







 本文介绍了大象机器人mechArm Pi 270的关节控制,包括单关节和多关节控制的详细操作,如指定角度、电位值的控制,并提供了相关案例。
本文介绍了大象机器人mechArm Pi 270的关节控制,包括单关节和多关节控制的详细操作,如指定角度、电位值的控制,并提供了相关案例。
以大象机器人mechArm pi 270为例。

1 产品简介
mechArm Pi 270隶属于大象机器人"mechArm"系列小六轴机械臂,采用树莓派微处理器,支持ROS仿真模拟软件,是大象机器人面向创客创新和机器人产学研服务推出的仿工业构型小六轴机械臂
mechArmPi270本体重量1kg, 负载250g,工作半径270mm,设计紧凑便携,小巧但功能强大,操作简单,能与人协同、安全工作。作为大象机器人首款小六轴机械臂,具有易用性、安全性和经济性三大优势,是高性价比之选。
2、关节控制
对于串联式多关节机器人,关节空间的控制是针对机器人各个关节的变量进行的控制,目标是让机器人各个关节按照一定速度达到目标位置。
2.1单关节控制
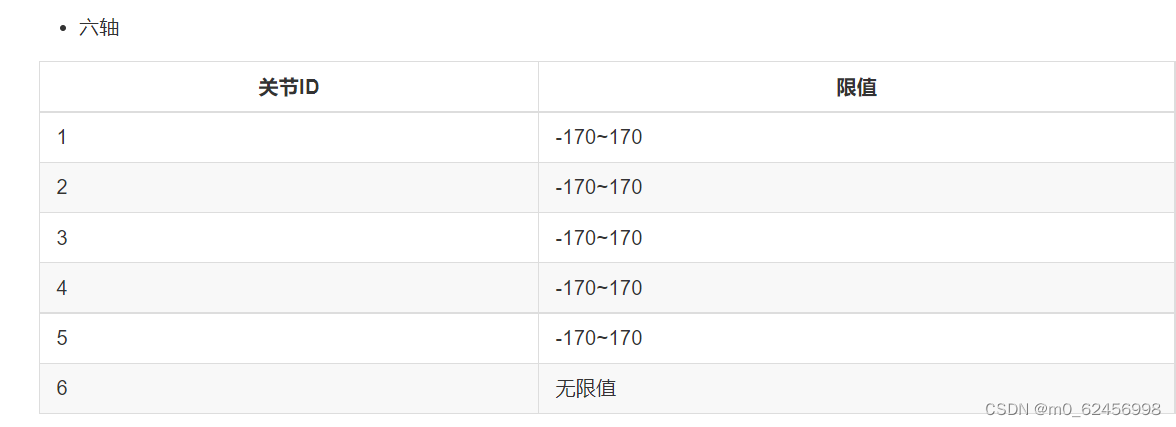
对于关节角度的取值范围:六轴机器人约-170 ~ 170,四轴机器人每个关节限值各不相同,详见上方表格图
1、send_angle(id, degree, speed)
- 功能
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









