






目录
1.CMOS(Complementary Metal Oxide Semiconductor):互补金属氧化物半导体
6.光子(Photon)与量子效率quantum efficiency
13.Electronic shutter: rolling shutter VS global shutter
1.CMOS(Complementary Metal Oxide Semiconductor):互补金属氧化物半导体
在成像系统中所属的位置如下:
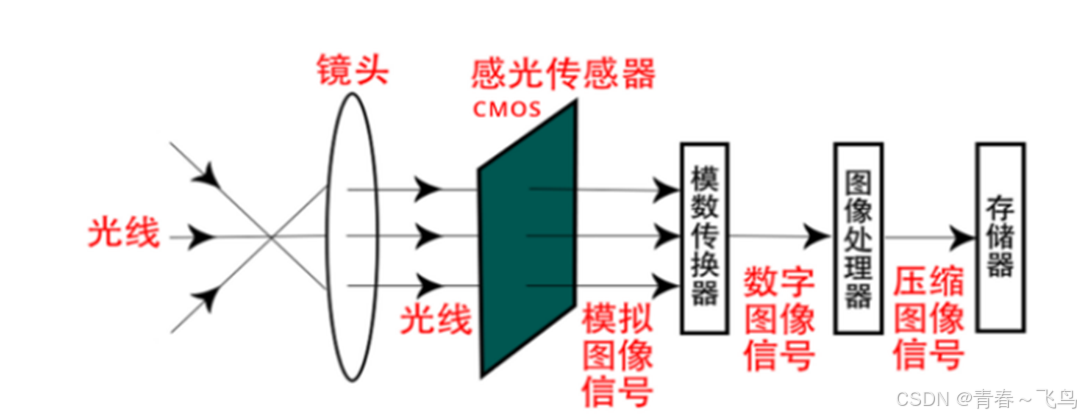
2.CMOS sensor stack
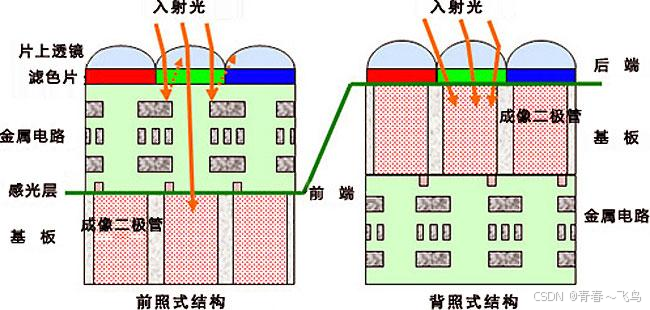
目前sensor的两种设计类型是:前照式 FSI(Front side illumination)和背照式 BSI(Back side illumination):
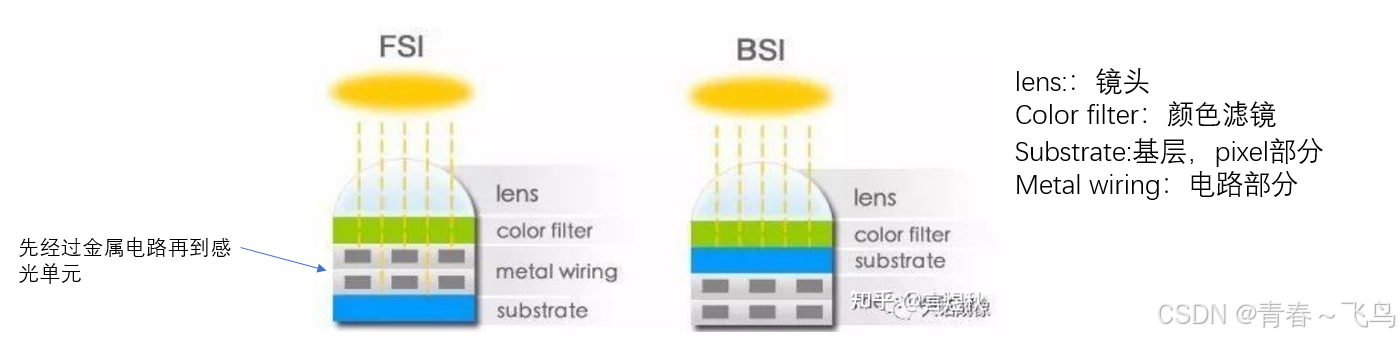
BSI的优势:
- 在光入射的过程中由于不会经过metal wiring部分,就不会有遮挡光线的存在。
- 光电二极管可以接收到更多光线(开口率更大),使 CMOS 具有更高灵敏度和信噪比,改善高 ISO 下的成像质量。
- 配套电路无需再和光电二极管争抢面积,更大规模的电路有助于提高速度,实现超高速连拍、超高清短片拍摄等功能。
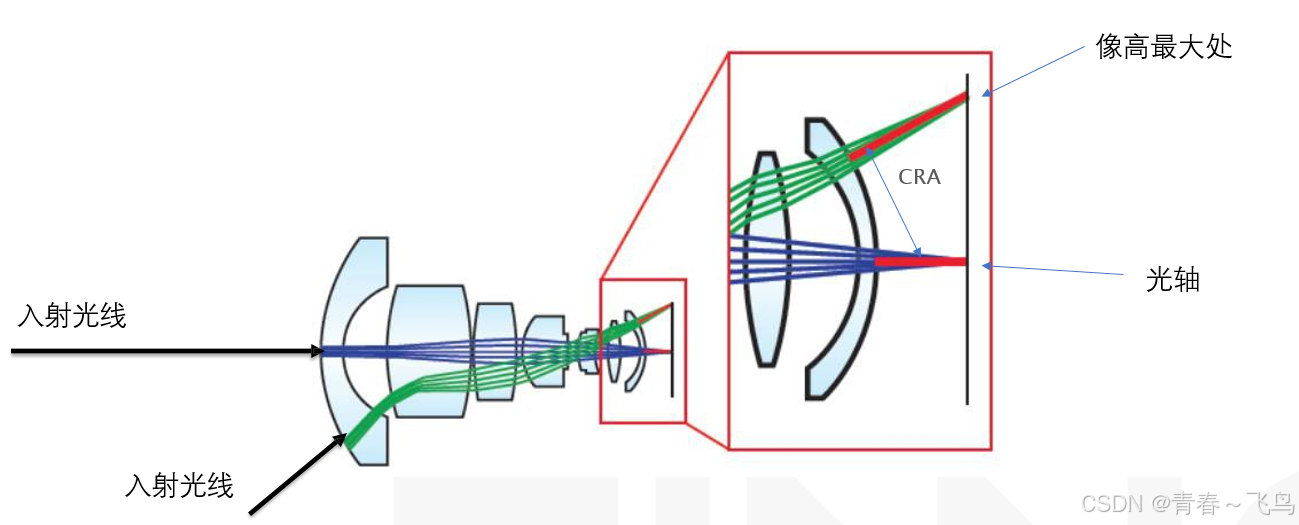
3.Lens CRA(Chief ray angle)
CRA的定义:像高最大处的入射光线与光轴的夹角
原则上Lens CRA和Sensor CRA 要匹配
Lens CRA !> Sensor CRA,否则会有很强的shading
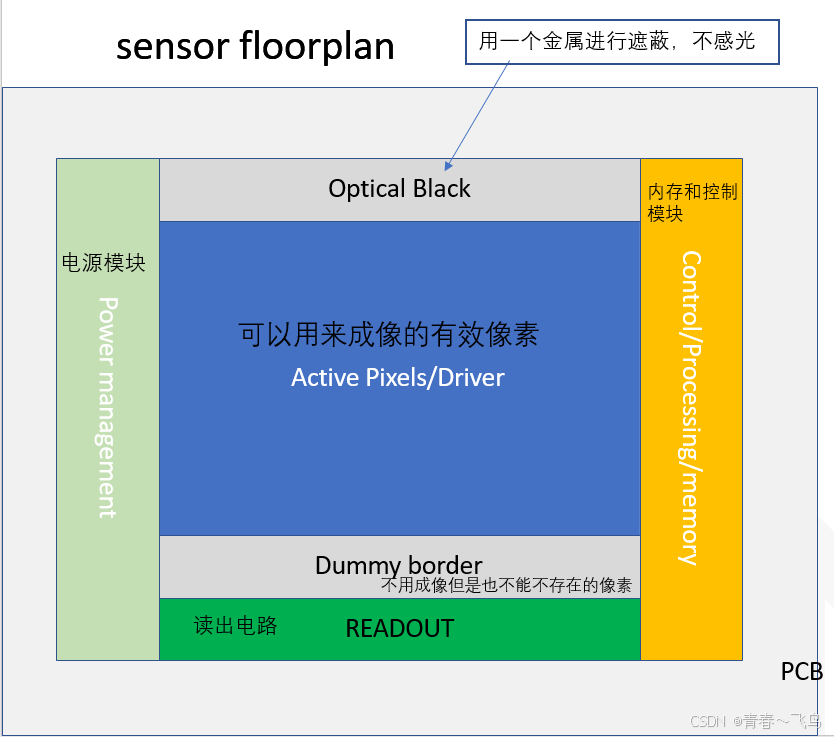
4.sensor floorplan
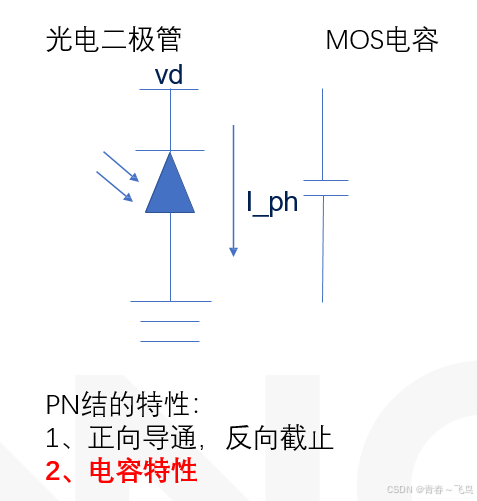
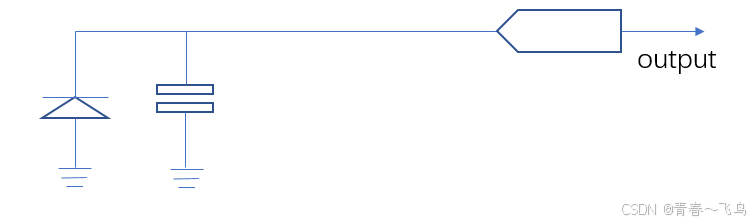
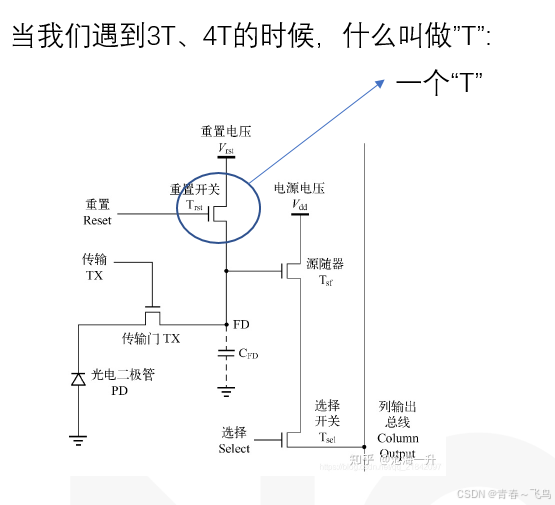
5.像素的设计:光电二极管+MOS电容
目前对于piexl的两种设计:
- passive pixel sensor(PPS)
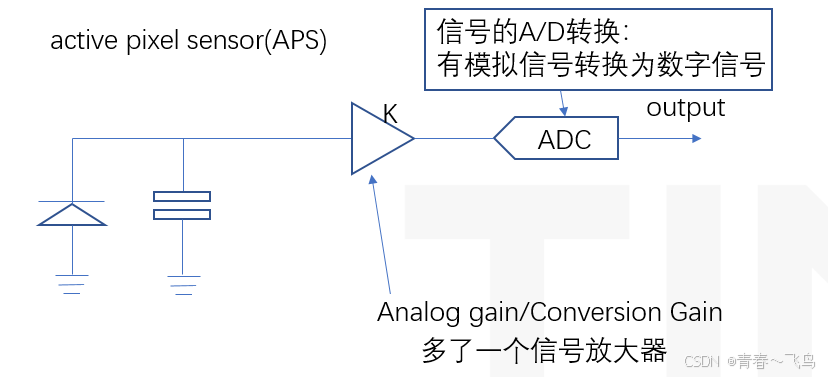
- active pixel sensor(APS)
4T的设计比3T的设计可以通过CDS降低更多的reset noise
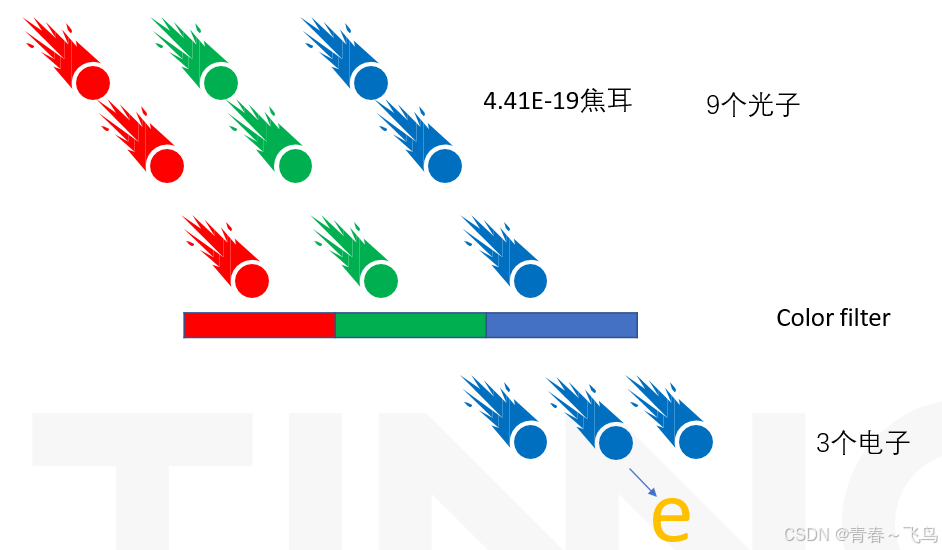
6.光子(Photon)与量子效率quantum efficiency
- QE是衡量某个颜色通道某个频率/波长的光子转换成电子的效率
上图中:
根据公式:E=hc/ λ
Total_Power = sum_of (all photons)
所以QE = 1/3
6.1.与量子效率QE有关的几个重要概念
- IR(近红外) cutter----cut near IR
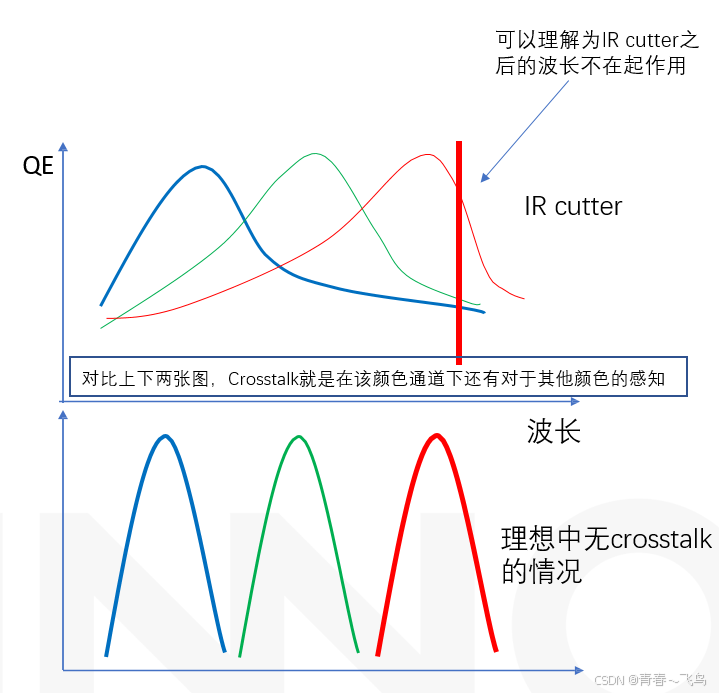
- Crosstalk(串扰):在下图中,坐标横轴是波长,纵轴是QE,所以右上图表示的Sensor三个通道上对于不同波长的光(颜色)的QE曲线。我们拿蓝色通道举例,我们可以看到蓝色的通道对很长的波长范围的光都是有QE的,意思就是这些波长的光都可以转换为电子,但是这些波长的光并不是都蓝色,这就是串扰。
- Sensitivity 感光度=QE X Pixel_Size
7.Crosstalk 对noise的影响
一般,我们对于Crosstalk的解决方法就是ISP中的CCM模块,本质就是把对于另外两个通道的感知的电子减掉。所以在数学上我们可以采用矩阵的形式进行计算。具体细节见后面的CCM模块的讲解。
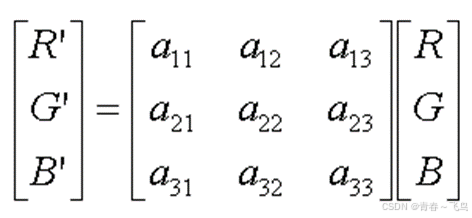
一般来说CCM使用的是如左图所示的3x3的矩阵,也有使用是3*3的矩阵在加上偏置项的3x4矩阵的算法(fuhan) ,但是不推荐,原因是在ISP后面的模块中处理颜色的时候会有问题,不管使用哪一种算法,每一行的和都要==1,不然灰色就会偏掉。
同时,对于信噪比来说,以R通道举例:
信号R‘ =a11×R + a12 x G+a13 x B(其中R’是真正的红,不带‘的是Sensor感光得到的,需要从我们统计得到的值中减去不属于该通道的信号,所以一般来说a12和a13是负值)
噪声N‘ =(a11×R)2 + (a12xG)2+(a13xB)2 (加性模型的噪声计算公式:(N1,N2) =(N12+N22) 0.5)
所以负的系数越大SNR(信噪比:信号/噪声)越低,所以Crosstalk越强,Sensor的噪声表现越差
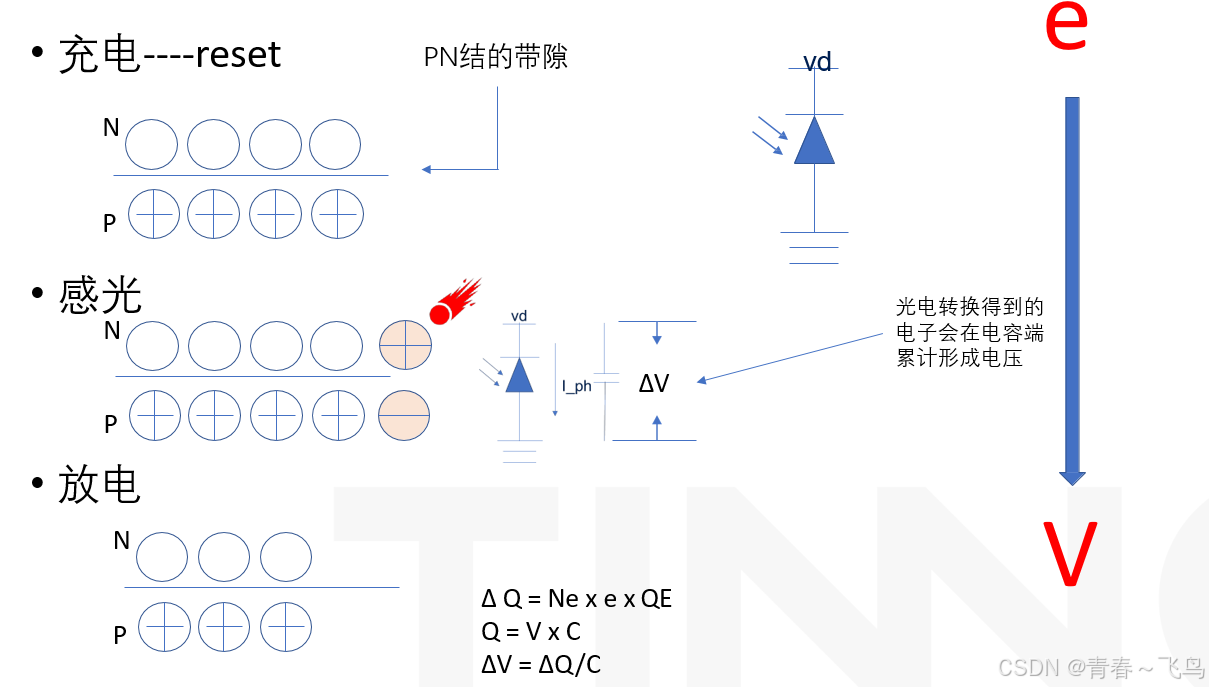
8.Pixel的感光过程
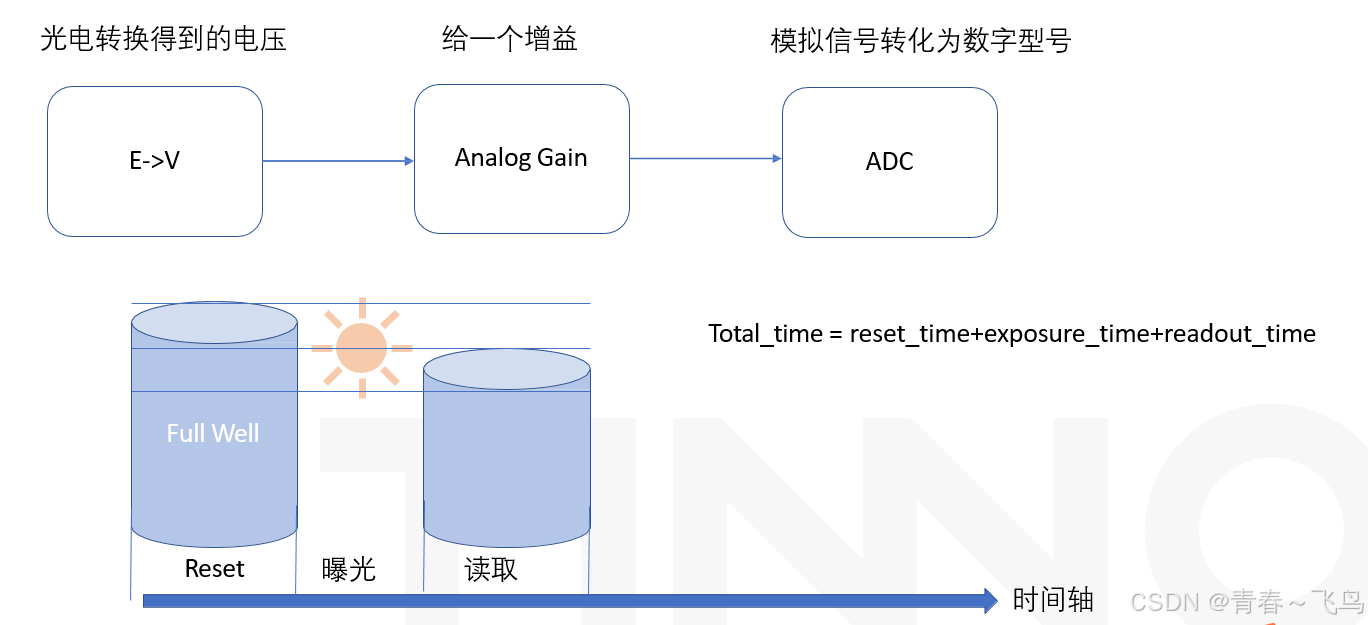
9.读取过程
10.Sensor动态范围
- Full well Capacity(能容纳多少电子)
- Dark Current (不感光的时候有多少电子)
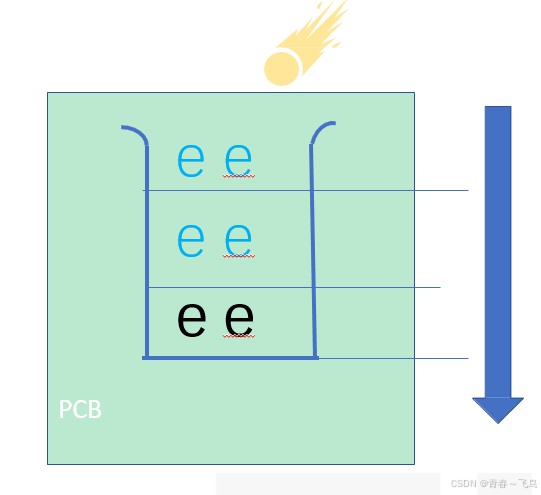
- Fill Factor(PCB板上空间使用效率)
Dynamic Range = Saturation / Noise floor 可以简化为 =》 Dynamic Range = Saturation/ black level
11.Sensor 时序
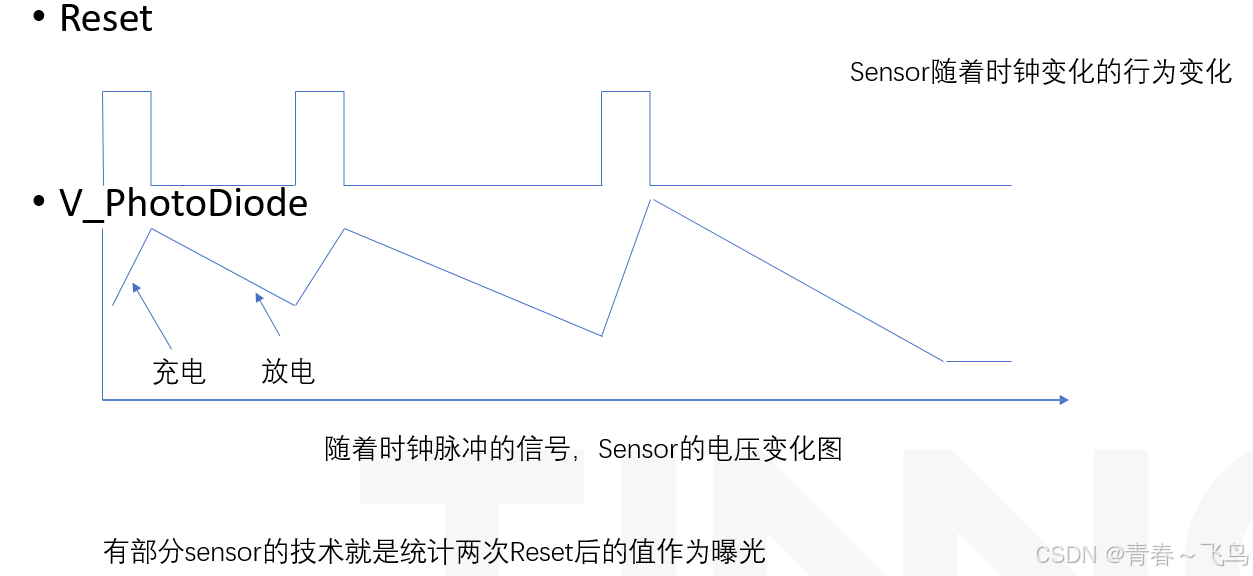
12.Noise in sensor
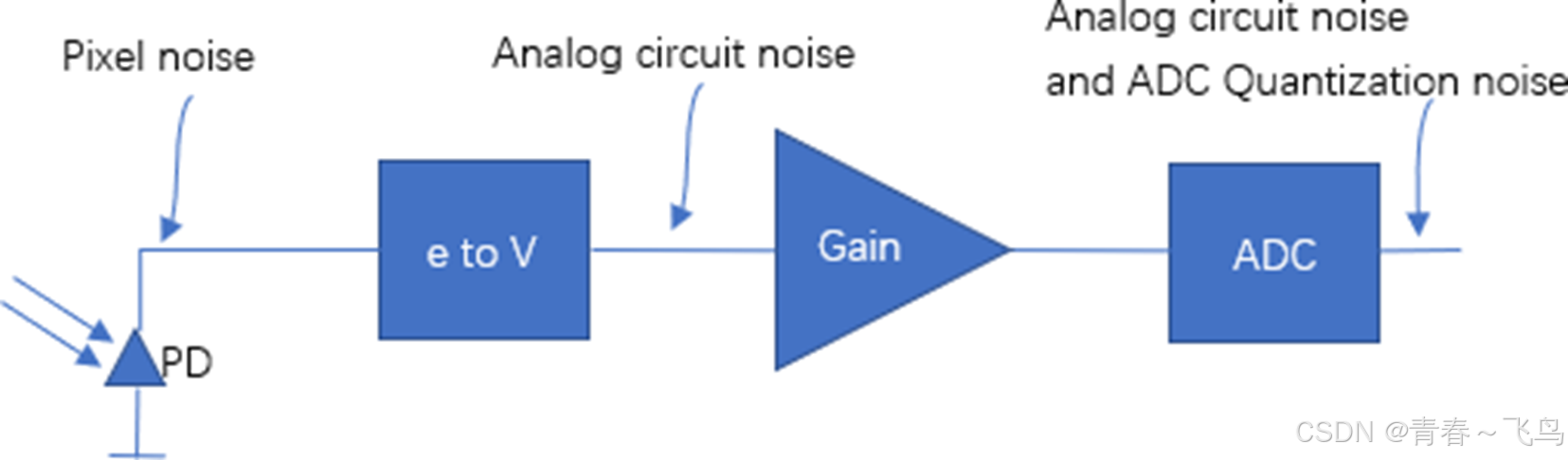
成像过程中的每一步都会引入噪声,Sensor也不例外,在上图中的每一个过程都会引入噪声,最主要的是shot noise和热噪声,他们都是现阶段无法被避免但是可以进行优化的噪声,sony的sensor之所以好就是因为在sensor的每个部分都做到了细致的处理,这样出来的信号才有更好的噪声表现。
时域噪声与空域噪声:
- 时域噪声
KTC Noise(复位噪声,readout电路中经常看到,主要和温度T和电容C相关),PhotonShotNoise(光子的散粒噪声),DarkCurrentNoise(工艺引入的即时不感光也有电子在),PowerNoise(电源噪声)
- 空域噪声
DefectPixel(坏点),Row/ColumnNoise(横竖条纹状的噪声),PRNU,DSNU
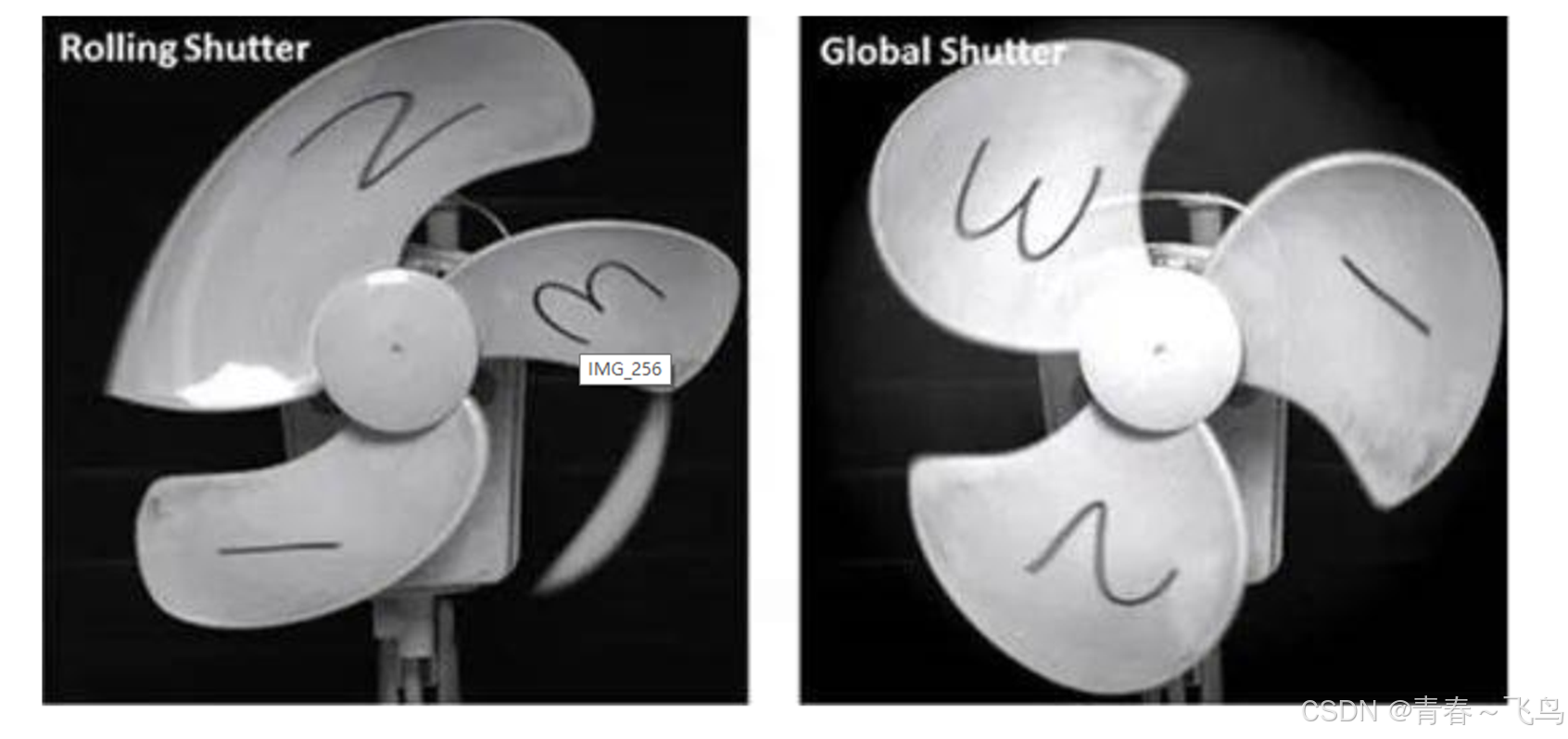
13.Electronic shutter: rolling shutter VS global shutter
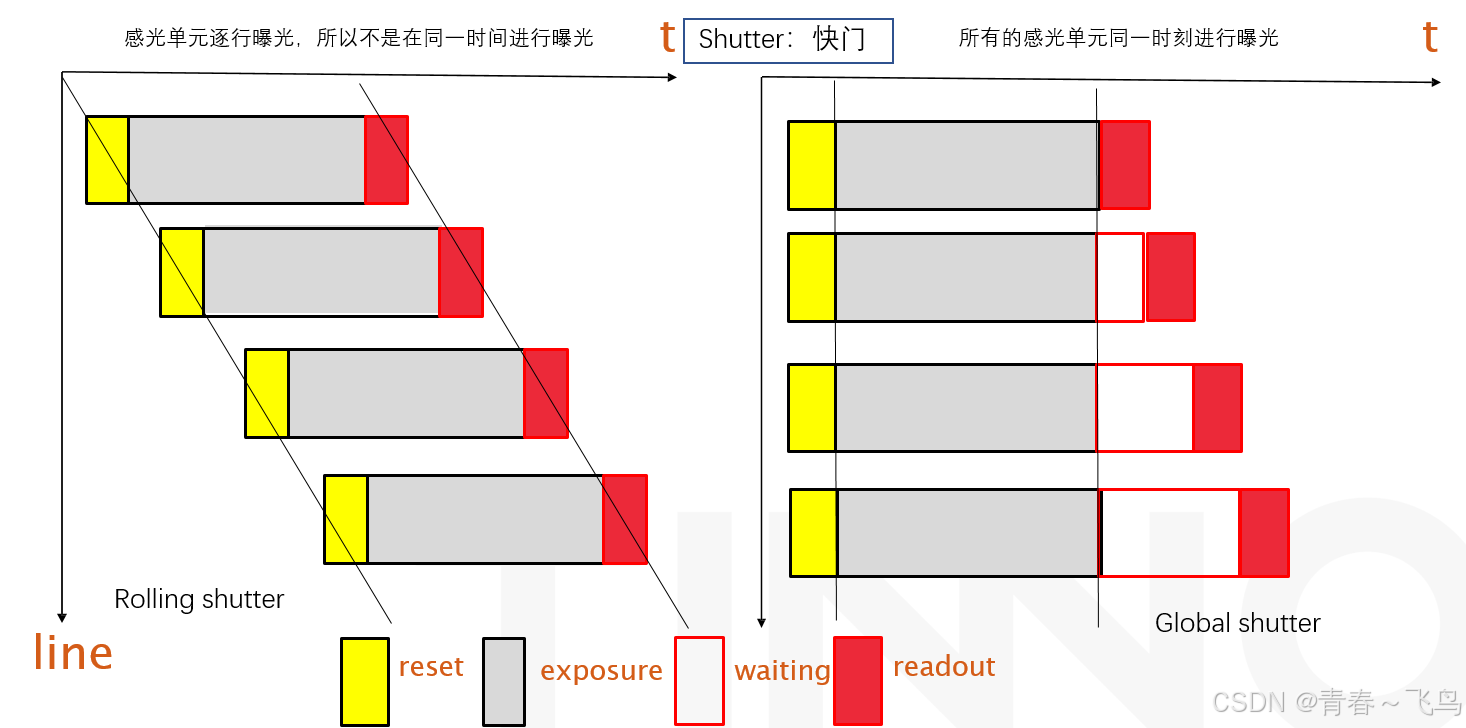
Rolling shutter的果冻效应:


















 3239
3239

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











