







 该博客围绕三维图形变换实验展开,目的是掌握4*4矩阵乘法、基本三维几何变换矩阵生成及正交投影图绘制方法。实验要求设计三维图形变换类,用直线类绘制正四面体三维线框模型并投影到X0Y平面。详细介绍了项目创建、文件建立、类设计等步骤。
该博客围绕三维图形变换实验展开,目的是掌握4*4矩阵乘法、基本三维几何变换矩阵生成及正交投影图绘制方法。实验要求设计三维图形变换类,用直线类绘制正四面体三维线框模型并投影到X0Y平面。详细介绍了项目创建、文件建立、类设计等步骤。
一.实验目的
1)掌握4*4矩阵乘法运算的编程实现
2)掌握平移,比例,旋转三种基本三维几何变换矩阵生成
3)掌握正交投影图的生成和绘制方法
二.实验要求
1)三维坐标系的原点位于屏幕中心,X轴水平向右,X轴垂直向上,Z轴垂直
于坐标屏幕,指向屏幕外。
2)设计实现三维图形变换类,具有平移、比例、旋转三维几何变换功能,以
及正交投影变换功能.
3)使用第二章的直线类绘制正四面体的是三维线框模型,要求体心位于坐标原点,使正四面体同时绕Y轴匀速旋转,并相对于体心点来回缩放。
4)使用双缓冲机制,绘制正四面体三维线框模型的二维正交投影图,要求投
影到X0Y平面。
三.详细设计
注意:建议创建项目名为TTest.sln,这样可以直接使用本代码
1.本次实验使用直线扫描转换——中点Bresenham扫描换算法的MFC项目工程,可以参考文章:直线扫描转换——中点Bresenham扫描换算法(VS2022)_BaoTuxxl的博客-优快云博客_bresenham直线扫描转换算法
2.首先创建CP3Edge.h和CP3Edge.cpp文件,建立三维齐次坐标顶点类和边表类:
CP3Edge.h:
#pragma once
class CP3
{
public :
CP3();
virtual ~CP3();
CP3(double,double,double);
public:
double x;
double y;
double z;
double w;
};
//边表类
class CEdge
{
public:
CEdge();
virtual ~CEdge();
void SetPointsIndex(int, int);
public:
int Start;
int End;
};CP3Edge.cpp:
#include"pch.h"
#include"CP3Edge.h"
CP3::CP3()
{
x = 0.0;
y = 0.0;
z = 0.0;
w = 1.0;
}
CP3::~CP3()
{}
CP3::CP3(double x, double y, double z) {
this->x = x;
this->y = y;
this->z = z;
this->w = 1.0;
}
//边表类
CEdge::CEdge() {
Start = 0;
End = 0;
}
CEdge::~CEdge()
{}
void CEdge::SetPointsIndex(int start, int end) {
Start = start;
End = end;
}3.设计实现三维图形几何变换类
新建CTrans3D.h和CTrans3D.cpp
CTrans3D.h:
#pragma once
#include"Line.h"
#include"CP3Edge.h"
class CTrans3D//三维几何变换
{
public :
CTrans3D();
virtual~CTrans3D();
void SetPoints(CP3*, int);
void Identity();
void Translate(double, double, double);
void RotateX(double);
void RotateY(double);
void RotateZ(double);
void Scale(double, double, double);
void ProjXOY();
protected:
void MultiMatrix();
public:
double m_aT[4][4];
CP3* m_p3Points;
CP2* m_p2Screen;
int m_iNum;
};CTrans3D.cpp:
#include "pch.h"
#include"CTrans3D.h"
#include"math.h"
#define PI 3.14159
CTrans3D::CTrans3D()
{}
CTrans3D::~CTrans3D()
{
if (m_p2Screen)
{
delete []m_p2Screen;
m_p2Screen = NULL;
}
if (m_p3Points)
{
delete []m_p3Points;
m_p3Points = NULL;
}
}
void CTrans3D::SetPoints(CP3* p, int n)
{
m_p3Points = new CP3[n];
for (int i = 0; i < n; i++)
m_p3Points[i] = p[i];
m_iNum = n;
}
void CTrans3D::Identity() {
m_aT[0][0] = 1.0; m_aT[0][1] = 0.0; m_aT[0][2] = 0.0; m_aT[0][3] = 0.0;
m_aT[1][0] = 0.0; m_aT[1][1] = 1.0; m_aT[1][2] = 0.0; m_aT[1][3] = 0.0;
m_aT[2][0] = 0.0; m_aT[2][1] = 0.0; m_aT[2][2] = 1.0; m_aT[2][3] = 0.0;
m_aT[3][0] = 0.0; m_aT[3][1] = 0.0; m_aT[3][2] = 0.0; m_aT[3][3] = 1.0;
}
void CTrans3D::Translate(double tx, double ty, double tz)
{
Identity();
m_aT[3][0] = tx;
m_aT[3][1] = ty;
m_aT[3][2] = tz;
MultiMatrix();
}
void CTrans3D::Scale(double sx, double sy, double sz) {
Identity();
m_aT[0][0] = sx;
m_aT[1][1] = sy;
m_aT[2][2] = sz;
MultiMatrix();
}
void CTrans3D::RotateX(double beta) {
Identity();
double rad = beta * PI / 180;
m_aT[1][1] = cos(rad);
m_aT[1][2] = sin(rad);
m_aT[2][1] = -sin(rad);
m_aT[2][2] = cos(rad);
MultiMatrix();
}
void CTrans3D::RotateY(double beta) {
Identity();
double rad = beta * PI / 180;
m_aT[0][0] = cos(rad);
m_aT[0][2] = -sin(rad);
m_aT[2][0] = sin(rad);
m_aT[2][2] = cos(rad);
MultiMatrix();
}
void CTrans3D::RotateZ(double beta) {
Identity();
double rad = beta * PI / 180;
m_aT[0][0] = cos(rad);
m_aT[0][1] = sin(rad);
m_aT[1][0] = -sin(rad);
m_aT[1][1] = cos(rad);
MultiMatrix();
}
void CTrans3D::ProjXOY() {
m_p2Screen = new CP2[m_iNum];
for (int i = 0; i < m_iNum; i++) {
m_p2Screen[i].x = m_p3Points[i].x;
m_p2Screen[i].y = m_p3Points[i].y;
}
}
void CTrans3D::MultiMatrix() {
CP3* PNew = new CP3[m_iNum];
for (int i = 0; i < m_iNum; i++) {
PNew[i] = m_p3Points[i];
}
for (int j = 0; j < m_iNum; j++) {
m_p3Points[j].x = PNew[j].x * m_aT[0][0] + PNew[j].y * m_aT[1][0] + PNew[j].z * m_aT[2][0] + PNew[j].w * m_aT[3][0];
m_p3Points[j].y = PNew[j].x * m_aT[0][1] + PNew[j].y * m_aT[1][1] + PNew[j].z * m_aT[2][1] + PNew[j].w * m_aT[3][1];
m_p3Points[j].z = PNew[j].x * m_aT[0][2] + PNew[j].y * m_aT[1][2] + PNew[j].z * m_aT[2][2] + PNew[j].w * m_aT[3][2];
m_p3Points[j].w = PNew[j].x * m_aT[0][3] + PNew[j].y * m_aT[1][3] + PNew[j].z * m_aT[2][3] + PNew[j].w * m_aT[3][3];
}
delete[]PNew;
}
4.建立正四面体的点表和边表
将TTestView.h更新为:
// TTestView.h: CTTestView 类的接口
//
#pragma once
#include "CP3Edge.h"
class CTTestView : public CView
{
protected: // 仅从序列化创建
CTTestView() noexcept;
DECLARE_DYNCREATE(CTTestView)
// 特性
public:
CTTestDoc* GetDocument() const;
// 操作
public:
void BuildPointEdge();
// 重写
public:
virtual void OnDraw(CDC* pDC); // 重写以绘制该视图
virtual BOOL PreCreateWindow(CREATESTRUCT& cs);
protected:
virtual BOOL OnPreparePrinting(CPrintInfo* pInfo);
virtual void OnBeginPrinting(CDC* pDC, CPrintInfo* pInfo);
virtual void OnEndPrinting(CDC* pDC, CPrintInfo* pInfo);
// 实现
public:
virtual ~CTTestView();
#ifdef _DEBUG
virtual void AssertValid() const;
virtual void Dump(CDumpContext& dc) const;
#endif
protected:
CP3 P[4];
CEdge E[6];
// 生成的消息映射函数
protected:
afx_msg void OnFilePrintPreview();
afx_msg void OnRButtonUp(UINT nFlags, CPoint point);
afx_msg void OnContextMenu(CWnd* pWnd, CPoint point);
DECLARE_MESSAGE_MAP()
};
#ifndef _DEBUG // TTestView.cpp 中的调试版本
inline CTTestDoc* CTTestView::GetDocument() const
{ return reinterpret_cast<CTTestDoc*>(m_pDocument); }
#endif
将TTestView.cpp更新为:
// TTestView.cpp: CTTestView 类的实现
//
#include "pch.h"
#include "framework.h"
// SHARED_HANDLERS 可以在实现预览、缩略图和搜索筛选器句柄的
// ATL 项目中进行定义,并允许与该项目共享文档代码。
#ifndef SHARED_HANDLERS
#include "TTest.h"
#endif
#include "CTrans3D.h"
#include "Line.h"
#include "TTestDoc.h"
#include "TTestView.h"
#ifdef _DEBUG
#define new DEBUG_NEW
#endif
// CTTestView
IMPLEMENT_DYNCREATE(CTTestView, CView)
BEGIN_MESSAGE_MAP(CTTestView, CView)
// 标准打印命令
ON_COMMAND(ID_FILE_PRINT, &CView::OnFilePrint)
ON_COMMAND(ID_FILE_PRINT_DIRECT, &CView::OnFilePrint)
ON_COMMAND(ID_FILE_PRINT_PREVIEW, &CTTestView::OnFilePrintPreview)
ON_WM_CONTEXTMENU()
ON_WM_RBUTTONUP()
END_MESSAGE_MAP()
// CTTestView 构造/析构
CTTestView::CTTestView() noexcept
{
// TODO: 在此处添加构造代码
BuildPointEdge();
}
void CTTestView::BuildPointEdge()
{
double d = 400;
P[0].x = d / 2; P[0].y = d / 2; P[0].z = d / 2;
P[1].x = d / 2; P[1].y = -d / 2; P[1].z = -d / 2;
P[2].x = -d / 2; P[2].y = -d / 2; P[2].z = d / 2;
P[3].x = -d / 2; P[3].y = d / 2; P[3].z = -d / 2;
E[0].SetPointsIndex(0, 1);
E[1].SetPointsIndex(0, 2);
E[2].SetPointsIndex(0, 3);
E[3].SetPointsIndex(1, 2);
E[4].SetPointsIndex(1, 3);
E[5].SetPointsIndex(2, 3);
}
CTTestView::~CTTestView()
{
}
BOOL CTTestView::PreCreateWindow(CREATESTRUCT& cs)
{
// TODO: 在此处通过修改
// CREATESTRUCT cs 来修改窗口类或样式
return CView::PreCreateWindow(cs);
}
// CTTestView 绘图
void CTTestView::OnDraw(CDC* pDC)
{
CTTestDoc* pDoc = GetDocument();
ASSERT_VALID(pDoc);
if (!pDoc)
return;
// TODO: 在此处为本机数据添加绘制代码
CRect rect;
GetClientRect(&rect);
pDC->SetMapMode(MM_ANISOTROPIC);
pDC->SetWindowExt(rect.Width(), rect.Height());
pDC->SetViewportExt(rect.Width(), -rect.Height());
pDC->SetViewportOrg(rect.Width() / 2, rect.Height() / 2);
// rect.OffsetRect(-rect.Width() / 2, -rect.Height() / 2);
CDC MemDC;
CBitmap NewBitmap, * pOldBitmap;
MemDC.CreateCompatibleDC(pDC);
NewBitmap.CreateCompatibleBitmap(pDC, rect.Width(), rect.Height());
pOldBitmap = MemDC.SelectObject(&NewBitmap);
MemDC.FillSolidRect(rect, pDC->GetBkColor());
MemDC.SetMapMode(MM_ANISOTROPIC);
MemDC.SetWindowExt(rect.Width(), rect.Height());
MemDC.SetViewportExt(rect.Width(), -rect.Height());
MemDC.SetViewportOrg(rect.Width() / 2, rect.Height() / 2);
CLine* line = new CLine;
line->SetLineColor(RGB(0, 0, 0));
line->MoveTo(CP2(-rect.Width() / 2, 0));
line->LineTo(CP2(rect.Width() / 2, 0), &MemDC);
line->MoveTo(CP2(0, -rect.Height() / 2));
line->LineTo(CP2(0, rect.Height() / 2), &MemDC);
CTrans3D tans;
tans.SetPoints(P, 4);
static float s = 1.0;
static float step = 0.01f;
if (s >= 2.0 || s <= 0.5)
step = -step;
s += step;
tans.Scale(s, s, s);
static float theta = 0.0;
theta += 1.0;
if (theta >= 360.0)
theta = 0.0;
tans.RotateY(theta);
tans.ProjXOY();
for (int i = 0; i < 6; i++)
{
line->SetLineColor(RGB(0, 255, 0));
line->MoveTo(tans.m_p2Screen[E[i].Start]);
line->LineTo(tans.m_p2Screen[E[i].End], &MemDC);
}
delete line;
pDC->BitBlt(-rect.Width() / 2, -rect.Height() / 2, rect.Width(), rect.Height(), &MemDC, -rect.Width() / 2, -rect.Height() / 2, SRCCOPY);
MemDC.SelectObject(pOldBitmap);
NewBitmap.DeleteObject();
Invalidate(FALSE);
}
// CTTestView 打印
void CTTestView::OnFilePrintPreview()
{
#ifndef SHARED_HANDLERS
AFXPrintPreview(this);
#endif
}
BOOL CTTestView::OnPreparePrinting(CPrintInfo* pInfo)
{
// 默认准备
return DoPreparePrinting(pInfo);
}
void CTTestView::OnBeginPrinting(CDC* /*pDC*/, CPrintInfo* /*pInfo*/)
{
// TODO: 添加额外的打印前进行的初始化过程
}
void CTTestView::OnEndPrinting(CDC* /*pDC*/, CPrintInfo* /*pInfo*/)
{
// TODO: 添加打印后进行的清理过程
}
void CTTestView::OnRButtonUp(UINT /* nFlags */, CPoint point)
{
ClientToScreen(&point);
OnContextMenu(this, point);
}
void CTTestView::OnContextMenu(CWnd* /* pWnd */, CPoint point)
{
#ifndef SHARED_HANDLERS
theApp.GetContextMenuManager()->ShowPopupMenu(IDR_POPUP_EDIT, point.x, point.y, this, TRUE);
#endif
}
// CTTestView 诊断
#ifdef _DEBUG
void CTTestView::AssertValid() const
{
CView::AssertValid();
}
void CTTestView::Dump(CDumpContext& dc) const
{
CView::Dump(dc);
}
CTTestDoc* CTTestView::GetDocument() const // 非调试版本是内联的
{
ASSERT(m_pDocument->IsKindOf(RUNTIME_CLASS(CTTestDoc)));
return (CTTestDoc*)m_pDocument;
}
#endif //_DEBUG
// CTTestView 消息处理程序
5.最后需要修改Line.h和Line.cpp的内容,将二维改成三维
Line.h:
#pragma once
class CP2
{
public:
CP2();
virtual~CP2();
CP2(double, double);
public:
double x;
double y;
double w;
};
class CLine
{
public:
CLine();
virtual~CLine();
void SetLineColor(COLORREF);
void MoveTo(CP2);
void MoveTo(double, double);
void LineTo(CP2, CDC*);
void LineTo(double, double, CDC*);
public:
CP2 P0;
CP2 P1;
COLORREF clr;
};
Line.cpp:
#include "pch.h"
#include "Line.h"
#include "math.h"
#define Round(d) int (floor(d+0.5))
CP2::CP2()
{
x = 0.0;
y = 0.0;
w = 1.0;
}
CP2::~CP2()
{}
CP2::CP2(double x, double y)
{ /*齐次坐标*/
this->x = x;
this->y = y;
this->w = 1;
}
CLine::CLine()
{}
CLine::~CLine()
{}
void CLine::SetLineColor(COLORREF color)
{
clr = color;
}
void CLine::MoveTo(CP2 p0)
{
P0 = p0;
}
void CLine::MoveTo(double x, double y)
{
P0.x = x;
P0.y = y;
}
void CLine::LineTo(double x, double y, CDC* pDC)
{
CP2 p;
p.x = x;
p.y = y;
LineTo(p, pDC);
}
void CLine::LineTo(CP2 p1, CDC* pDC)
{
P1 = p1;
CP2 p, t;
if (fabs(P0.x - P1.x) < 1e-6)
{
if (P0.y > P1.y)
{
t = P0; P0 = P1; P1 = t;
}
for (p = P0; p.y < P1.y; p.y++)
{
pDC->SetPixelV(Round(p.x), Round(p.y), clr);
}
}
else
{
double k, d;
k = (P1.y - P0.y) / (P1.x - P0.x);
if (k > 1.0)
{
if (P0.y > P1.y)
{
t = P0; P0 = P1; P1 = t;
}
d = 1 - 0.5 * k;
for (p = P0; p.y < P1.y; p.y++)
{
pDC->SetPixelV(Round(p.x), Round(p.y), clr);
if (d >= 0)
{
p.x++;
d += 1 - k;
}
else
d += 1;
}
}
if (0.0 <= k && k <= 1.0)
{
if (P0.x > P1.x)
{
t = P0; P0 = P1; P1 = t;
}
d = 0.5 - k;
for (p = P0; p.x < P1.x; p.x++)
{
pDC->SetPixelV(Round(p.x), Round(p.y), clr);
if (d < 0)
{
p.y++;
d += 1 - k;
}
else
d -= k;
}
}
if (k >= -1.0 && k < 0.0)
{
if (P0.x > P1.x)
{
t = P0; P0 = P1; P1 = t;
}
d = -0.5 - k;
for (p = P0; p.x < P1.x; p.x++)
{
pDC->SetPixelV(Round(p.x), Round(p.y), clr);
if (d > 0)
{
p.y--;
d -= 1 + k;
}
else
d -= k;
}
}
if (k < -1.0)
{
if (P0.y < P1.y)
{
t = P0; P0 = P1; P1 = t;
}
d = -1 - 0.5 * k;
for (p = P0; p.y > P1.y; p.y--)
{
pDC->SetPixelV(Round(p.x), Round(p.y), clr);
if (d < 0)
{
p.x++;
d -= 1 + k;
}
else
d -= 1;
}
}
}
P0 = p1;
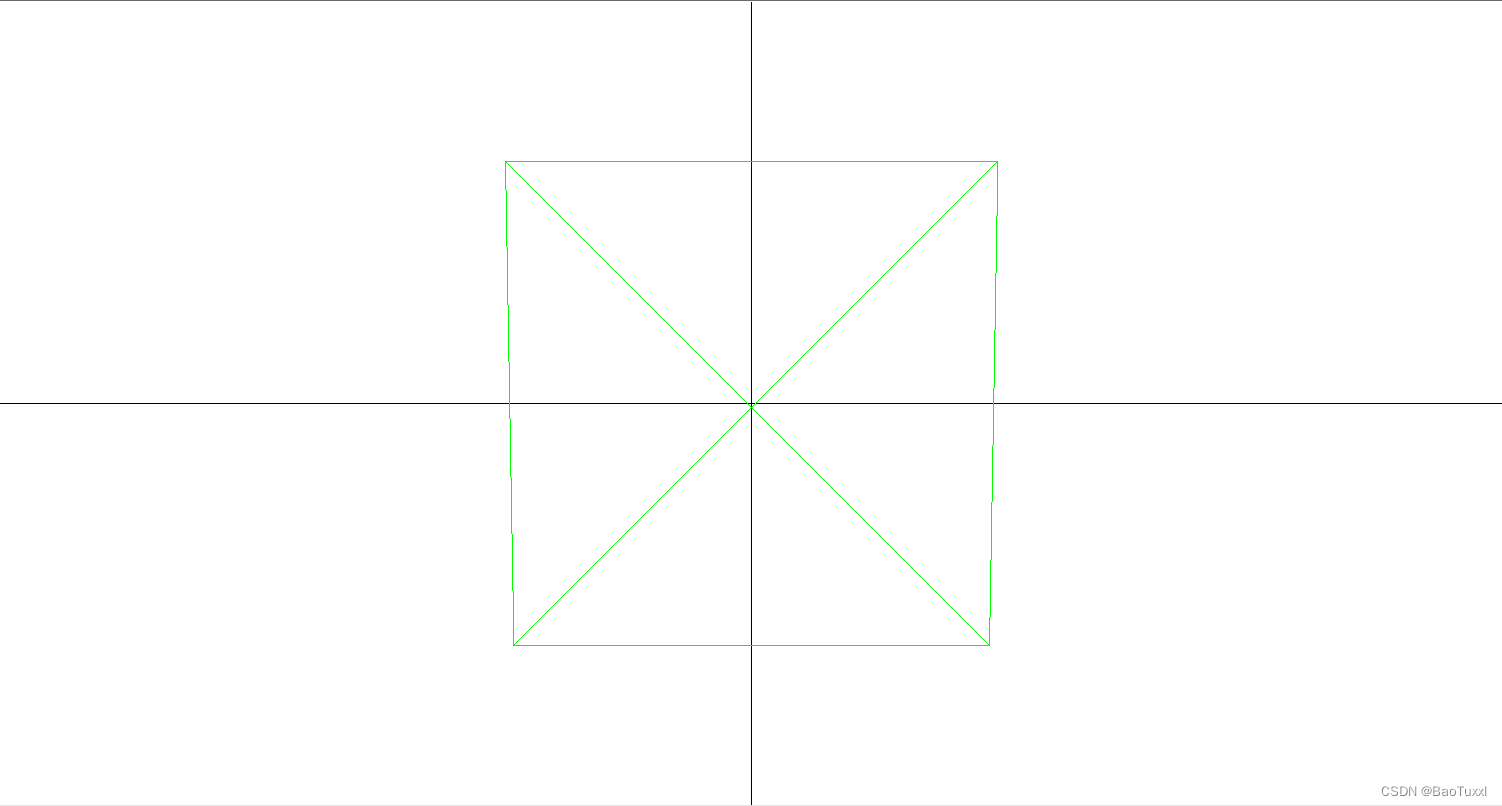
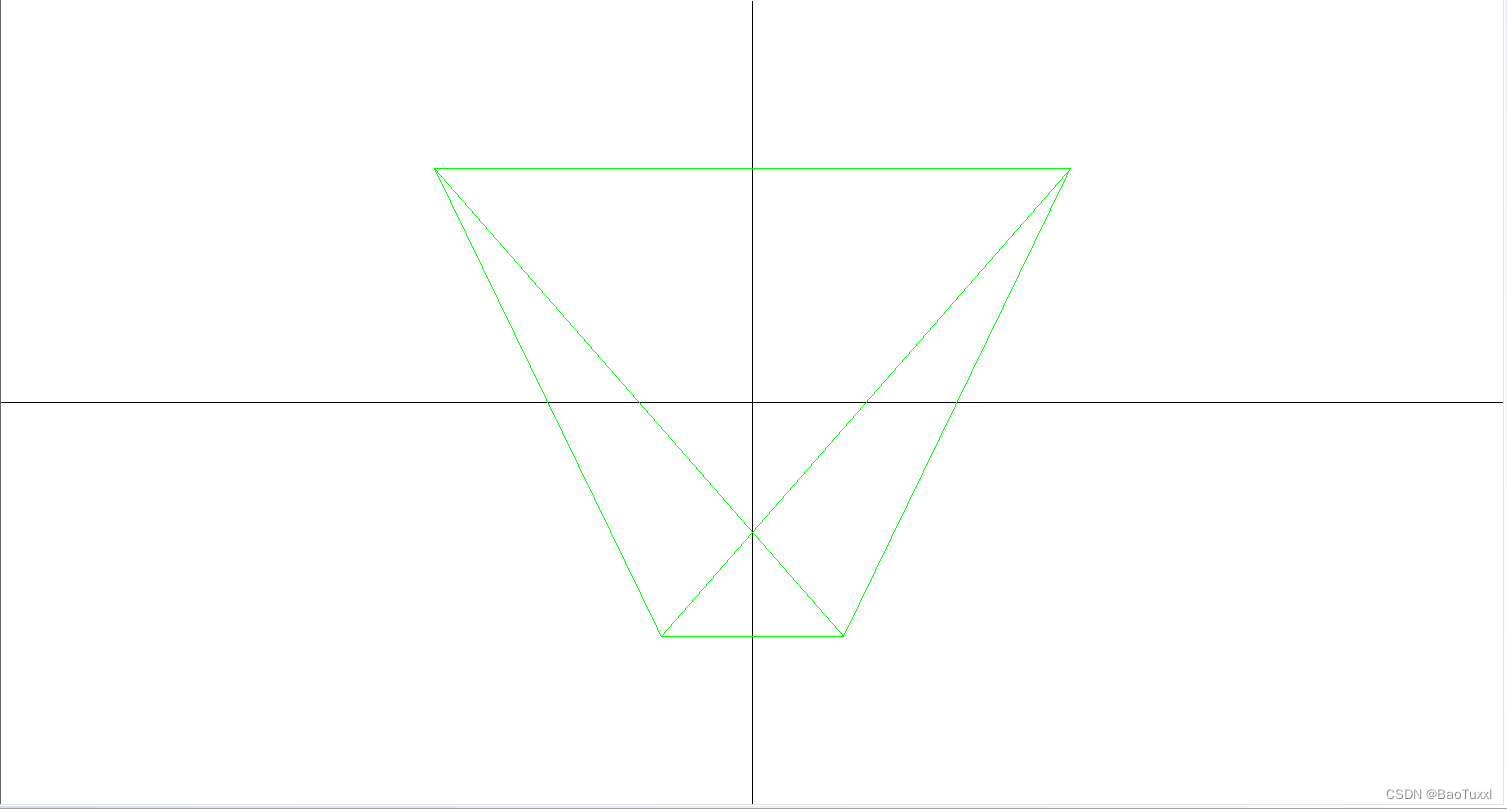
}四.典型测试结果


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









