++] = data;
buffer[buffer_index] = '\0'; // 保持字符串结尾
char* temp_buffer = (char*)buffer; // 创建一个非 volatile 指针
if (strstr(temp_buffer, "stop stm32!") != NULL) {
send_enabled = 0;
buffer_index = 0; // 清空缓冲区
} else if (strstr(temp_buffer, "go stm32!") != NULL) {
send_enabled = 1;
buffer_index = 0; // 清空缓冲区
}
}
}
}
int main(void) {
SystemInit();
USART_Configuration();
NVIC_Configuration();
char *str = "hello windows!\r\n";
while (1) {
if (send_enabled) {
for (uint32_t i = 0; i < strlen(str); i++) {
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1, str[i]);
}
}
Delay(5000000);
}
}
2.2.2、烧录效果
三、总结
此次我们学习了用串口中断的方式点亮LED灯,同时用串口中断的方式重做了前一篇文章信息发送的实验。对我个人来说整个过程还是比较复杂难做的,本次学习也进一步强化了我的动手能力。文章多有不足,欢迎大家批评指正!

















 8906
8906

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









