







启发
目前Transformer应用的领域及其广泛,NLP不用提,CV,Audio Generate方面也是大放异彩,原本博主对transformer只是一知半解,大致了解算法内容,有Encoder,Decoder,还有一些attention的Q、K、V的细节,不过在不断地学习中发现,学习transformer的源码更能够去理解目前先进算法的原理,因此主动去了解了一下transformer的源码细节,这里记录一下学习过程的笔记。
基本结构
如图,transformer实际上就是图上这个玩意儿,看上去东西不多,实际实现细节还挺麻烦。
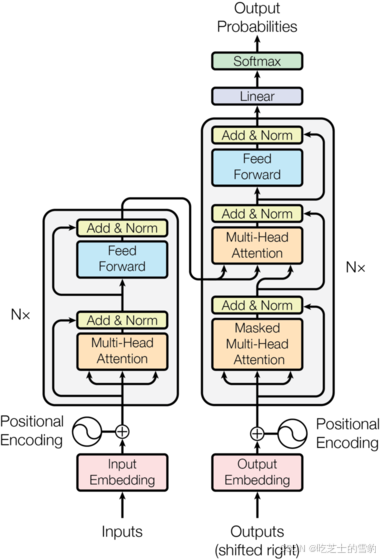
首先在打源码之前还是得看看基本架构,也就是我们需要实现什么。
通过图中最下面部分我们就能知道,inputs和outputs在进入我们的大模块前,都经过了一个embedding层,这个词嵌入和位置嵌入的知识点,可以网络搜索一下,了解一下即可。所以我们需要实现一个对我们的seq进行embedding的模块。
随后往上面看,有一个加号,那里是我们的Positional Encoding,也就是位置编码层,这是另一个模块。
再往上看,发现没有,左边的inputs对应的是N个大模块,每个大模块里面还有两个小模块。
右边的outputs对应的也是N个大模块,每个大模块里有三个小模块。
两边都看过了,我们现在看左边,为什么先看左边,我们肯定是要从输出层看起,不能吃着碗里的,看着锅里的哈。
左边我们来跟着线进去哈,发现什么,一条线散开了!四条线!,不过还好,最左边那个线我们有过深度学习基础的同学都知道,叫做short-cut,也叫residual value, 也就是残差, 这里不细讲。既然是残差,我们就要实现啊,所以这里也有一个模块。
中间三条线,我们对应着什么呢,来看Multi-Head Attention,这个是一个多头注意力机制模块,具体细节,大家看算法解读,源码解读这里不做赘述。好这个也是一个模块。
在向上,是不是有一个Add&Norm的模块,这个我们叫做Layer-Normalization, 层归一化,我们可以看出,是先norm再进行一个add,所以这个也要实现。
向上走,发现了一个Feed Forward层,这个是一个前馈神经网络,这个玩意儿主要做的是非线性变换,里面门道很多,对于初学者,知道即可。详细可以去看看算法详解。同时还包含一个shor-cut部分,这个也是一个模块。
继续往上走,发现还有一个Add&Norm的模块,与之前类似,所以就不说了。后续的short-cut部分,每一层都有,除了最后的输出层,因此不多加赘述。
好了,左边的看完了,我们来看右边的,右边的,往上面看,是不是与我们左边的第一层一样?只不过多了一个Masked,因此我们需要统一实现一个Multi-Head Attention,再在里面添加一个mask=None的参数来动态使用mask。这个模块可以和左边第一层的模块合并成一个。继续往上走,发现还有一个Add&Norm的模块,与之前类似。
在往上,我们这里有好多条线,甚至Encoder也来插了一脚,这个是什么,大家看过Transformer算法的都知道,这个是Cross-Attention,既将Encoder的特征表述层K、V放入Decoder中,然后将Decoder的Q放入,达到一个用tgt(Outputs)的Query查询Encoder中的表征,获取相似度。也就是让我们的tgt(这里简写,指代target,也就是outputs)对src(source,也就是inputs)进行查询,看看我们的最终答案跟Encoder中提取出来的特征的关系,并把得出来的关系建立在V上表达,这里不细说。继续往上走,发现还有一个Add&Norm的模块,与之前类似。
继续往上走,Feed Forward 和Add&Norm模块,都提到过了。
最后有一个Linear和SoftMax,这里学过深度学习图像部分的一些算法的,都知道我们这里再做一个分类任务,得到最终的结果,也不详细解释,因为该篇文章主要针对源码复现。
好了,说了这么多,一共有多少个模块?是不是挺多的,我们这里列下来,embedding,Positional Encoding, Multi-Head Attention,residual value,Add&Norm,Feed Forward
Cross-Attention,让我们按照顺序,一一实现吧!
分模块实现
Embedding
对于Embedding模块,torch.nn中为我们实现了该模块,因此简单调用一下即可。
对于代码,我在学习中遇到的一些注意点都加了注释。
对于Forward函数中的x, 这里提供一些思路, 我们需要预测序列是一堆seq, 这里假设batchsize是1, 我们输入到模型之前的seq类似于"i love you", 属于一个字符串的形式。
我们需要再单词表中传入seq,将seq变成一个torch的索引, 随便举例一个[2, 10, 15], 这是seq的索引,对于输入到模型中, 一般我们的要求是将seq转换为这样的示例
size(batch_size, seq_len, model_dim),这里的model_dim我们是在嵌入后才生成,因此传入到嵌入层之前我们的要有(batch_size, seq_len)的size才可以进入到embedding中,随后embedding干了一个什么事情呢,
他通过生成了vocab的索引之后,变成一个(vocab_size, model_dim)的词嵌入矩阵,然后我们利用seq中的索引到里面去找对应的向量,一个索引对应一个(model_dim)的向量, 也就是一个词对应的一个向量,model_dim属于向量空间,尽可能大一点会比较好,能够捕捉到更多的语义,语法,语境特征。
找到了就将对应的索引替换成(model_dim)的向量,最后我们从embedding层得到的是一个(1, 3, model_dim)的seq,1对应的批次,3对应我们有几个单词,model_dim对应我们一个单词所能蕴含的信息量大小。
最后的缩放因子不用管,都这么写,具体看论文。
class Embeddings(nn.Module):
def _init(self, vocab_size, d_model): # vocab_size: 词汇表大小,d_model: 词嵌入维度
super(Embeddings, self).__init__() # 继承父类的初始化方法,基本上都是这么写
self.lut = nn.Embedding(vocab_size, d_model)
# 这里类似于生成一个embedding矩阵,size为(vocab_size, d_model)
self.d_model = d_model
def forward(self, x):
return self.lut(x) * math.sqrt(self.d_model)
# 返回词嵌入矩阵乘以一个缩放因子,这个缩放因子是为了防止embedding之后的数值过大
Positional Encoding
上面实现了第一个模块的功能,也叫做词嵌入,但是我们得到一个词嵌入,并不能完全的知道整体的一个语境信息,例如:"我做了作业"和 “作业被我做了”, 这个是两个一样的事情,但是如果不加入我的具体位置,或者作业的具体位置,模型就只能够知道我后面可以预测出作业,而作业后面也能预测出我,可能会生成“作业做了我”这种荒唐的信息。 因此位置编码(Positional Encoding)至关重要。
这里博主没有细究位置编码的细节,而是通过github上的实现源码拿出来直接使用,有兴趣的小伙伴可以探究一下位置编码的公式细节。
class PositionalEncoding(nn.Module):
def __init__(self, d_model, dropout=0.1, max_len=5000):
super(PositionalEncoding, self).__init__()
self.dropout = nn.Dropout(p=dropout)
pe = torch.zeros(max_len, d_model) # 初始化一个(max_len, d_model)的矩阵
position = torch.arange(0, max_len).unsqueeze(1) # 生成一个(max_len, 1)的矩阵
div_term = torch.exp(torch.arange(0, d_model, 2) * -(math.log(10000.0) / d_model)) # 生成一个(d_model//2,)的矩阵
pe[:, 0::2] = torch.sin(position * div_term) # 偶数列
pe[:, 1::2] = torch.cos(position * div_term) # 奇数列
pe = pe.unsqueeze(0).transpose(0, 1) # (max_len, d_model) -> (1, max_len, d_model)
self.register_buffer('pe', pe) # 将pe注册为buffer,buffer是模型的一部分,但是不会被优化器更新
def forward(self, x):
x = x + self.pe[:x.size(0), :] # x.size(0)表示x的第0维的大小,这里是一个batch的大小
return self.dropout(x)LayerNorm
为什么我们这里先实现LayerNorm呢,因为LayerNorm在图中出现的次数非常高频,因此我们先实现它。
在学习中我对LayerNorm的理解更深层次,LayerNorm主要是对我们输入的seq的最后一个维度,既model_dim维度来进行计算,最后通过广播机制来实现统一的计算。
我们完成了LayerNorm后就可以完成残差和LayerNorm统一的大模块了,下一个模块会讲到。现在我们先完成LayerNorm。
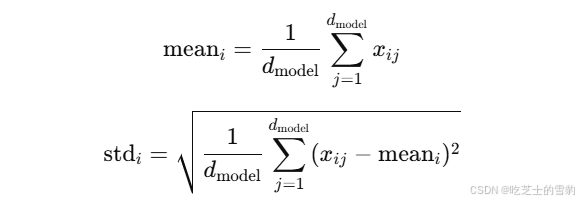
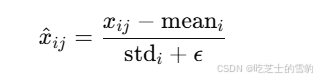
关于LayerNorm的公式,我放在这里,有兴趣的同学可以对着公式复现一遍代码。

class LayerNorm(nn.Module):
def __init__(self, features, eps=1e-6):
super(LayerNorm, self).__init__()
self.a_2 = nn.Parameter(torch.ones(features)) #features等价于model_dim
self.b_2 = nn.Parameter(torch.zeros(features))
self.eps = eps
# a_2和b_2是可学习的参数, a_2是缩放参数,b_2是平移参数
def forward(self, x):
mean = x.mean(-1, keepdim=True)
std = x.std(-1, keepdim=True)
return self.a_2 * (x- mean) / (std + self.eps) + self.b_2SubLayerConnection
这里更改了名字,官方代码中叫SublayerConnection,主要是用于我们上文中提到的short-cut操作,以及小模块的运行操作,既一个小模块+add&norm。
class SublayerConnection(nn.Module):
def __init__(self, size, dropout):
super(SublayerConnection, self).__init__()
self.norm = LayerNorm(size)
self.dropout = nn.Dropout(dropout)
def forward(self, x, sublayer):
return x + self.dropout(sublayer(self.norm(x)))学到这里博主就有个疑问,为什么要在Norm之后再来一个sublayer,明明sublayer中有norm操作。当时就查了相关资料,发现原来是在论文《Attention is All You Need》中提到过在每个子层中先利用LayerNorm再进行计算。具体可以去看论文。
实现了SublayerConnection,我们就方便的多了,因为基本上所有的模块都是基于该模块来实现的,只需要在该模块传入一个sublayer与x即可实现残差和Norm。
接下来需要来到我们的重头戏了,Self-Attention和Multi-Head Attention,建议读者先阅读相关算法详解再来阅读本文章。
Self - Attention
Self-Attention模块主要是通过注意力机制实现,具体算法在这里不仔细研究,主要研究代码如何复现。
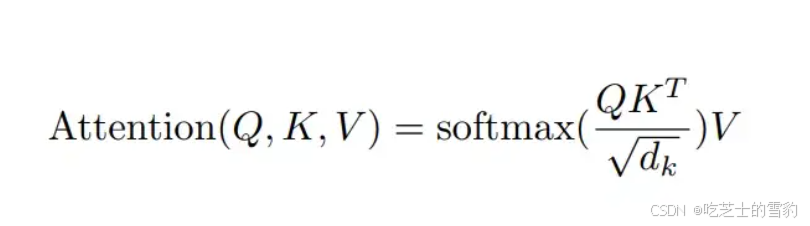
Attention主要是通过什么呢,Q、K、V来实现,既我们给每个序列都分配好了QKV的对应向量,然后来进行公式计算,每个QKV的shape是这个样子的(batch_size, seq_len, model_dim)。
计算score的公式如下,有了这个公式,Attention模块便可以很快实现。
def attention(query, key, value, mask=None, dropout=None):
d_k = query.size(-1)
scores = torch.matmul(query, key.transpose(-2, -1)) / np.sqrt(d_k)
if mask is not None:
scores = scores.masked_fill(mask == 0, 1e-9)
p_attn = scores.softmax(dim=-1)
if drop_out is not None:
p_attn = dropout(p_attn)
return torch.matmul(p_attn, value), p_attn在这段注意力机制中,有一个mask,也就是掩码,这个可以先不看,下面会讲关于mask的操作。
对于Attention机制中的QKV是如何得来的,我才开始也不太明白,只知道如何计算,后面经过一些查询和博主的视频,发现QKV初始其实都是与weight相乘得来的,随后模型不断地学习weight,为什么要学习weight,是需要weight进行不断地优化,让模型得到不一样的特征,Q学习到的是局部的查询特征,K学习到的是全局的特征,而V学习到的是上下文的依赖特征,因为综合了QK的权值结果。
Subsequent_mask
刚刚的自注意力机制中具有一个mask,mask是什么呢?
博主在学习过程中也有这个问题,因此去查询了相关资料,发现mask其实是transformer的一个特性,即只允许现在的看见过去的,而看不见未来的,这样就能让模型具有预测未来的性能。即单向预测。与BERT不同,BERT更像是做阅读理解,向里面填词。
mask的作用我们知道了,也就是挡住一部分,不让模型看到未来的信息。同时mask还能够做一件事,也就是挡住我们的padding。
为何要挡住padding?
在词嵌入中我们说过,输入的size是(batch_size, seq_len, model_dim)形式的,那么句子有长有短,我们总要找到最长的句子,或者找到一个差不多长度的句子,将它设置为我们句子的最大长度,超出的截断,小于的padding,达到我们序列统一。而padding,我们通用的是0来padding,因此padding不含我们的信息,也就是模型不需要去学习padding所蕴含的信息,所以这里需要mask掉padding。
而position的mask原文中没有实现,应该是在输入的时候实现的,即进入到模型之前,这里实现的是subsequent_mask。
def subsequent_mask(size): # 这里的size代表着序列的长度
attn_shape = (1, size, size)
subsequent_mask = torch.triu(torch.ones(attn_shape),diagonal=1).type(torch.uint8)
return subsequent_mask == 0
该段代码完成了对序列后续的mask,最后输出的mask是这样的,
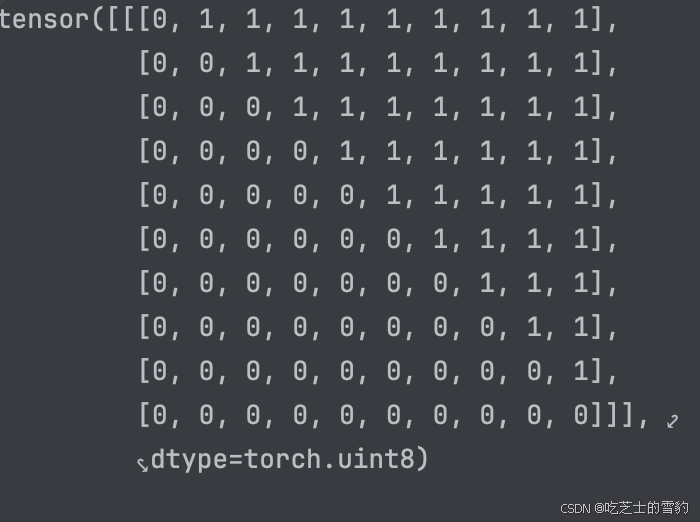
是一个三角矩阵,返回的mask == 0是一个翻转过来的三角矩阵,即0与1反转。
得到这个mask后,大家再去上面看看Attention的代码就可以理解mask的含义,在attn中我们利用Q与K转置相乘得到了一个scores,scores的size是(batch_size, seq_len, seq_len),对应着我们这边的size,通过广播机制,每一个batch都进行mask,即第一个位置只能影响到他自己,而第二个位置可以同时影响第一个和第二个,以此类推,最后一个位置可以全部都拿来加权求和。
Clone
在这里还要再来插入一个Clone模块,这个Clone模块主要实现了一个很小的功能,复制子层,N等于几就复制几个,用于多次进行模块的搭建。
def clone(modules, N):
return nn.ModuleList([copy.deepcopy(modules) for _ in range(N)])Multi-Head Attention
通过了这么多的模块预热,终于可以来实现目前来说最重要的一个模块,多头注意力机制了。
在学习中我才开始不知道这个多头注意力机制每个头对应的是什么,现在才发现每一个head对应的是一个seq的部分model_dim,通过N个head同时学习model_dim,能够达到更加细致的特征学习。该模块的基础是Attention,不同的是我们需要实现QKV的多维矩阵来实现该模块。
class MultiHeadAttention(nn.Module):
def __init__(self, h, d_model, dropout=0.1):
super(MultiHeadAttention, self).__init__()
assert d_model % h == 0
self.d_k = d_model // h
self.h = h
self.linears = clones(nn.Linear(d_model, d_model), N=4)
self.attn = None
self.dropout = nn.Dropout(p=dropout)
def forward(self, query, key, value, mask=None):
if mask is not None:
mask = mask.unqueeze(1)
nbatches = query.size(0)
query, key, value = [
lin(x).view(nbatches, -1, self.h, self.d_k).transpose(1, 2)
for lin, x in zip(self.linears, (query, key, value))
]
x, self_attn = attention(query, key, value, mask=mask, dropout=self.dropout)
x= (
x.transpose(1,2)
.contigous()
.view(nbatches, -1, self.h * self.d_k)
)
del query
del key
del value
self.linears[-1](x)这个模块的实现比较难以理解首先在模块初始化,
我们需要传入一些基础参数,如h-heads,d_model-seq中每个单词最后一维的大小,dropout-去除神经元的概率。 同时初始化时,需要确保我们的d_model可以被head整除,确保每个head分得同样的features,同时得到d_k。
这里还需要做四个linear来为QKV做线性变换,最后一个linear用来储存计算出的权重结果。
在Forward函数中不好理解是一个zip的列表推导式,这里需要python基础非常扎实,zip返回出的是一个linear和对应的QKV,由于广播机制,最后一个Linear不会被提取出来。
提取出的Linear分别对QKV做线性变换,这样我们就可以通过view来更改空间维度,也就是(nbatches, seq_len, head, d_k),这样每个头就有自己对应的d_k了,不过多头注意力机制的核心是多头!也就是采用并行计算机制,所以head和seq_len需要进行维度交换,否则无法传入到Attention模块进行计算。
这里我当时有些不理解,不过仔细想一下,如果是简单的单头自注意力机制采用的size是(batch_size, seq_len, d_model), 如果是多头,肯定不能替换掉seq_len,因为一个头要计算整个单词序列中的一部分特征,所以head应该在seq_len之前。
拿到了对应的QKV后就可以进行Attention计算了,传入参数,得到两个返回,第一个返回是softmax后再与V相乘得到的特征,第二个是softmax后的得分值。
随后我们就可以得到新一轮的特征,经过最后一个Linear线性变换返回。
PointwiseFeedForward
前馈神经网络,对与前馈神经网络,我最开始也不太理解,在图像分类中或者语义分割中,有些模型拿它进行一个特征展平,再进行特征缩小,知道缩小到需要的类目数量,不过在这里前馈神经网络做了一个特征空间的放大,让模型能够学习融合到更多的信息,再进行特征缩小,回到原来的维度大小,这样做的好处一个是加速模型的训练和计算,另一个是可以增强模型的特征学习。
class PointwiseFeedForward(mm.Module):
def __init__(self, d_model, d_ff, dropout=0.1)
super(PointwiseFeedForward, self).__init__()
self.w_1 = nn.Linear(d_model, d_ff)
self.w_2 = nn.Linear(d_ff, d_model)
self.dropout = nn.Dropout(dropout)
def forward(self, x)
return self.w_2(self.dropout(F.relu(self.w_1(x))))现在我们基本的小模块都做完了,还剩几个大模块,比如EncoderLayer,DecoderLayer,Encoder,Decoder,Encoder_Decoder,这个几个大模块,让我们来看看如何搭建。
EncoderLayer
class EncoderLayer(nn.Module):
def __init__(self, size, self_attn, feed_forward, dropout)
super(EncoderLayer, self).__init__()
self.attn = self_attn
feed_forward = feed_forward
self.sublayer = clones(SublayerConnection(size, dropout), 2)
self.size = size
def forward(self, x, mask):
x = self.sublayer[0](x, lambda x: self.self_attn(x, x, x, mask))
return self.sublayer[1](x, self.feed_forward)这里博主在学习的时候也有点小问题,第一个问题就是这个size,由于表示不明确,总是容易将size搞混,不过目前出现的size,无论是在LayerNorm中的features还是这里的size,都代表着d_model,也就是每个词嵌入的向量的维度。
第二个问题就是sublayer的传入参数问题,这个可以详细搜一下lambda回调函数,在SublayerConnection中我们传入的是(x,sublayer),sublayer就是一个子层的意思,那么在一个子层我们应该传入attn模块,来实现多头注意力机制,不过多头注意力机制需要的是四个参数,
(query, key, value, mask), 我们直接传入attn函数的话,在SublayerConnection中也无法传入四个参数,只能传入一个norm(x),因此这里利用lambda回调,设置参数,既将norm(x),作为参数提前设置好,再传入当前的mask就可以了。
第二个sublayer子层就是做了一个FFN的操作。
得到了EncoderLayer,我们就要开始实现Encoder这个大模块了。
Encoder
Encoder说白了就是把一堆小模块拼在一起就可以了,其中的norm操作 我们先前也说了,在任何操作如注意力、FFN之前都需要进行一个LayerNorm的操作。
class Encoder(nn.Module):
def __init__(self, layers, N):
super(Encoder).__init__()
self.layers = clone(layers, N)
self.norm = LayerNorm(layers.size)
def forward(self, x, mask):
for layer in self.layers:
x = layer(x, mask)
return self.norm(x)DecoderLayer
终于说到DecoderLayer了,关于Decoder部分,包含初始的自注意力和中间的交叉注意力,然后是最后的FFN层,所以我们就按照这个顺序来搭建一下Layer部分。
class DecoderLayer(nn.Module):
def __init__(self, size, self_attn, src_attn, feed_forward, dropout):
super(DecoderLayer, self).__init__()
self.size = size
self.self_attn = self_attn
self.src_attn = src_attn
self.feed_forward = feed_forward
self.sublayer = clones(SublayerConnection(size, dropout), 3)
def forward(self, x, memory, src_mask, tgt_mask)
m = memory
x = self.sublayer[0](x, lambda x: self.self_attn(x, x, x, tgt_mask))
x = self.sublayer[1](x, lambda x: self.self_attn(x, m, m, tgt_mask))
return self.sublayer[2](x, lambda x: self.feed_forward(x))
这里依旧利用的lambda函数。
Decoder
Decoder与Encoder类似,都是定义layers来clone N个残差归一块,再传入对应的参数来初始化。
class Decoder(nn.Module):
def __init__(self, layer, N)
super(Decoder, self).__init__()
self.layers = clones(layer, N)
self.norm = LayerNorm(layer.size)
def forward(self, x, memory, src_mask, tgt_mask)
for layer in self.layers:
x = layer(x, memory, src_mask, tgt_mask)
return self.norm(x)Generator
我们做完了Encoder,Encoder传入到Decoder,再来做Decoder,最后得到的输出还需要经过线性层,根据不同的任务,线性层的维度含义不同。
class Generator(nn.Module):
def __init__(self, d_model, vocab):
super(Generator, self).__init__()
self.proj = nn.Linear(d_model, vocab)
def forward(self, x):
return F.log_softmax(self.proj(x), dim=-1)EncoderDecoder
最后一步!终于可以登顶了,在搭建了这么多的小模块,中间层,大模块之后,我们终于可以把所有的模块全部都整合到一起了。
class EncoderDecoder(nn.Module):
def __init__(self, encoder, decoder, src_embd, tgt_embd, generator):
super(EncoderDecoder, x).__init__()
self.encoder = encoder
self.decoder = decoder
self.src_embed = src_embed
self.tgt_embed = tgt_embed
self.generator = generator
def forward(self, src, tgt, src_mask, tgt_mask):
memory = self.encode(src, src_mask)
res = self.decode(memory, src_mask, tgt, tgt_mask)
return res
def encode(self, src, src_mask):
src_embedds = self.src_embed(src)
return self.encoder(src_embedds, src_mask)
def decode(self, memory, src_mask, tgt, tgt_mask):
target_embedds = self.tgt_embed(tgt)
return self.encoder(target_embedds, memory, src_mask, tgt_mask)
这里我的理解就是综合了所有的EncoderDecoder功能,但是都没有进行初始化,既还未传入一些基础的参数。主要的功能是链接了EncoderDecoder。
MakeModel
我们还需要一个方法来初始化这个模型,就跟我们以前搭建CNN的分类或者分割模型一样,最后需要传入对应的参数来初始化EncoderDecoder这个类,来完成整个模型。
def make_model(src_vocab, tgt_vocab, N=6, d_model=512, d_ff=2048, h=8, dropout=0.1):
c = copy.deepcopy
attn = MultiHeadAttention(h, d_model)
ff = PointwiseFeedForward(d_model, d_ff)
position = PositionalEncoding(d_model, dropout)
model = EncoderDecoder(
Encoder(EncoderLayer(d_model, c(attn), c(ff), dropout), N),
Decoder(DecoderLayer(d_model, c(attn), c(attn), c(ff), dropout), N),
nn.Sequential(Embeddings(d_model, src_vocab), c(position)),
nn.Sequential(Embeddings(d_model, tgt_vocab), c(position)),
Generator(d_model, tgt_vocab),
)
for p in model.parameters():
if p.dim() > 1 :
nn.init.xavier_uniform_(p)
return model在这里具体的Transformer源码就告一段落了,具体的代码细节可能有所疏忽,本文仅供交流学习,不做为官方参考,需要官方源码的,哈佛大学实现网址在这里:The Annotated Transformer,具体如何使用Transformer先跑起来一个样例,咱们下一篇再说。

















 625
625

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









