






 该文章详细介绍了基于STM32F103的物联网病房管理系统的硬件配置、RTOS移植、模块驱动和功能实现。系统包括温湿度监测、呼吸灯控制、按键处理、血氧与心率检测以及Modbus通信。通过RTOS实现多任务调度,利用I2C读取AHT20温湿度数据,定时器控制PWM灯光明暗,RTC进行定时开关灯,并通过UART与上位机通信。
该文章详细介绍了基于STM32F103的物联网病房管理系统的硬件配置、RTOS移植、模块驱动和功能实现。系统包括温湿度监测、呼吸灯控制、按键处理、血氧与心率检测以及Modbus通信。通过RTOS实现多任务调度,利用I2C读取AHT20温湿度数据,定时器控制PWM灯光明暗,RTC进行定时开关灯,并通过UART与上位机通信。
文章目录
提示:以下是本篇文章正文内容,下面案例可供参考
一、系统要求
设计一个基于物联网技术的智慧病房管理系统。假设医院住院部的一层病房(走廊两边病房平行分布),病房数量最多60间,每间病房3个床位,编号从1~180号。每间病房可采用的设备如下:STM32F103开发板1块,房间温湿度采集模块1套(I2C接口,AHT20模块),房间自动灯光开关控制器(以PWM方式控制,每天早上7点渐亮,晚上22点渐灭),病人脉搏&血氧检测仪3套(UART接口输出脉搏+血氧的数字值),床头紧急呼叫按键开关3个(按下呼叫)。
每间病房的STM32F103开发板通过UART转485接口,以mobus组网方式,连接到护士监控室的PC电脑上(上位机)。PC电脑上可接收每间病房的温湿度数据(周期为5分钟)、床头紧急呼叫信号、病人脉搏血氧数据(正常状态下30分钟一次采集;当脉搏超过120或血氧值低于90时切换到危重状态下,实时采集),显示在屏幕上并且保存到MySQL数据库里。
设计要求:
1、写出系统设计方案,画出系统功能图。
2、画出病房stm32f103控制模块的电路原理图。
3、设计各功能模块的模拟实现软件,给出主要源代码。
4、总结本系统方案的技术优势和代码特点。
建议(加分项):
采用RTOS(ucos、RTthread-nano等)做多任务软件框架。
使用cubemx完成基本端口参数选择和设计。
采用stm32f103内部flash记录数据,或者其他设计或实现的亮点。
日期读取功能,利用stm32内部日历芯片。
上位机功能只需要设计,不须实现。串口,mobus数据接收可用串口助手等工具软件。但如果有能力设计上位机代码,也有奖励分。
二、问题分析
系统功能
1、RTOS 系统移植
2、温湿度模块数据获取
3、通过定时器定时启动呼吸灯
4、接收按键信号并进行消抖
5、血氧与心率检测
6、modbus 发送数据信息给上位机
系统功能具体内容与模块
1、使用 I2C 读取 AHT20 模块
2、TIM 定时器与 PWM 呼吸灯
3、按键信息接收与消抖
4、UART 转 485 接口与 modbus 通信
5、MAX30102 模块心率与血氧测量
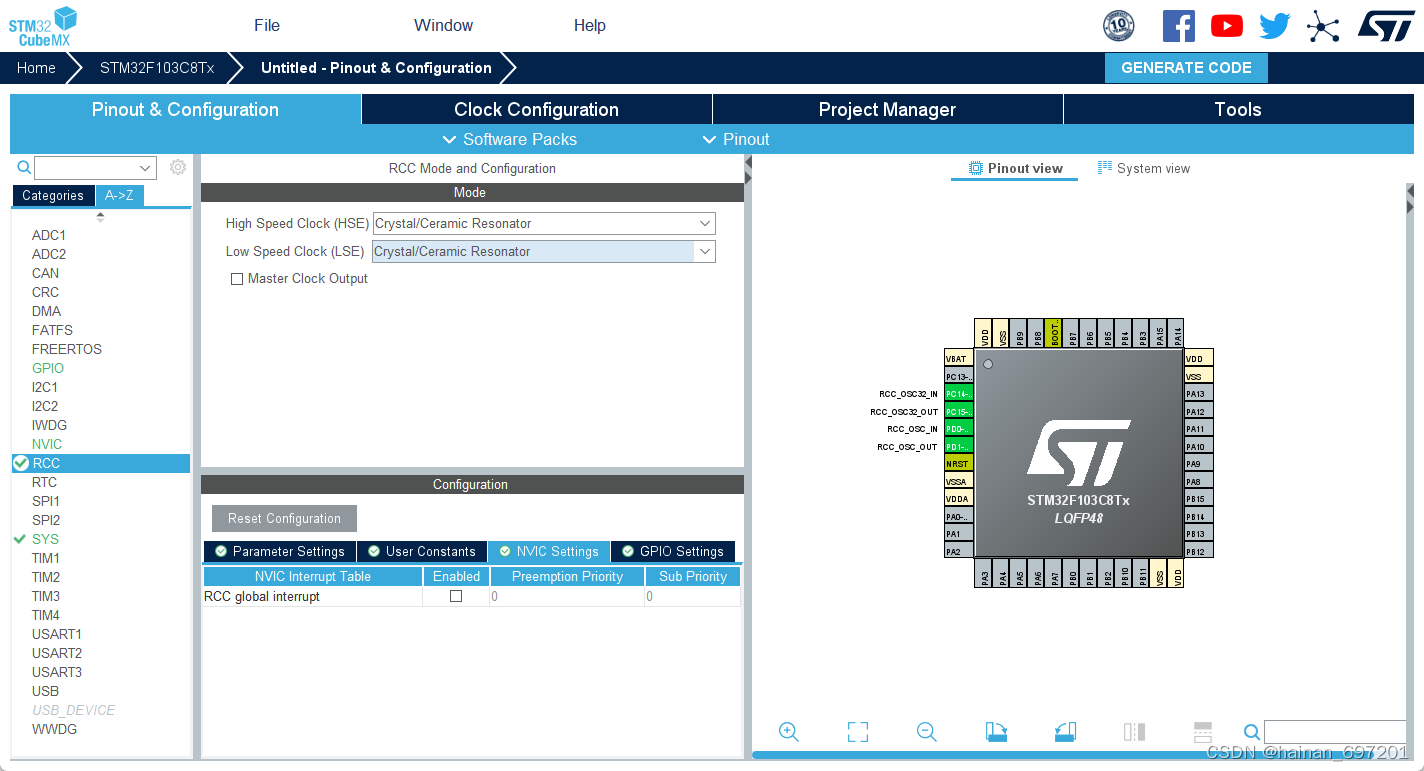
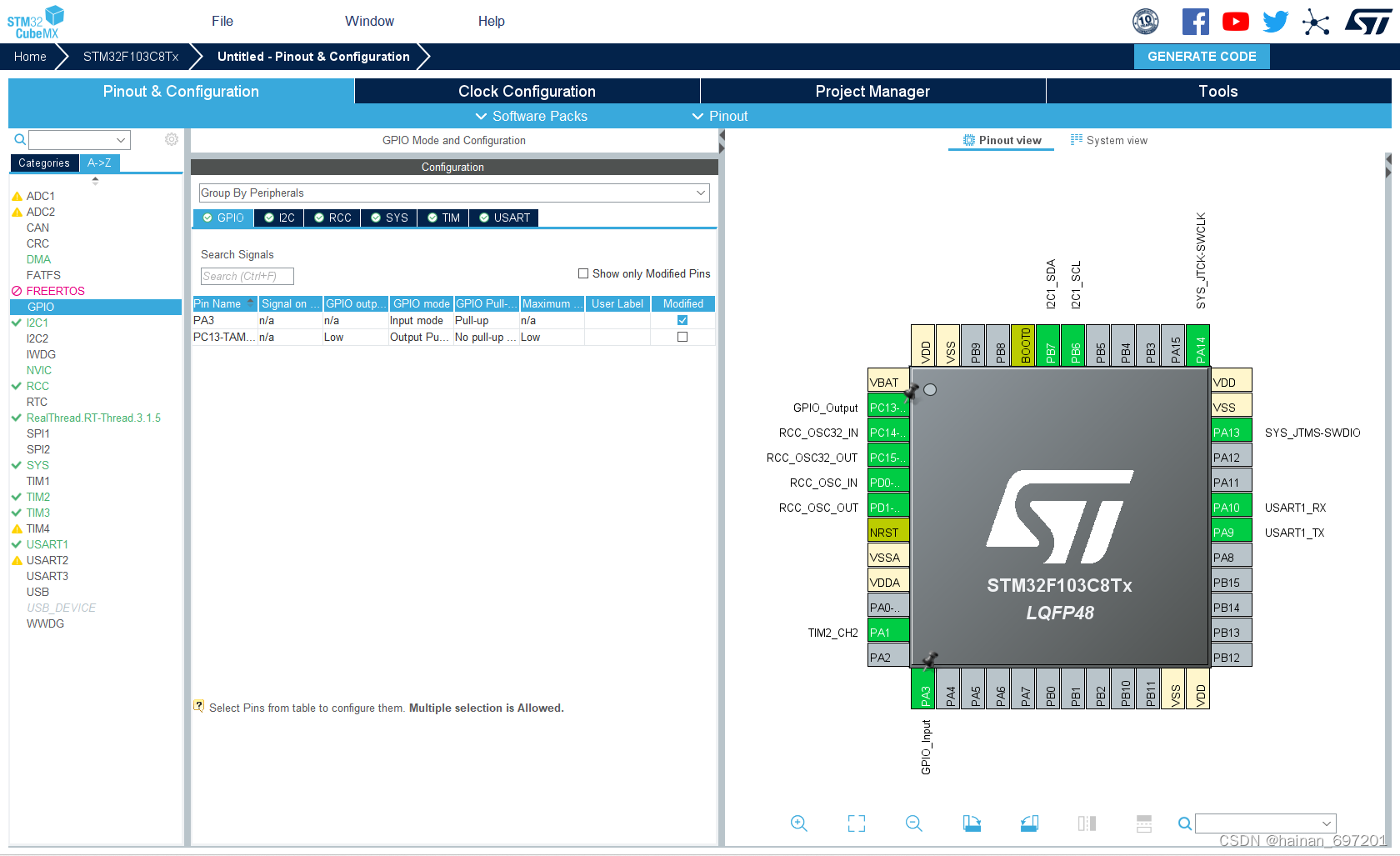
三、基本配置
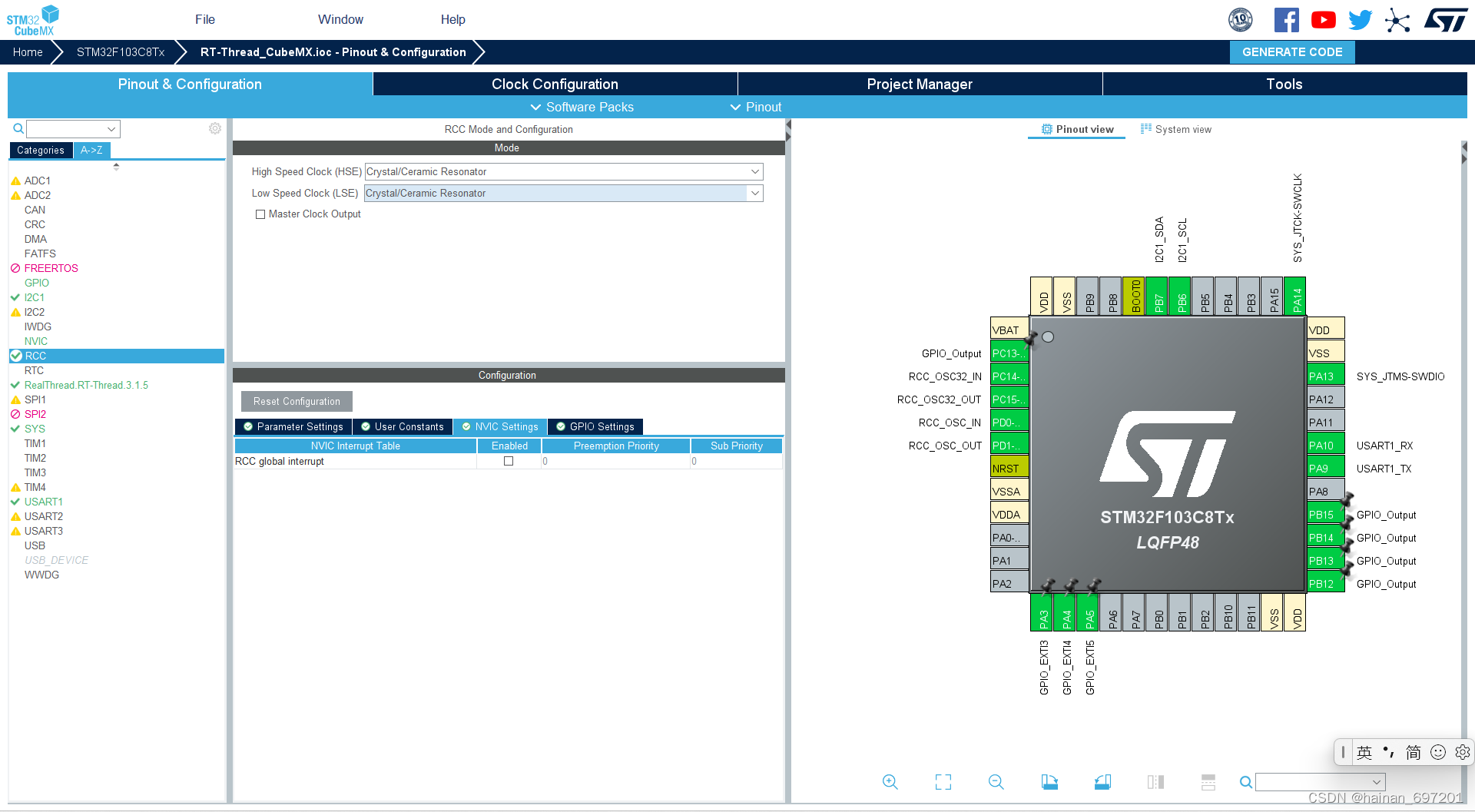
RCC 配置
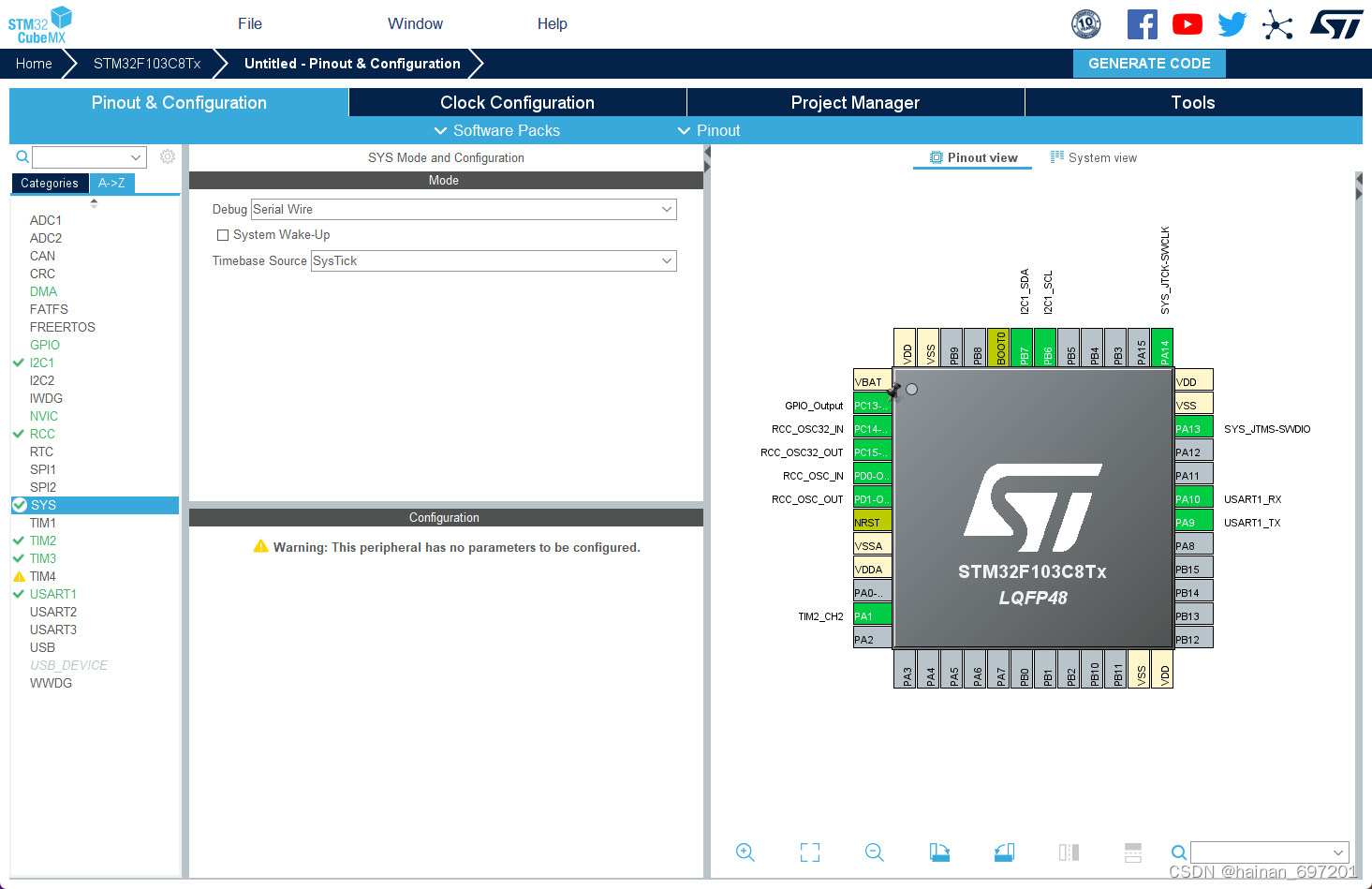
SYS 配置
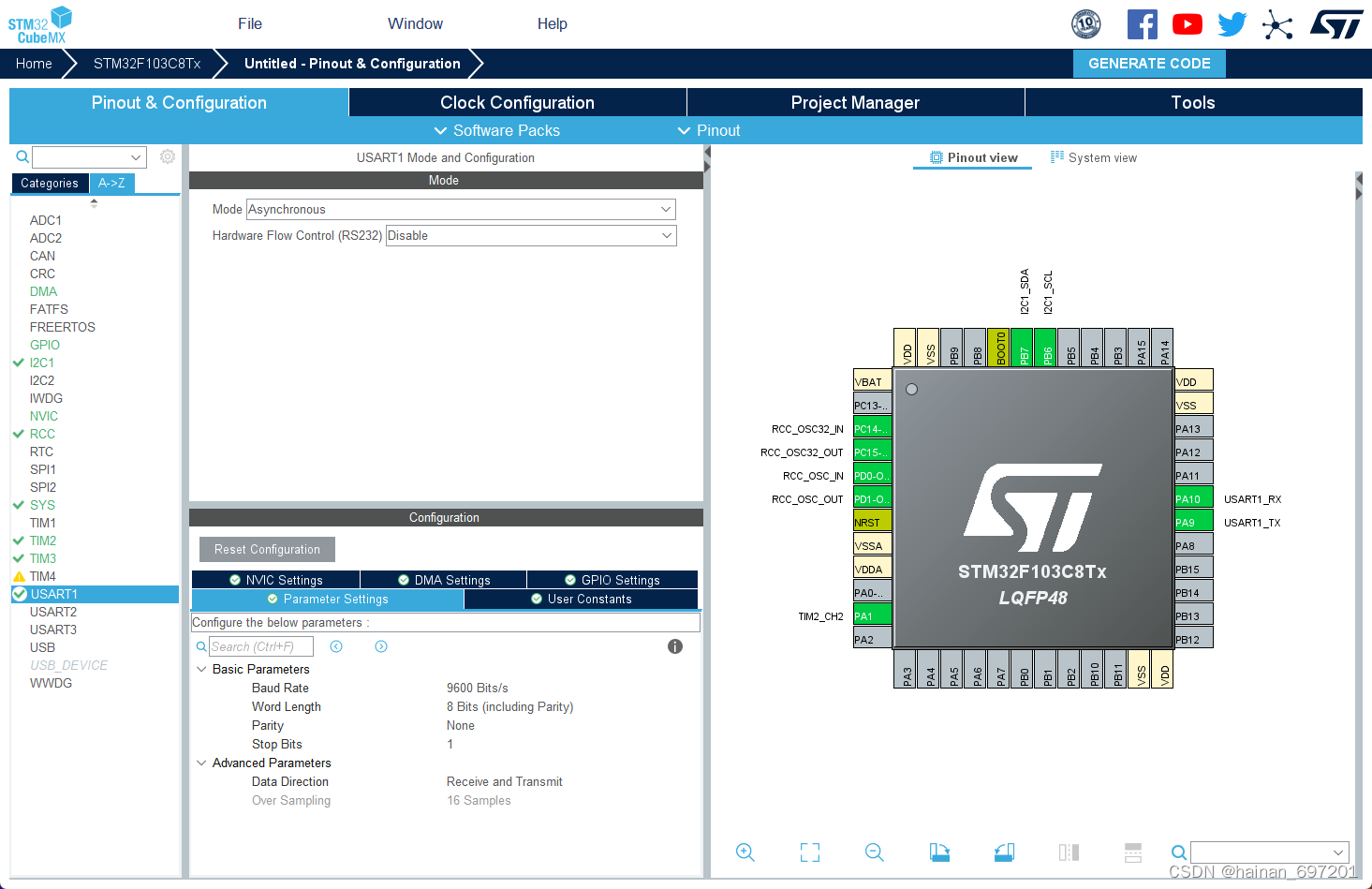
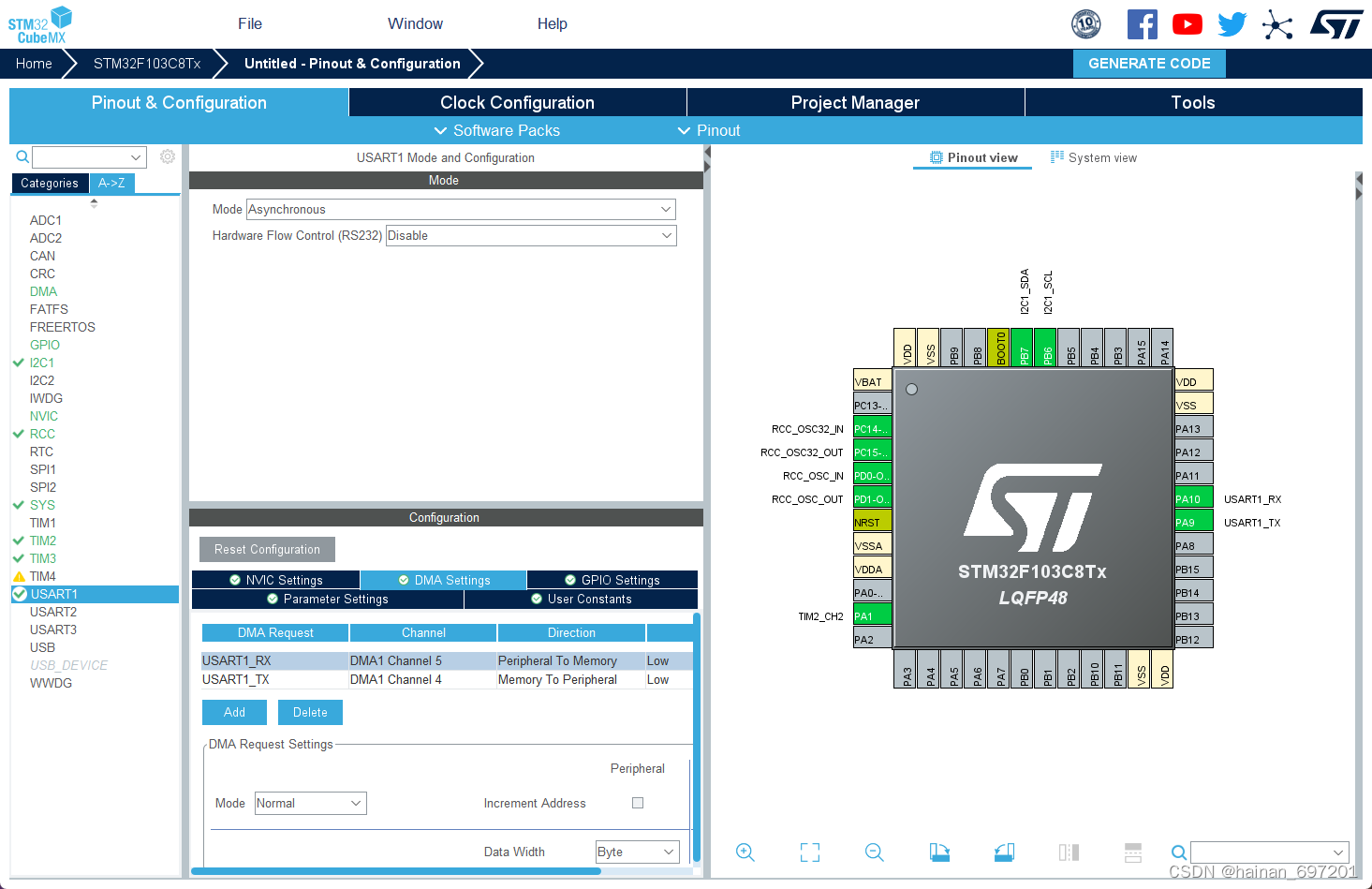
USART1 与 DMA 配置
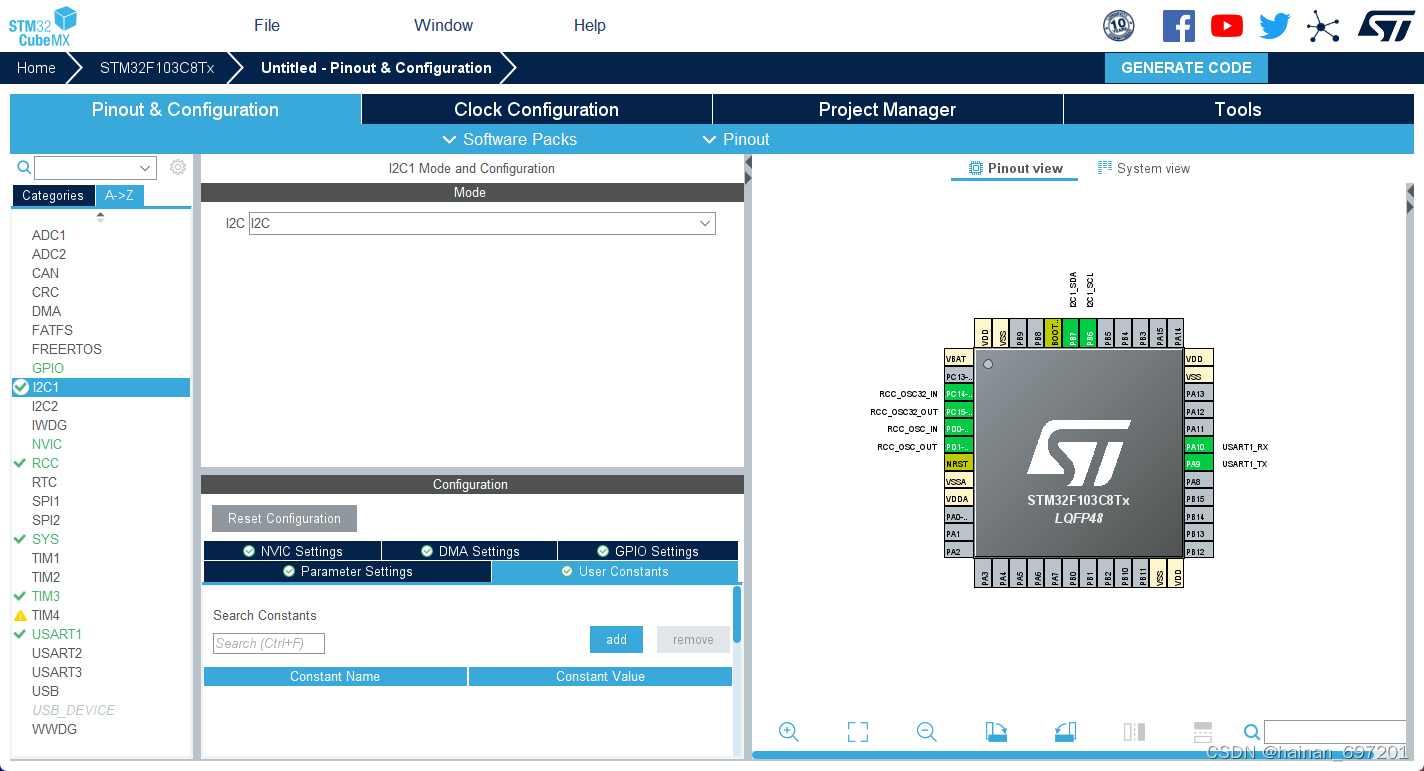
I2C 配置
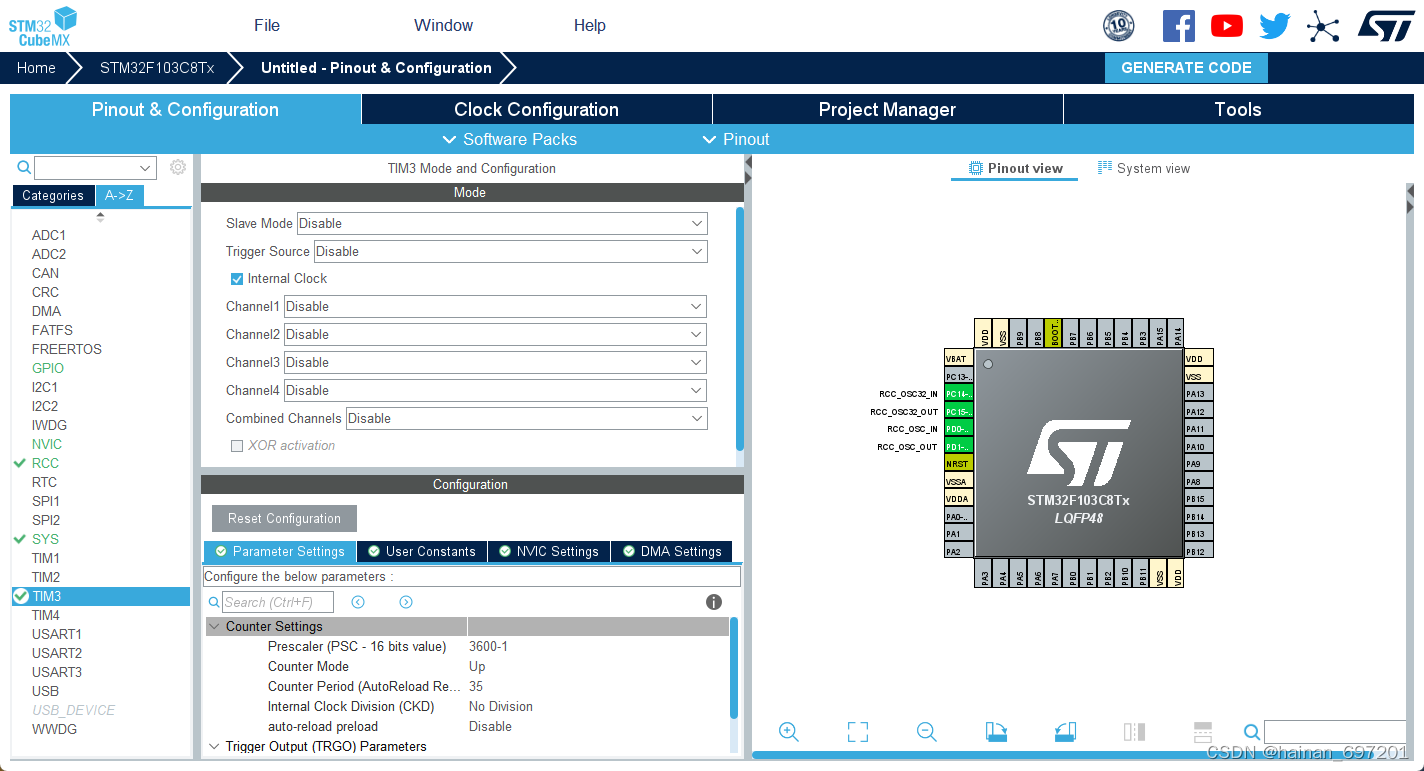
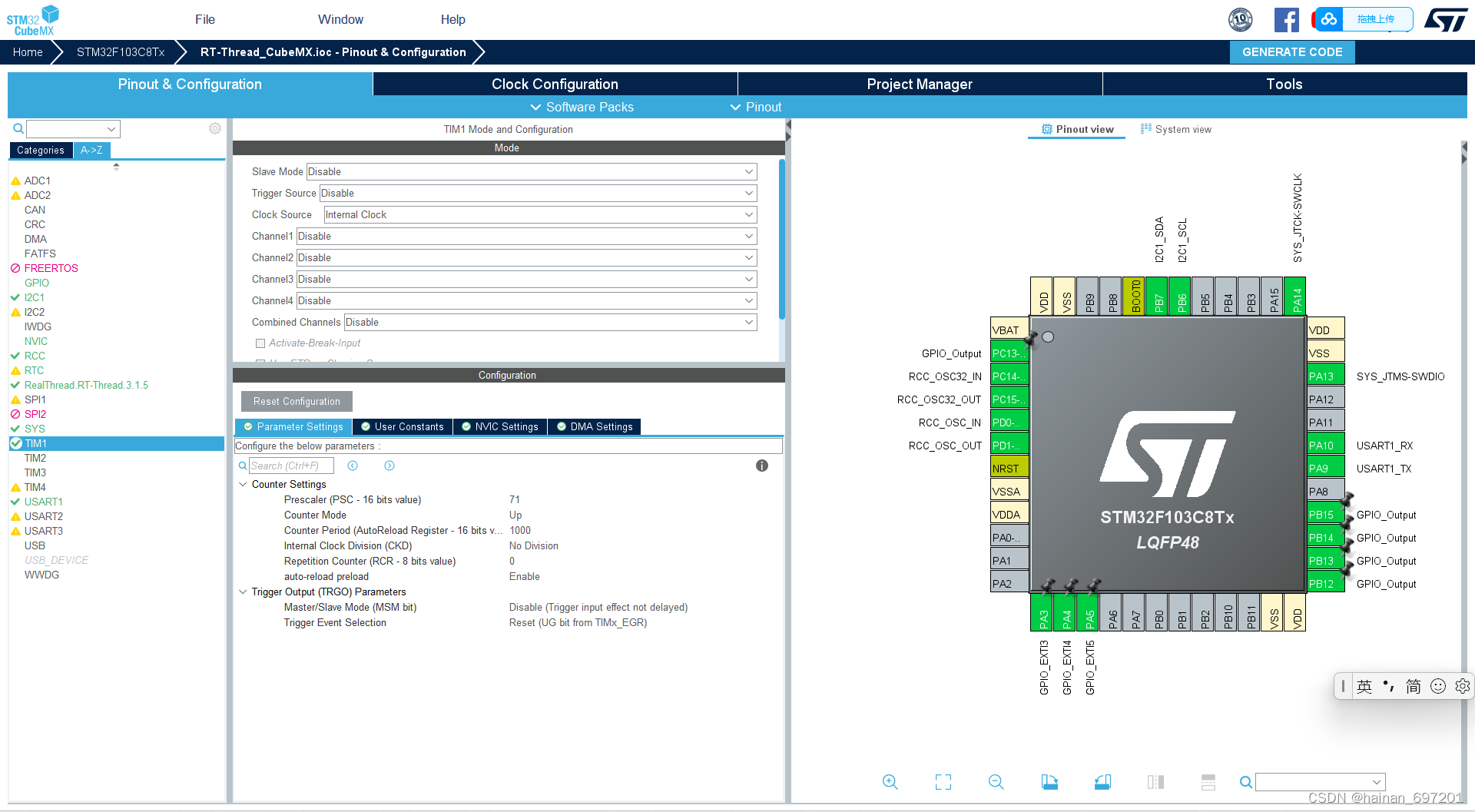
TIM3 配置
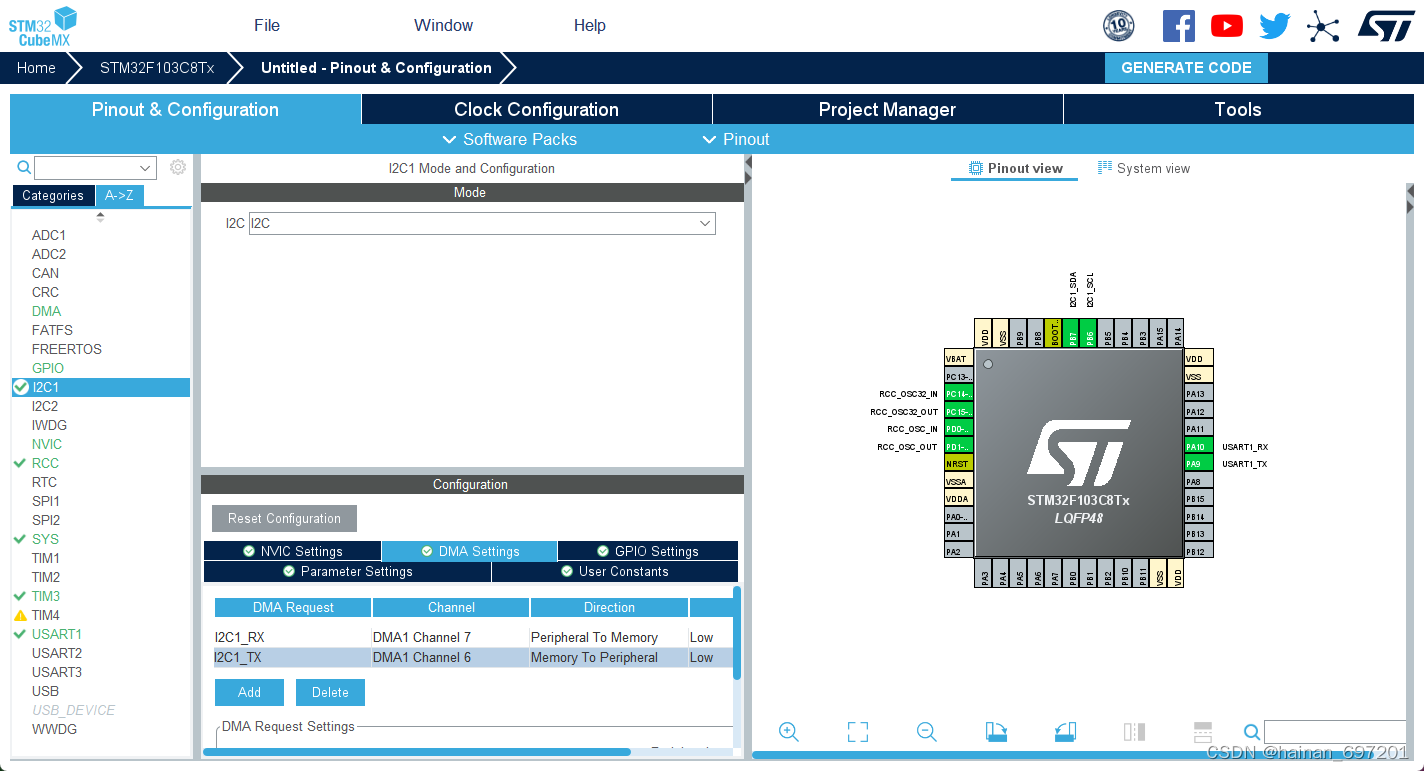
DMA 配置
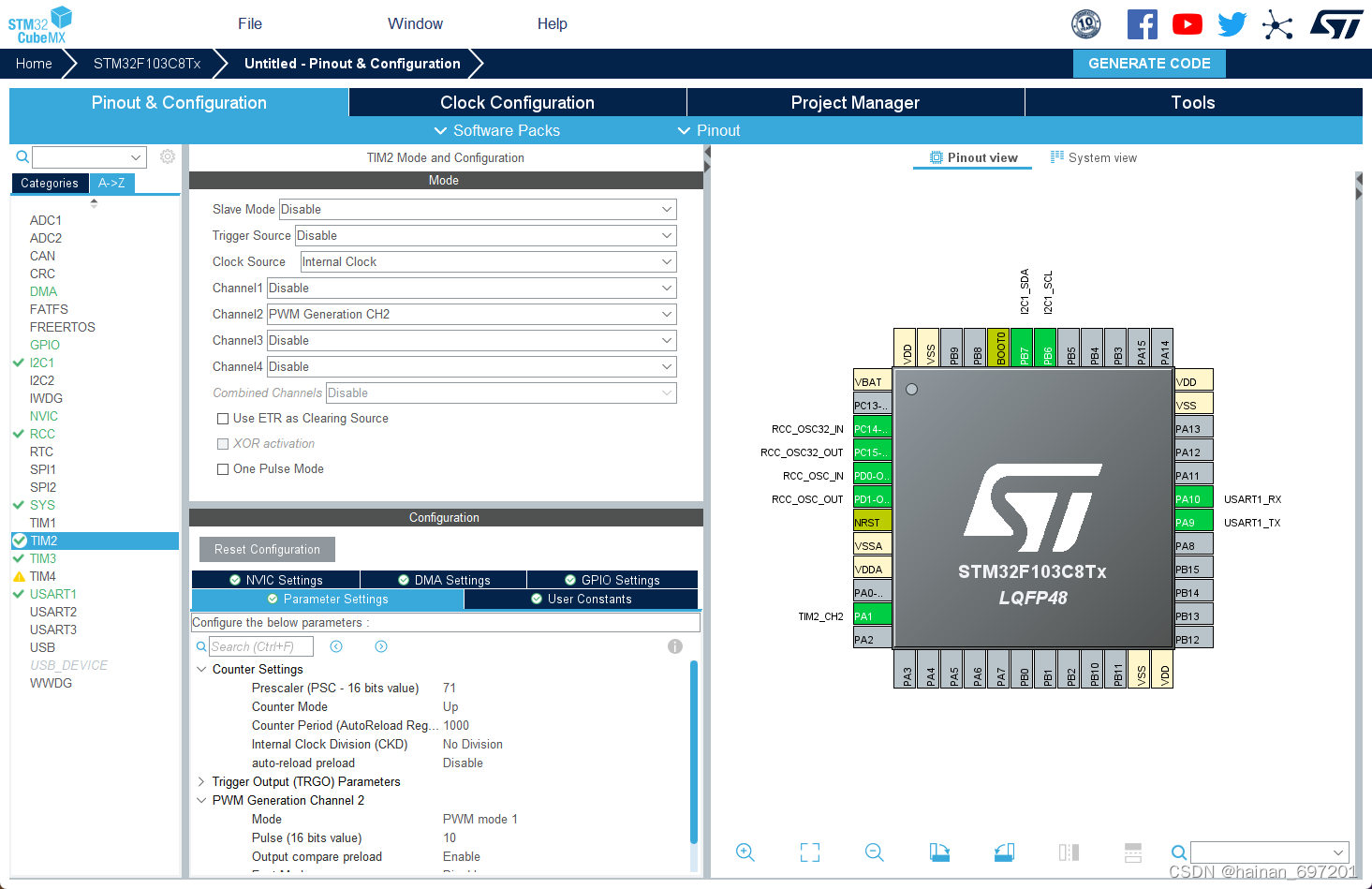
TIM2 与 PWM 配置
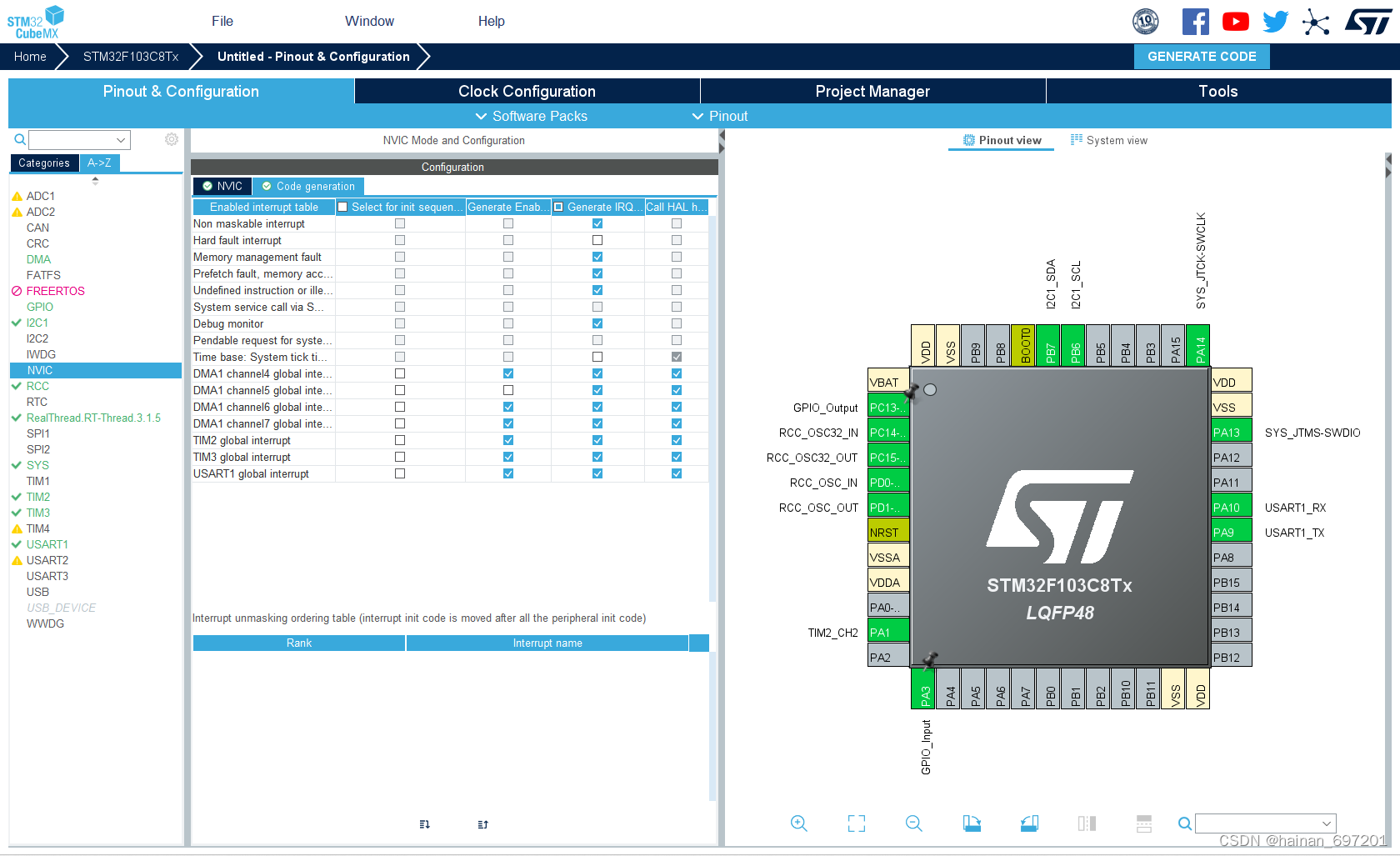
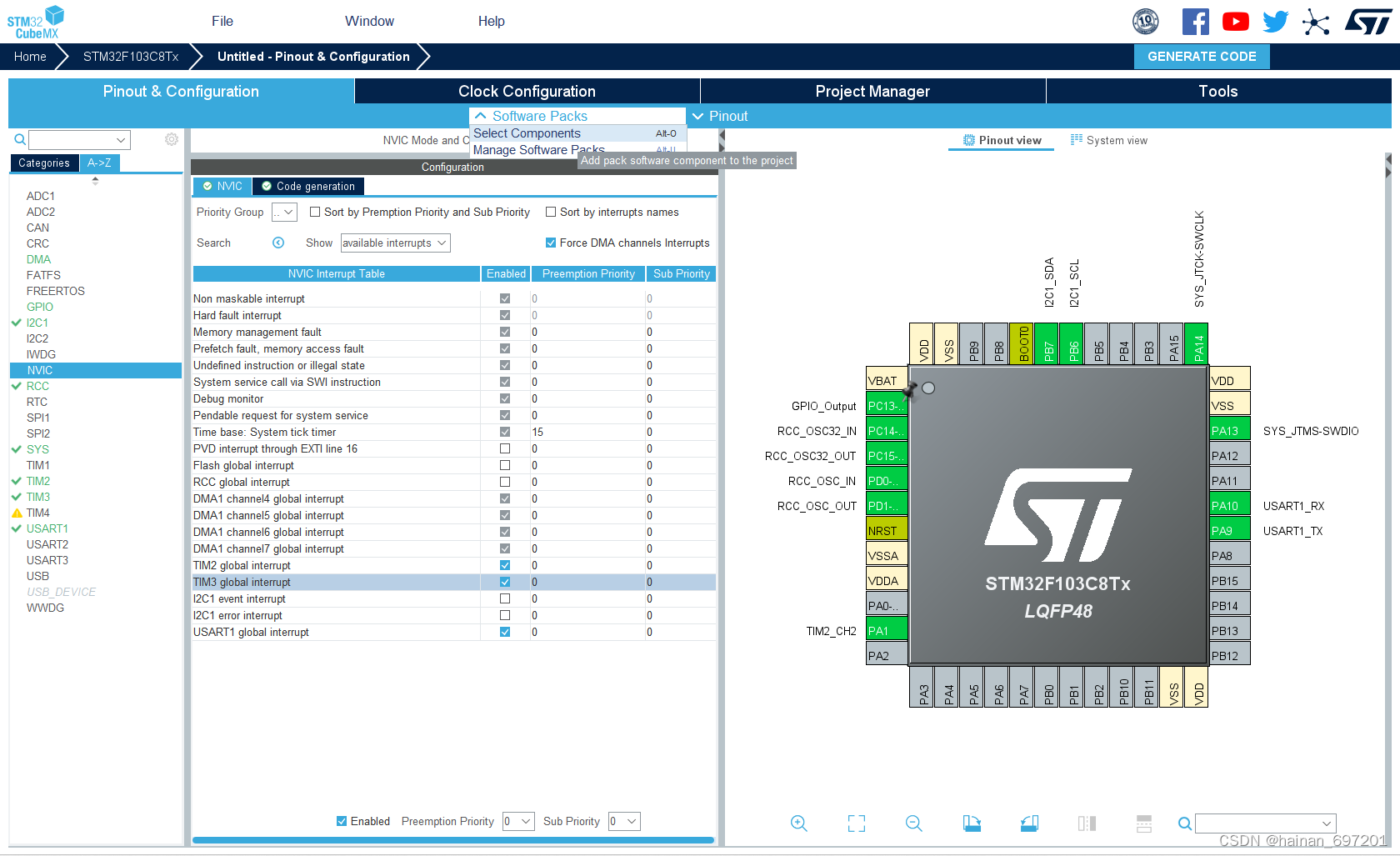
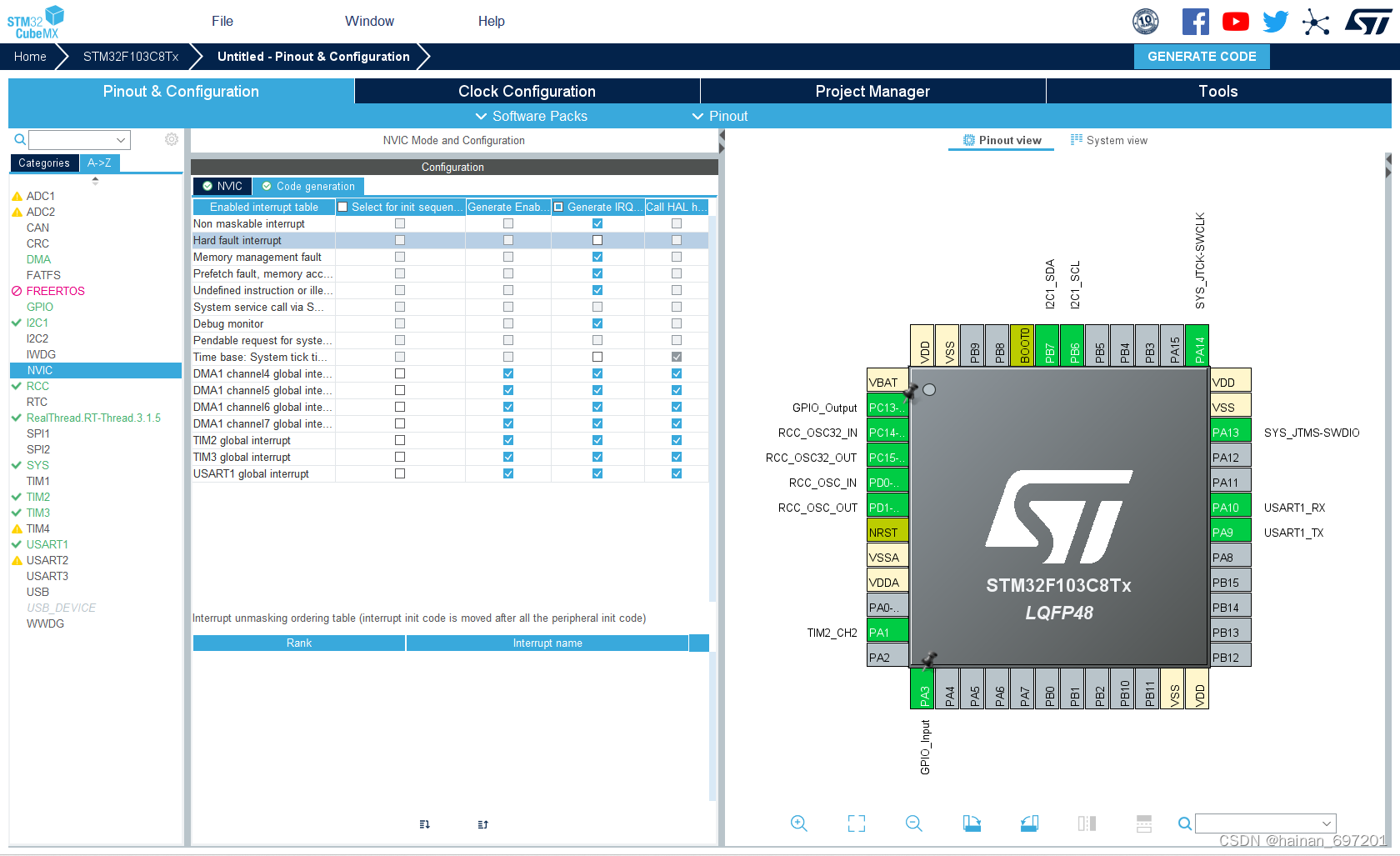
NVIC 配置
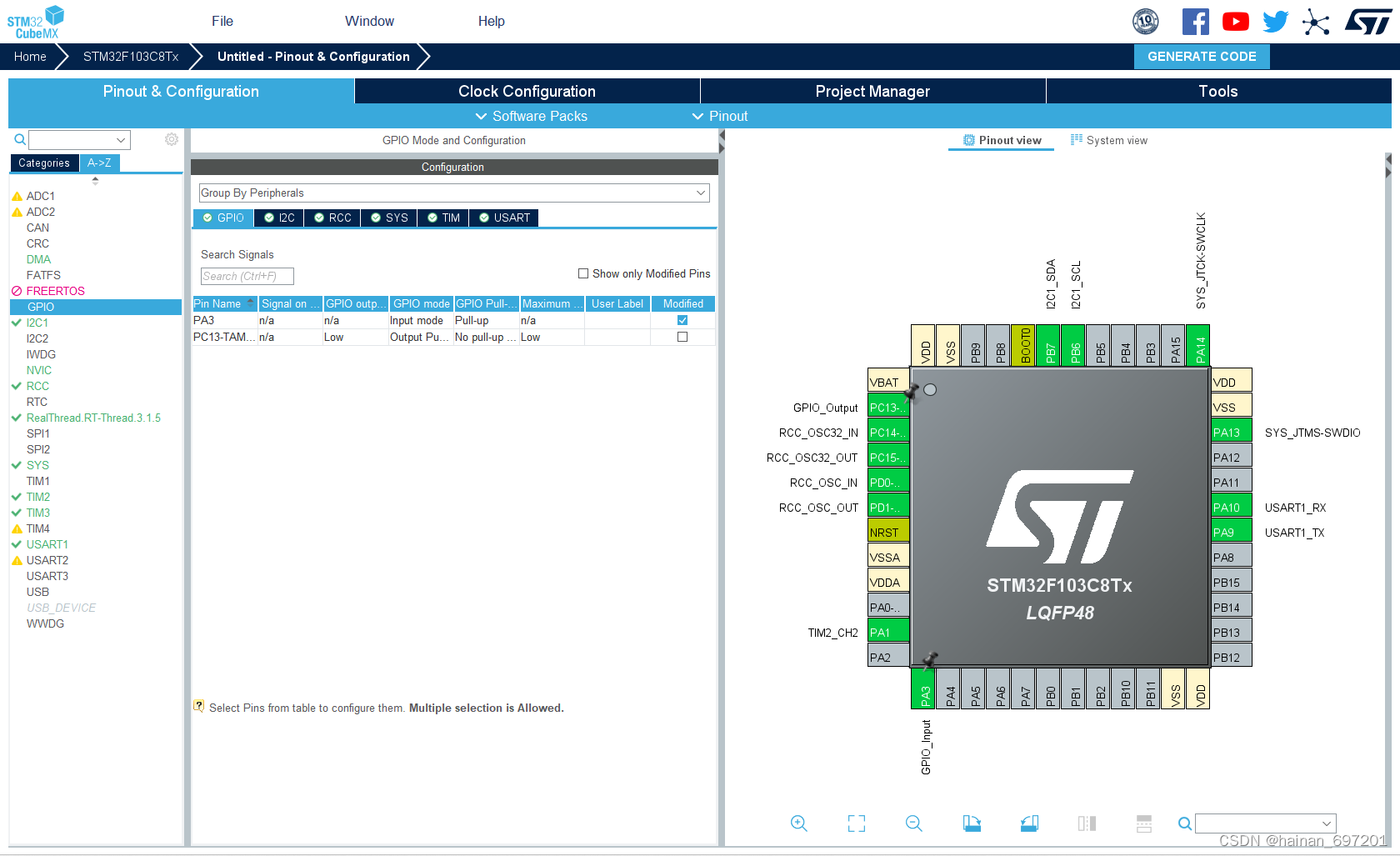
GPIO 配置
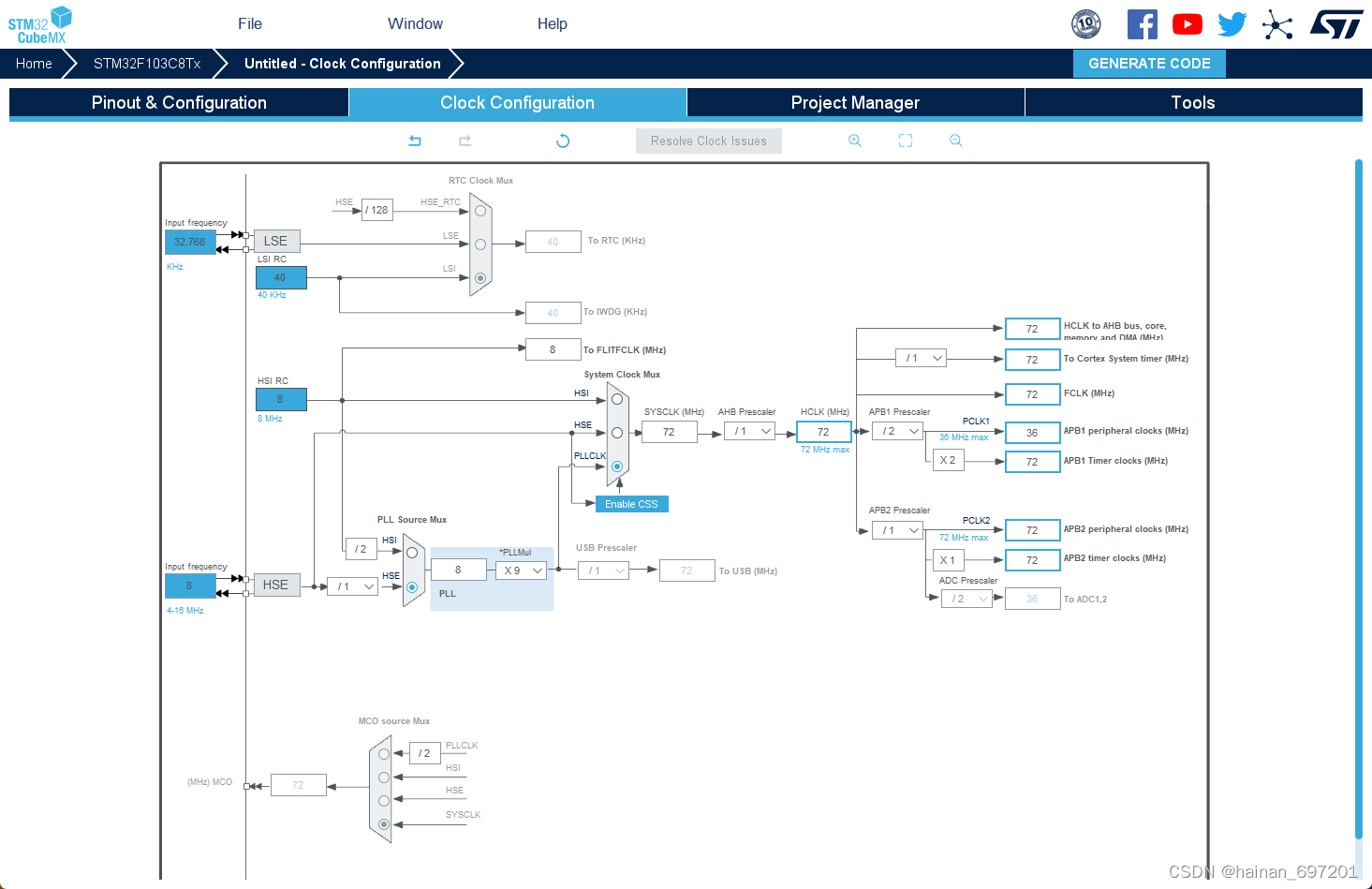
时钟配置
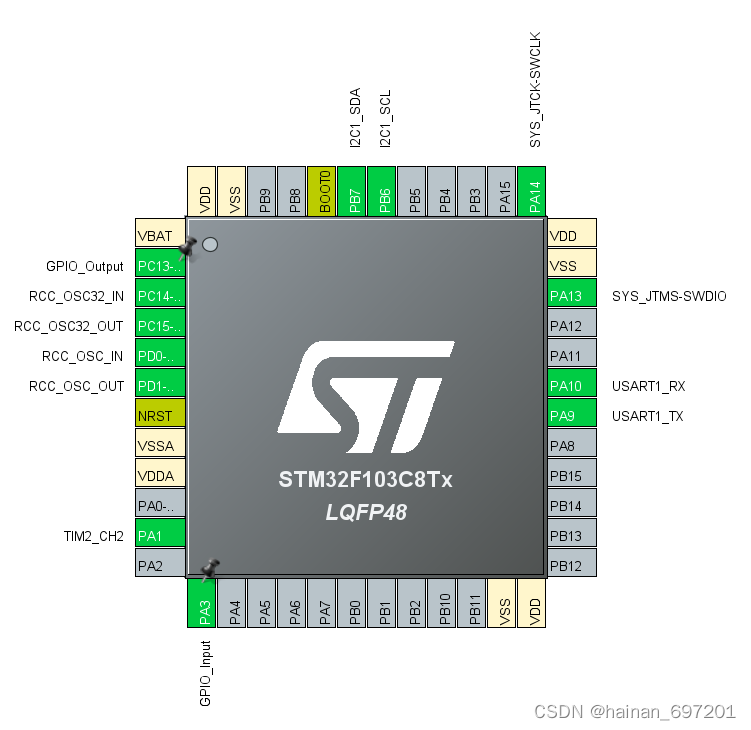
引脚配置
四、RTOS 与 模块驱动 代码配置
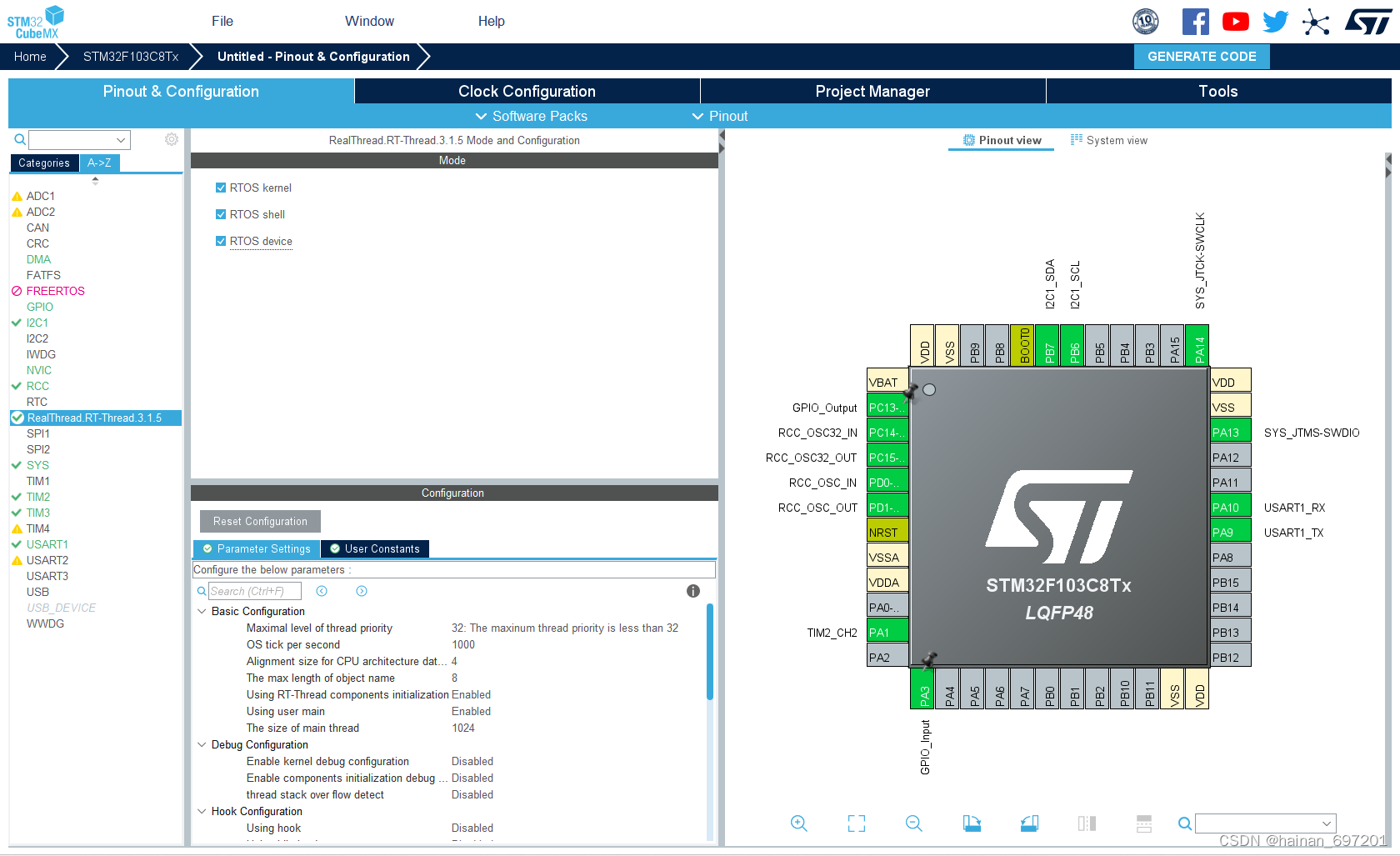
RTOS 配置
这里选择引入 RT-Thread 轻量便捷 :

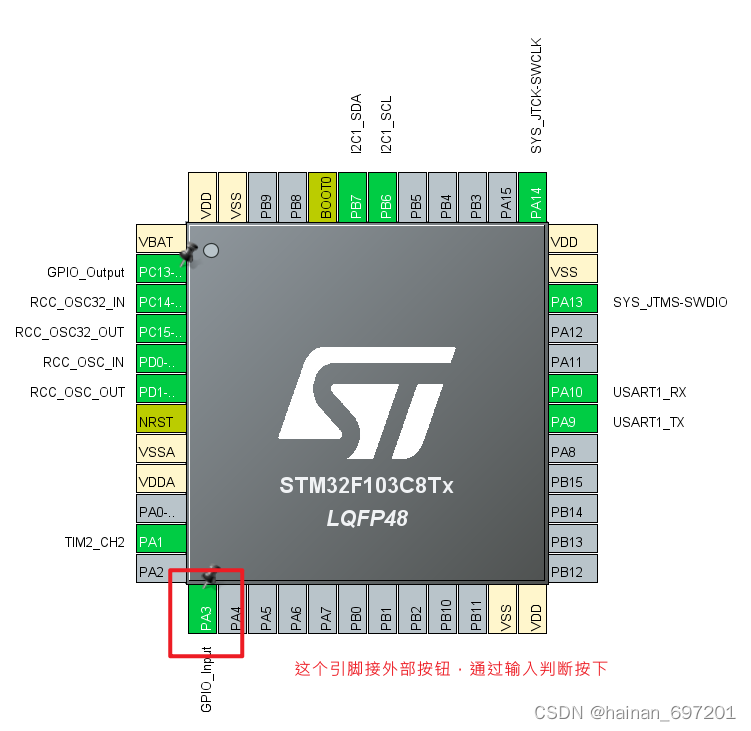
外部按钮配置
五、RTOS、AHT20 与 按钮功能实现
温湿度获取代码设计
首先我们需要引入温湿度驱动头文件:
#include "AHT20.h"
然后我们需要在进程中对温湿度传感器进行初始化,这里在初始化之后,不能立即获取温湿度,需要等待 2 秒或以上,确保数据正确性:
MX_GPIO_Init();
MX_I2C1_Init();
MX_USART1_UART_Init();
uint32_t CT_data[2]={0,0}; // 用于获取温湿度数据
volatile int c1,t1;
rt_thread_delay(50);
AHT20_Init();
rt_thread_delay(2500);
然后我们需要获取经过 CRC 验证的温湿度数据,这里直接调用驱动函数即可:
while(1)
{
AHT20_Read_CTdata_crc(CT_data); //经过CRC校验,读取AHT20的温度和湿度数据 推荐每隔大于1S读一次
c1 = CT_data[0]*1000/1024/1024; //计算得到湿度值c1(放大了10倍)
t1 = CT_data[1]*2000/1024/1024-500;//计算得到温度值t1(放大了10倍)
printf("正在检测");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
printf("\r\n");
printf("温度:%d%d.%d",t1/100,(t1/10)%10,t1%10); // 这里需要对温度进行计算后才能得到我们需要的温度值
printf("湿度:%d%d.%d",c1/100,(c1/10)%10,c1%10); // 这里同样需要对适度进行计算
printf("\r\n");
printf("等待");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
printf("\r\n");
}
RTOS 进程设计
首先新建 app_rt_thread.c 文件,然后引入头文件:
#include "rtthread.h"
#include "main.h"
#include "i2c.h"
#include "usart.h"
#include "gpio.h"
#include "stdio.h"
#include "AHT20.h"
然后我们需要设计进程,这里主进程先设置为串口发送,子进程设置两个,一个是获取温度参数,另一个是控制 PC13 引脚上的板载 LED ,后续会根据系统进程对进行设计:
//初始化线程函数
void MX_RT_Thread_Init(void)
{
//初始化LED1线程
rt_thread_init(&led1_thread,"led1",led1_task_entry,RT_NULL,&rt_led1_thread_stack[0],sizeof(rt_led1_thread_stack),3,20);
//开启线程调度
rt_thread_startup(&led1_thread);
//初始化USART1线程
rt_thread_init(&usart1_thread,"usart1",usart1_task_entry,RT_NULL,&rt_usart1_thread_stack[0],sizeof(rt_usart1_thread_stack),3,20);
//开启线程调度
rt_thread_startup(&usart1_thread);
}
//主任务
void MX_RT_Thread_Process(void)
{
printf("Hello RT_Thread!!!\r\n");
rt_thread_delay(2000);
}
//LED1任务
void led1_task_entry(void *parameter)
{
while(1)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13, GPIO_PIN_RESET);
rt_thread_delay(500);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13, GPIO_PIN_SET);
rt_thread_delay(500);
}
}
//读取温度任务
void usart1_task_entry(void *parameter)
{
MX_GPIO_Init();
MX_I2C1_Init();
MX_USART1_UART_Init();
uint32_t CT_data[2]={0,0}; //
volatile int c1,t1;
rt_thread_delay(50);
AHT20_Init();
rt_thread_delay(2500);
while(1)
{
AHT20_Read_CTdata_crc(CT_data); //经过CRC校验,读取AHT20的温度和湿度数据 推荐每隔大于1S读一次
c1 = CT_data[0]*1000/1024/1024; //计算得到湿度值c1(放大了10倍)
t1 = CT_data[1]*2000/1024/1024-500;//计算得到温度值t1(放大了10倍)
printf("正在检测");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
printf("\r\n");
printf("温度:%d%d.%d",t1/100,(t1/10)%10,t1%10); // 这里需要对温度进行计算后才能得到我们需要的温度值
printf("湿度:%d%d.%d",c1/100,(c1/10)%10,c1%10); // 这里同样需要对适度进行计算
printf("\r\n");
printf("等待");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
rt_thread_delay(100);
printf(".");
printf("\r\n");
}
}
这里直接给出完整代码如下:
点击查看完整 app_rt_thread.c 代码
然后我们在主函数中引入 RT-Thread 必要的头文件并引用函数:
#include "rtthread.h"
extern void MX_RT_Thread_Init(void);
extern void MX_RT_Thread_Process(void);
最后我们直接在主函数中对进程进行初始化,并运行即可,这里直接给出完整主函数:
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_I2C1_Init();
MX_TIM3_Init();
MX_USART1_UART_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
MX_RT_Thread_Init(); // 初始化线程
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
MX_RT_Thread_Process(); // 执行主进程
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
按钮的使用与消抖
首先我们设计按钮在 PA3 引脚,然后在设置 PA4 引脚上外接一个 LED ,这里先令按钮按下反转 PA4 引脚电平,即按下小灯泡点亮,再次按下,小灯泡熄灭,这里直接设计为一个新进程:
struct rt_thread btnclick_thread;
rt_uint8_t rt_btnclick_thread_stack[128];
void btnclick_task_entry(void *parameter);
void btnclick_task_entry(void *parameter){
while(1){
switch(KEY_Scan(0))
{
case KEY1_PRES:
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_4);
break;
default:
break;
}
}
}
初始化线程:
//初始化线程
rt_thread_init(&btnclick_thread,"btnclick",btnclick_task_entry,RT_NULL,&rt_btnclick_thread_stack[0],sizeof(rt_btnclick_thread_stack),3,20);
//开启线程调度
rt_thread_startup(&btnclick_thread);
但是我们不进行按键消抖,这里按键非常容易误触,所以这里进行按键消抖:
#define KEY1 HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_3) //读取按键1
#define KEY1_PRES 1 //KEY1按下
uint8_t KEY_Scan(uint8_t mode)
{
static uint8_t key_up=1;//按键松开标志位
if(key_up&&(KEY1==0))
{
HAL_Delay(10);//去抖动
key_up=0;
if(KEY1==0)return KEY1_PRES;
}
else if(KEY1==1)key_up=1;
return 0;//无按键按下
}
六、定时开关灯与信息获取
这里我们主要实现能够定时开关灯,并且能够获取如下信息:
1、病人按下紧急呼叫信号
2、定时获取病人脉搏血氧数据
定时开关灯
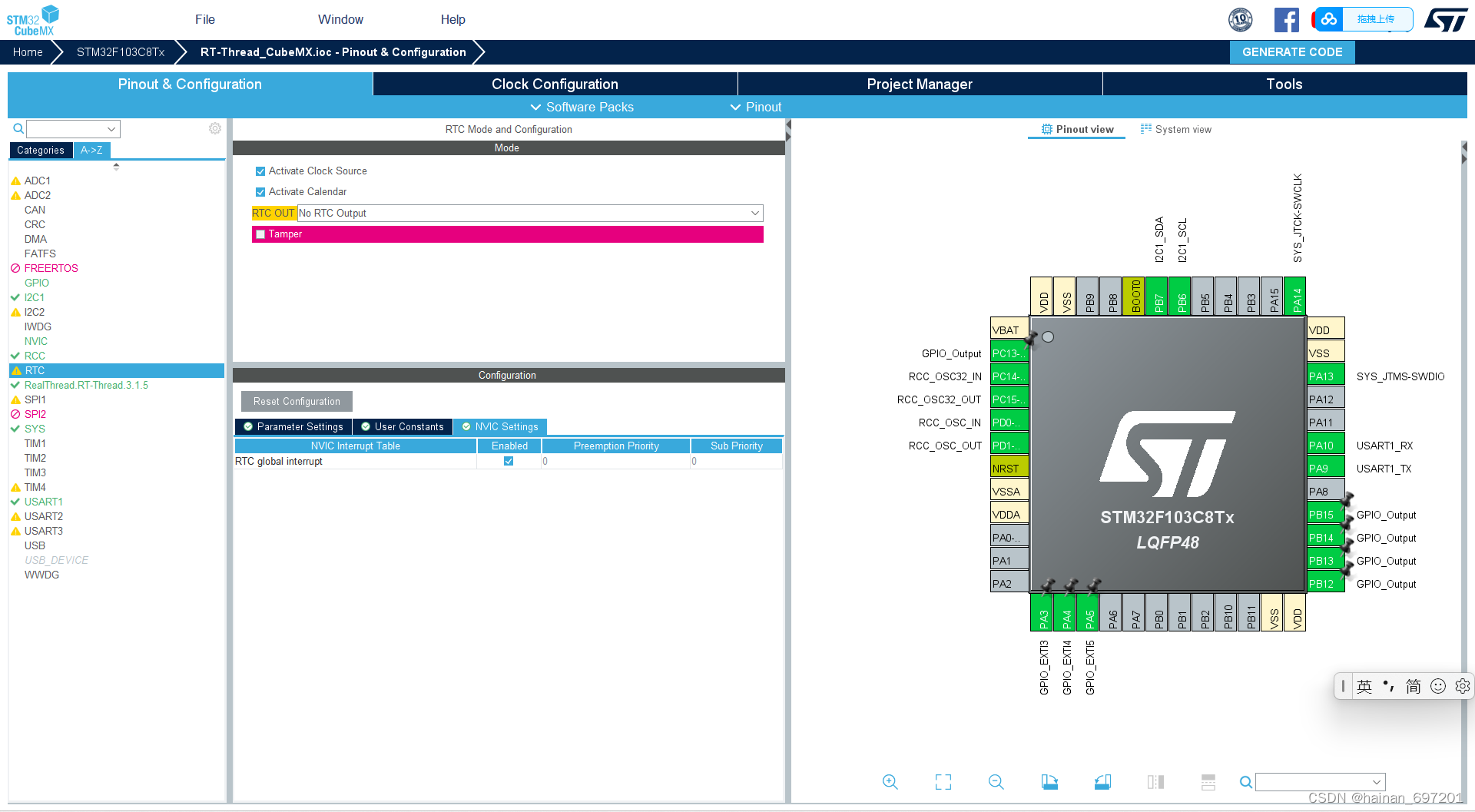
这里要求我们能够实现在早上 7 点开灯,晚上 22 点灭灯,所以我们就要设计 RTC 系统时间与日历读取,确定我们当前的时间与日期,然后判断时间数,最终通过 PWM 实现灯的渐亮与渐灭
这里首先我们需要配置 RTC:
这里先设置两个变量用于获取时间和日期:
RTC_DateTypeDef Date;
RTC_TimeTypeDef Time;
然后我们可以通过时间进行判断从而实现开关灯的效果:
void ledauto_task_entry(void *parameter){
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);
while(1){
HAL_RTC_GetTime(&hrtc,&Time,RTC_FORMAT_BIN);
if(Time.Hours == 7&&Time.Minutes == 0&&Time.Seconds == 0){
printf("开灯!");
for(uint16_t i=1;i<500;i++){
htim2.Instance->CCR2 = i;
rt_thread_delay(5);
}
}
else if(Time.Hours == 22&&Time.Minutes == 0&&Time.Seconds == 0){
printf("关灯!");
for(uint16_t i=499;i>=1;i--){
htim2.Instance->CCR2 = i;
rt_thread_delay(5);
}
}
}
}
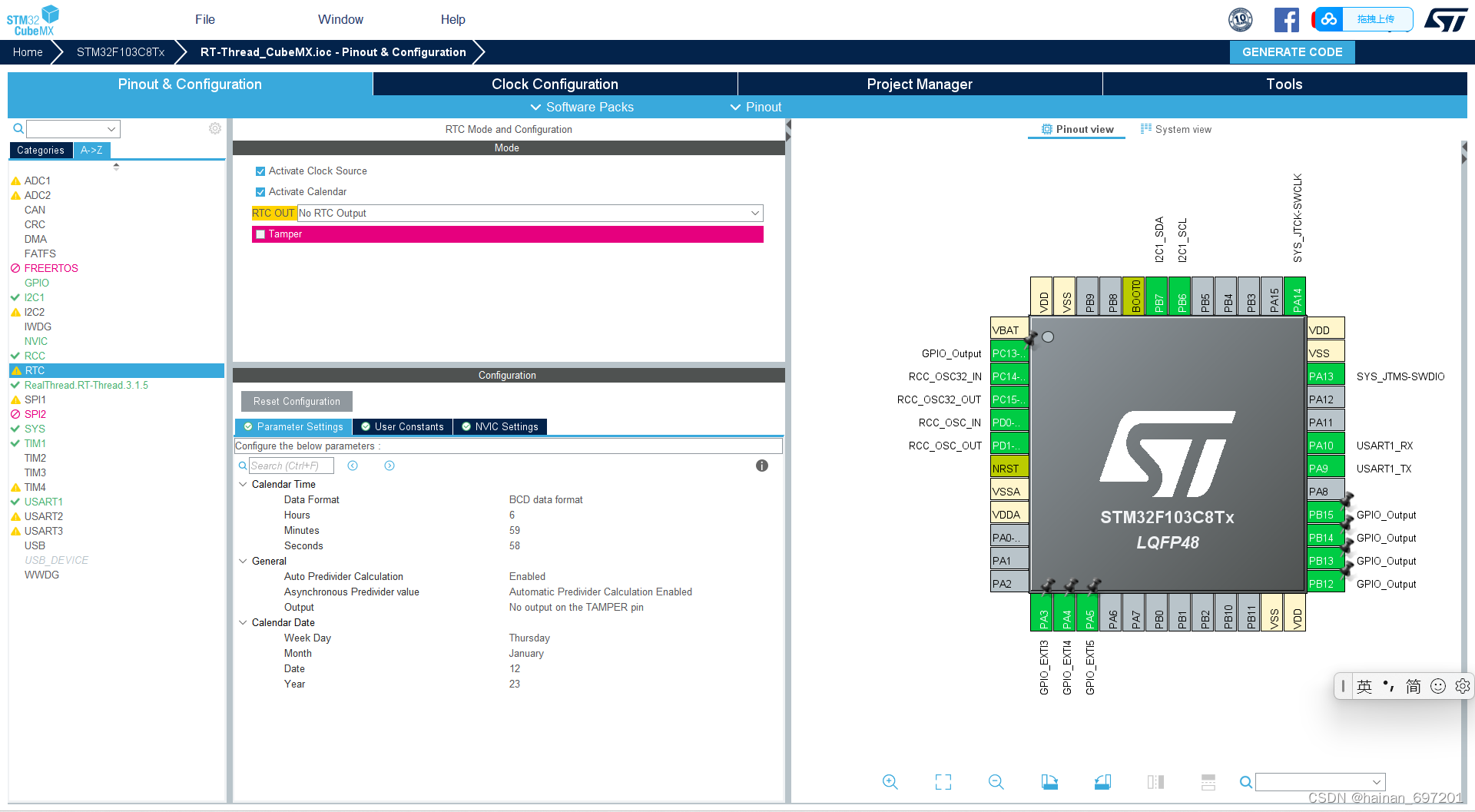
根据先前博客内容来写通过RTC读取日历和时间的函数:
void MX_RTC_Init(void)
{
/* USER CODE BEGIN RTC_Init 0 */
/* USER CODE END RTC_Init 0 */
RTC_TimeTypeDef sTime = {0};
RTC_DateTypeDef DateToUpdate = {0};
/* USER CODE BEGIN RTC_Init 1 */
__HAL_RCC_BKP_CLK_ENABLE();// 开启后背区域时钟
__HAL_RCC_PWR_CLK_ENABLE();// 开启电源时钟
/* USER CODE END RTC_Init 1 */
/** Initialize RTC Only
*/
hrtc.Instance = RTC;
hrtc.Init.AsynchPrediv = RTC_AUTO_1_SECOND;
hrtc.Init.OutPut = RTC_OUTPUTSOURCE_NONE;
if (HAL_RTC_Init(&hrtc) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN Check_RTC_BKUP */
if(HAL_RTCEx_BKUPRead(&hrtc,RTC_BKP_DR1)!= 0x5051)
{
/* USER CODE END Check_RTC_BKUP */
/** Initialize RTC and set the Time and Date
*/
sTime.Hours = 0x7;
sTime.Minutes = 0x0;
sTime.Seconds = 0x0;
if (HAL_RTC_SetTime(&hrtc, &sTime, RTC_FORMAT_BCD) != HAL_OK)
{
Error_Handler();
}
DateToUpdate.WeekDay = RTC_WEEKDAY_THURSDAY;
DateToUpdate.Month = RTC_MONTH_JANUARY;
DateToUpdate.Date = 0x12;
DateToUpdate.Year = 0x23;
if (HAL_RTC_SetDate(&hrtc, &DateToUpdate, RTC_FORMAT_BCD) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN RTC_Init 2 */
__HAL_RTC_SECOND_ENABLE_IT(&hrtc,RTC_IT_SEC); //开启RTC时钟秒中断
datebuff = DateToUpdate; //把日期数据拷贝到自己定义的data中
HAL_RTCEx_BKUPWrite(&hrtc, RTC_BKP_DR1, 0x5051);//向指定的后备区域寄存器写入数据
HAL_RTCEx_BKUPWrite(&hrtc, RTC_BKP_DR2, (uint16_t)datebuff.Year);
HAL_RTCEx_BKUPWrite(&hrtc, RTC_BKP_DR3, (uint16_t)datebuff.Month);
HAL_RTCEx_BKUPWrite(&hrtc, RTC_BKP_DR4, (uint16_t)datebuff.Date);
HAL_RTCEx_BKUPWrite(&hrtc, RTC_BKP_DR5, (uint16_t)datebuff.WeekDay);
}
else
{
datebuff.Year = HAL_RTCEx_BKUPRead(&hrtc, RTC_BKP_DR2);
datebuff.Month = HAL_RTCEx_BKUPRead(&hrtc, RTC_BKP_DR3);
datebuff.Date = HAL_RTCEx_BKUPRead(&hrtc, RTC_BKP_DR4);
datebuff.WeekDay = HAL_RTCEx_BKUPRead(&hrtc, RTC_BKP_DR5);
DateToUpdate = datebuff;
if (HAL_RTC_SetDate(&hrtc, &DateToUpdate, RTC_FORMAT_BIN) != HAL_OK)
{
Error_Handler();
}
__HAL_RTC_SECOND_ENABLE_IT(&hrtc,RTC_IT_SEC); //开启RTC时钟秒中断
}
getRealTime();
/* USER CODE END RTC_Init 2 */
}
然后我们需要在运行时,实时获取一次时间:
void getRealTime(void)
{
HAL_RTC_GetTime(&hrtc, &time, RTC_FORMAT_BIN);
HAL_RTC_GetDate(&hrtc, &datebuff, RTC_FORMAT_BIN);
HAL_RTCEx_BKUPWrite(&hrtc, RTC_BKP_DR2, (uint16_t)datebuff.Year);
HAL_RTCEx_BKUPWrite(&hrtc, RTC_BKP_DR3, (uint16_t)datebuff.Month);
HAL_RTCEx_BKUPWrite(&hrtc, RTC_BKP_DR4, (uint16_t)datebuff.Date);
HAL_RTCEx_BKUPWrite(&hrtc, RTC_BKP_DR5, (uint16_t)datebuff.WeekDay);
}
void HAL_RTCEx_RTCEventCallback(RTC_HandleTypeDef *hrtc)
{
if(hrtc->Instance == RTC)
{
getRealTime();
}
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









