







我的新分工是负责上位机的配置和其他一系列操作。
简单来说:本次智能车是由上位机和下位机构成的,下位机控制电机、舵机、传入各类传感器参数值。上位机控制摄像头处理图像、传递给下位机数据来运行。
我负责的就是上位机的操控部分。
首先需要配置基础环境,上位机内部自带linux系统:是一个板卡。需要在其中进行程序的编译运行等操作。

yahboom搭载的系统是基于ubuntu20.04的jetson 官方系统所搭建出的yahbooom版本的系统。系统的配置如下图所示:
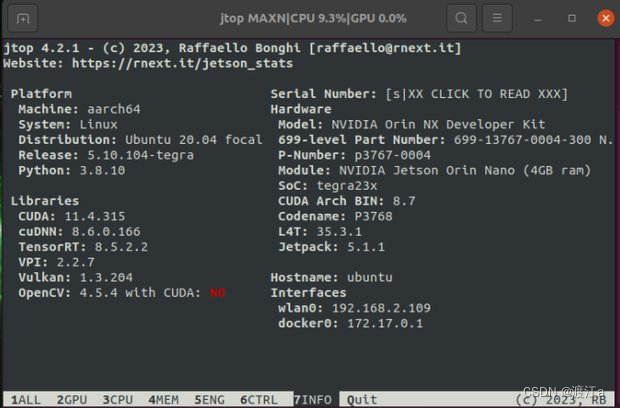
可得到:
- linux 64位系统
- ubtntu 20.04
- python 3.8
- CUDA 11.4
- cuDNN 8.6
- TensorRT 8.5
- opencv 4.5.4
- jetpack 5.1.1
- jetson Orin Nano 密码:yahboom(此处密码已经修改为jetson)
Linux的桌面就很简单易懂了,只要正常开机,就能直接进入了桌面,通过连接鼠标、键盘、显示器,就能像操控电脑一样操作jetson orin nano了。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









