






1.使用在计算机平台的zed-ros-wrapper 编译安装
由于sdk版本不匹配,3.*与4.*名称更新不同,所以不可以
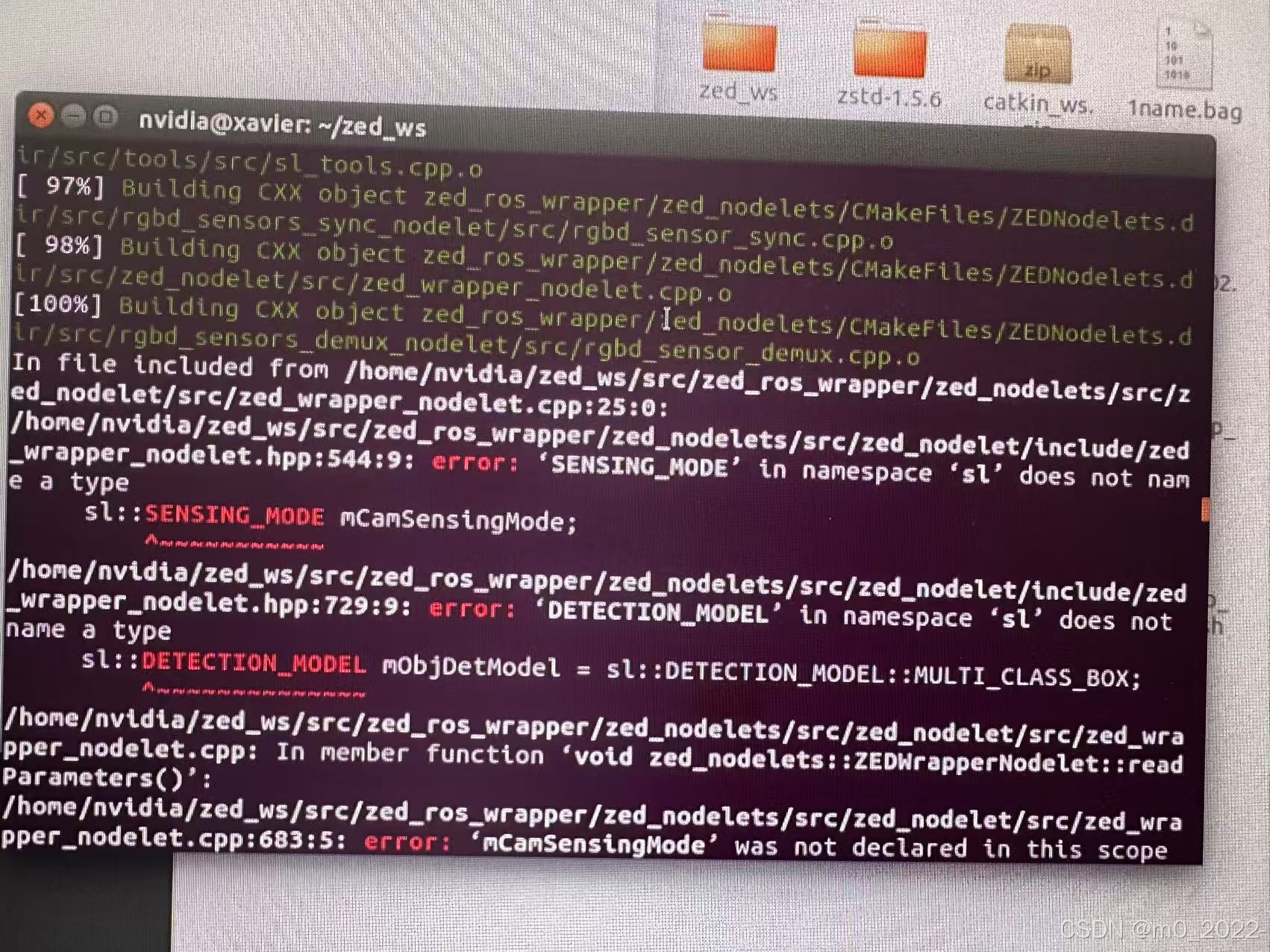
2.选择下载4.*版本的zed-ros-wrapper文件
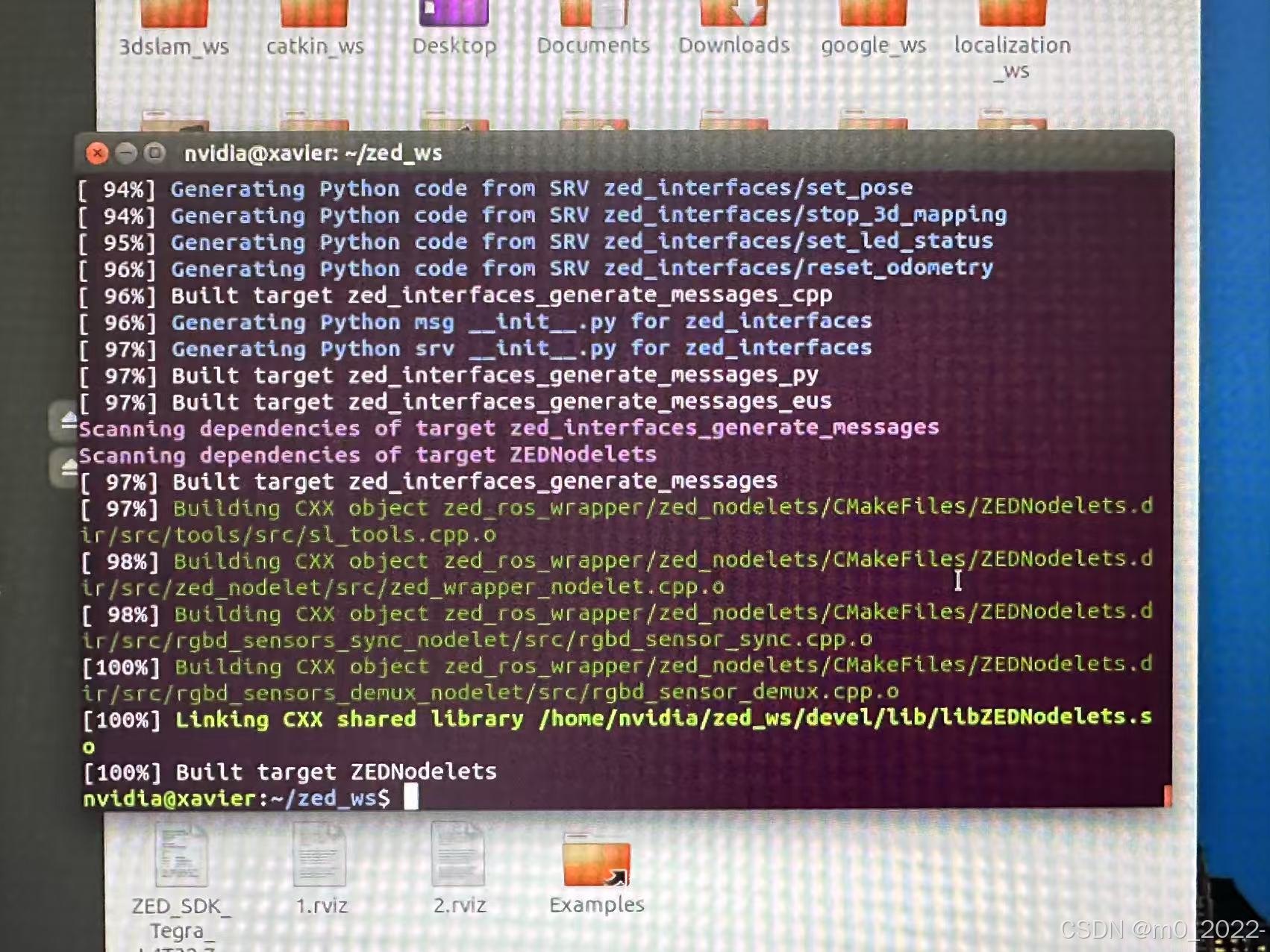
重新进行编译,安装
在/zed_ws/src路径下
rosdep install --from-paths src --ignore-src -r -y接着直接进行编译
catkin_make -DCMAKE_BUILD_TYPE=Release编译成功
编译成功以后 更新一下
source ~/zed_ws/devel/setup.bash打开ros驱动测试
roslaunch zed_wrapper zed2i.launch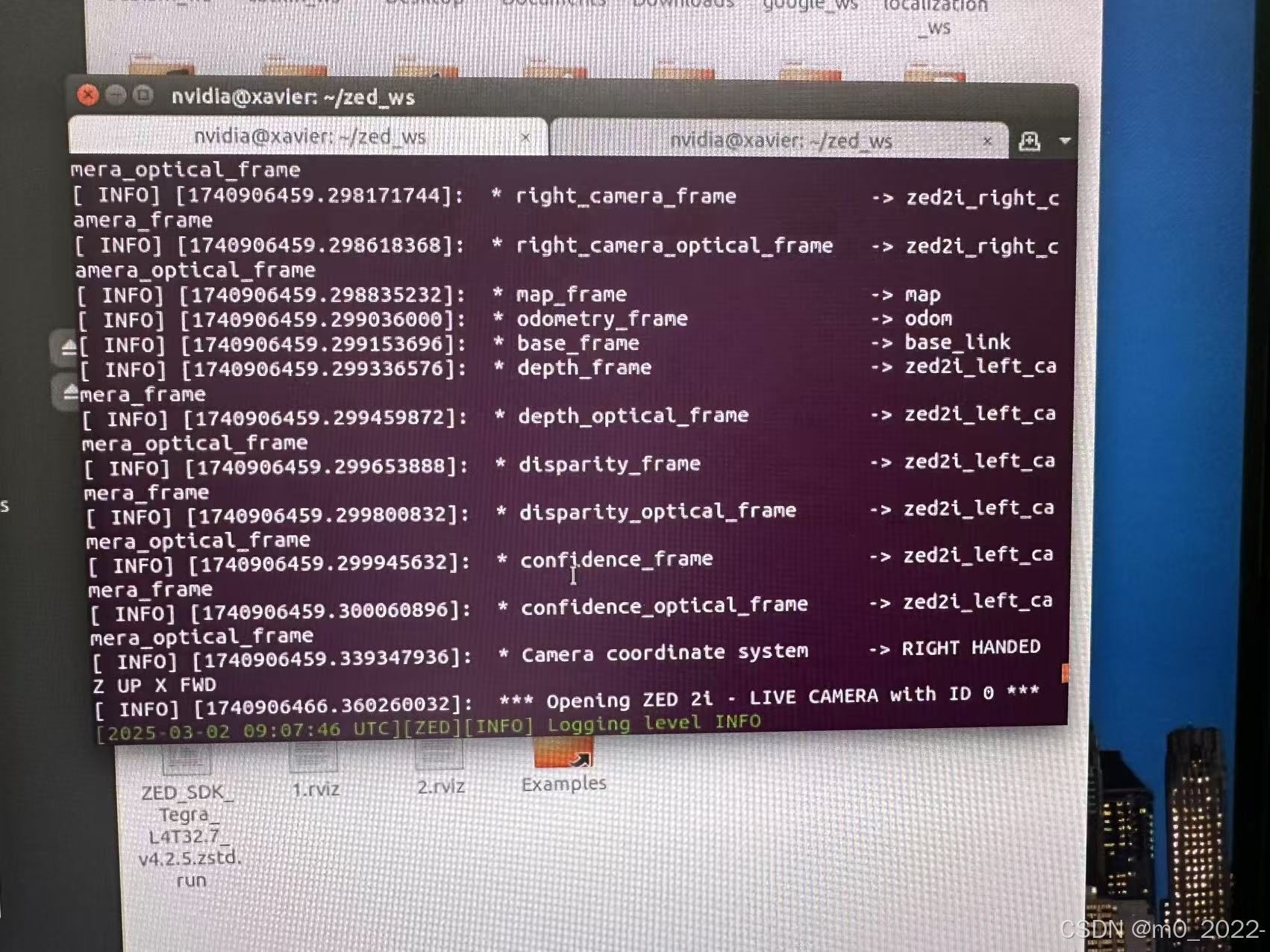


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









