







 本文介绍了基于SolidWorks建模和Python验证的双目立体视觉坐标测量仿真,详细阐述了相机参数、像素坐标和三维坐标计算。使用巴斯勒工业相机进行双目实时测量,依赖于pypylon库。误差分析探讨了内参、外参和质心坐标误差对结果的影响。
本文介绍了基于SolidWorks建模和Python验证的双目立体视觉坐标测量仿真,详细阐述了相机参数、像素坐标和三维坐标计算。使用巴斯勒工业相机进行双目实时测量,依赖于pypylon库。误差分析探讨了内参、外参和质心坐标误差对结果的影响。
双目立体视觉
坐标测量仿真
本双目坐标测量仿真基于SoildWorks进行模型绘制,基于Python语言验证仿真模型结果。
在仿真模型中,双目相机之间的基距设为800mm,每个相机的镜头焦距设置为100mm,待测点距离在20m左右。

图1:双目仿真模型局部图
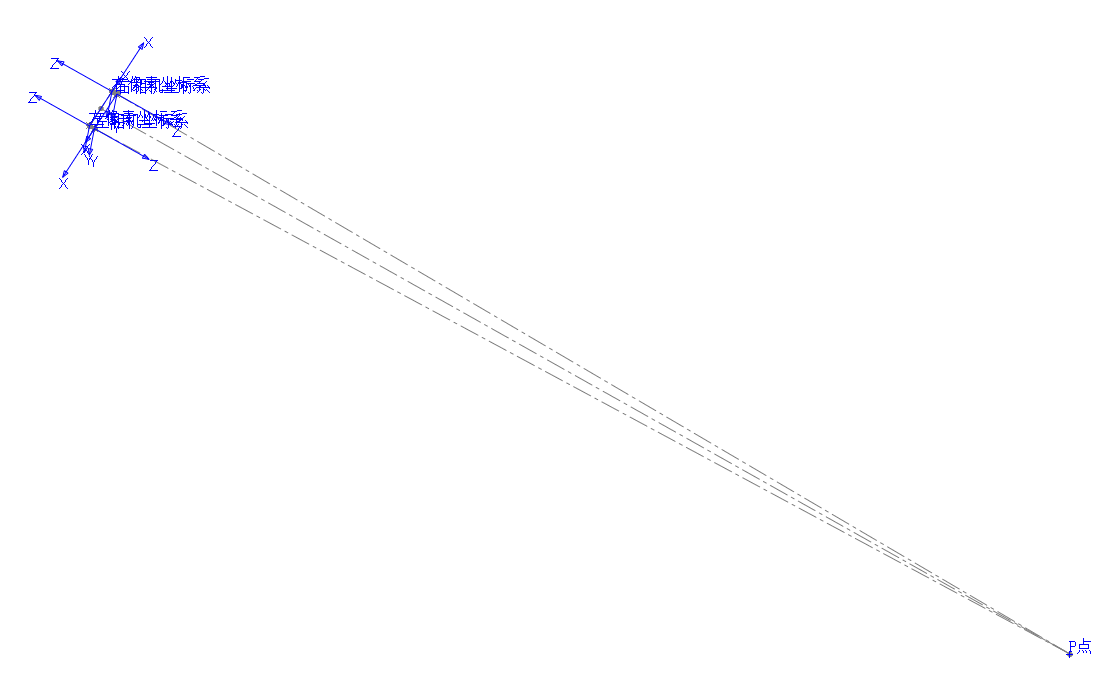
图2:双目仿真模型整体图
已知相机成像面的像元大小为,在仿真模型中,两相机的内参数矩阵均代入相机参数的理想数值:
mtx_l = np.array([[100 / 0.0053, 0, 640, 0], [0, 100 / 0.0053, 512, 0], [0, 0, 1, 0]]) mtx_r = np.array([[100 / 0.0053, 0, 640, 0], [0, 100 / 0.0053, 512, 0], [0, 0, 1, 0]])
待测点的像素坐标可以使用像素坐标系下测量的坐标和成像面长宽的比值来获得。
lp = np.array([1.38201300/0.0053, 2.71360000/0.0053]) rp = np.array([5.4019
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1626
1626

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









