






摘要——集成感知与通信(ISAC)被公认为未来无线网络的关键使能技术。为揭示ISAC系统的根本性能极限,本文从率失真理论的角度出发,研究了矢量高斯信道下感知与通信(S&C)的确定性-随机性权衡。我们将ISAC信号建模为携带信息的随机矩阵,其实现对于感知接收机是完全已知的,但对通信接收机是未知的。我们刻画了基于随机ISAC信号条件的感知互信息,并证明其为感知失真度量提供了一个普适下界。进一步,我们证明当ISAC信号的样本协方差矩阵为确定性时,该失真下界可被最小化。随后通过将无线感知解释为非协作源信道编码,我们阐明了上述主要结论的内在机理,从而揭示了ISAC系统中S&C的确定性-随机性权衡。最后,通过分析目标响应矩阵估计的具体案例,我们给出了达到失真下界的充分条件。
关键词——集成感知与通信,率失真理论,性能极限
I 引言
A 研究背景与动机
未来无线网络除通信功能外,还需具备高精度、鲁棒的无线感知能力,以支持从智能交通到智慧城市与家庭等新兴应用。为此,**集成感知与通信(ISAC)**系统——通过硬件、频谱和信号资源的共享实现感知与通信(S&C)协同——被视为6G与Wi-Fi-7网络的革命性技术之一[1]。尽管近年来ISAC信号处理与波形设计已得到广泛研究,但其性能极限及由此产生的S&C权衡机制尚未被充分理解,这一直是学术界悬而未决的难题[2]。
B 现有研究成果
S&C均以信号与信息处理为核心,其理论基础构建于估计、检测与信息论之上。具体而言,感知旨在从观测回波信号中提取目标的有用信息,而通信则致力于从接收信号中恢复发射端编码的信息。数十年来,尽管S&C被视作"信息论中的奇异组合"[3]而紧密关联,二者仍作为独立研究领域发展。事实上,S&C的基础理论与性能指标可通过多种方式建立联系:最著名的成果是I-MMSE方程[4],它表明在标量高斯信道中,输入输出间互信息(MI)关于信噪比(SNR)的导数等于从输出估计输入的最小均方误差(MMSE)。该方程亦可从连接微分熵与Fisher信息的De Bruijn恒等式[4]推导而来。此外,Stein引理[5]揭示了检测概率与相对熵之间的内在关联。
为深入揭示ISAC系统的性能极限,近期研究将单基地雷达感知建模为依赖于目标状态的延迟反馈信道[6]。此时,ISAC传输可视为联合状态估计与通信问题,其性能极限由通信容量与状态估计失真的权衡决定。与本文更相关的是,文献[7][8]通过克拉美罗界(CRB)-通信速率区域刻画ISAC性能极限,首次揭示了S&C间的根本性确定性-随机性权衡(DRT)。
C 本文贡献
本文从率失真理论视角重新审视ISAC性能权衡。特别地,我们将文献[7][8]中通信速率与CRB的DRT推广至任意定义良好的感知失真度量。首先,我们将ISAC发射端(Tx)信号建模为携带通信信息的随机信号——对于感知接收端(Rx)而言,该信号作为参考波形完全已知(如典型雷达系统);而对于通信接收端(Rx)则完全未知。
通过分析基于随机变化ISAC信号条件的感知互信息(MI),我们证明其为明确定义的感知失真度量(如均方误差MSE和检测概率)提供了下界。进而,我们通过理论证明:当ISAC信号的样本协方差矩阵为**确定性**时,该失真下界可被最小化——此时由于信号随机性降低(等效于信号自由度(DoFs)减少),可实现通信速率将随之下降,从而揭示了ISAC系统中**普适的确定性-随机性权衡(DRT)**。更进一步,我们从新视角对主要结论进行讨论:将ISAC系统中的感知操作解释为**非协作源信道编码系统**,其中目标作为非协作源以被动方式将其参数信息传输至感知接收端(Rx)。最后,我们通过目标响应矩阵估计的实例分析,给出了所提失真下界可达的充分条件。
II 系统模型与性能指标
A 系统模型
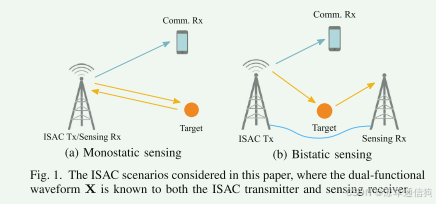
考虑一个由ISAC发射端(Tx)、感知接收端(Rx)、通信接收端(Rx)及单个或多个目标组成的**点对点(P2P)下行ISAC系统**。ISAC Tx发射双功能信号以同时实现目标感知与下行通信。在矢量高斯信道下,感知Rx与通信Rx接收的信号可分别建模为:
(1)
其中:
为ISAC Tx发射的双功能信号矩阵,
表示发射天线数,
为离散样本数
和
分别为感知与通信信道矩阵,
、
对应接收端天线数
和
为零均值高斯白噪声矩阵,方差分别为
和
表示目标参数向量(如角度、距离、速度),
为参数维度
感知信道被建模为目标参数
的确定性函数。由于感知Rx通常与ISAC Tx共址(单站感知),或通过光纤连接到ISAC发射机(双态感知),双功能信号X对ISAC发射机和感知接收机都是已知的,这对大多数雷达应用是有效的。另一方面,由于X包含为通信接收机编码的有用信息,它对通信接收机是未知的。因此,我们将X建模为一个随机矩阵,其分布为
,其实现对ISAC发射机和感知接收机是已知的,但对通信接收机未知。我们还假设
,并将X的样本和统计协方差矩阵分别表示为
和
。
相应地,我们在ISAC中定义S&C任务如下:
- 感知任务:从观测信号
估计
,其中
- 通信任务:在通信接收机处从接收信号
中恢复X中包含的有用信息,已知(或统计知识)信道
。
在不失一般性的情况下,我们假设,它每
个样本以i.i.d.方式变化。此外,通信信道
假设每
个样本以i.i.d.方式变化,其中
。
B. 感知性能度量
感知性能可以通过各种度量来衡量,这些度量表征估计准确性或检测可靠性,即均方误差(MSE)、检测概率和Cramér-Rao界限(CRB)。这些度量(或它们的函数)可能源自参数及其估计值
之间的失真函数
,这在速率-失真理论的背景下[9]-[11]。对于估计问题,平方欧几里得距离
是一种常用的失真函数,它导出MSE度量。对于检测问题,
是一个随机二进制变量,表示目标是否存在。为此,可以选择失真为汉明距离,即
。平均失真则给出为
(2)
其中和
分别代表检测概率和虚警概率。根据Neyman-Pearson准则,当
固定时,最小化平均汉明失真
会产生最大
。正如我们稍后将展示的,这些失真度量与感知互信息(MI)密切相连。因此,我们将重点放在表征感知MI上,并揭示其与其他感知度量的联系。
对于模型中的感知,感知MI定义为
乍看之下,MI 不太可能被简化,这是由于
和
之间可能存在的非线性依赖关系,即
的非线性。幸运的是,以下引理提供了感知MI的一种更易处理的形式。
引理1. 和
之间的MI等于
和
之间的MI,即,
证明. 见附录A。 ■
C. 通信性能度量
通信性能可以通过遍历可达速率来衡量,表示为
其中表示在
条件下
和
之间的互信息(MI),
表示在某些约束下
的可行集,如功率和感知性能约束。
III. 主要结果
有了引理1,我们首先证明感知MI具有以下特性。
引理2. 是
的凹函数。
证明. 见附录B。 ■
根据引理2,我们可以将写成
的函数,即
。然后我们证明以下命题成立。
命题1. 假设平均发射功率为,即
。感知MI (3)在且仅在样本协方差矩阵
的支撑是以下确定性凸优化问题解的情况下最大化:
在这种情况下,具有确定性迹。特别地,如果问题(6)有唯一解,则
本身是确定性的,即
。
证明. 由于目标函数是的凹函数,证明是对[8,命题3]的直接修改,在此为简洁起见省略。 ■
然后我们证明以下定理为从恢复
的失真提供了一个普适界限。
定理1. (失真下界) 令为随机参数
的失真-速率函数,
为
的估计,
为衡量感知性能的相应失真函数。那么,从噪声观测
恢复
的平均失真下界为
其中等式对(b)成立,当且仅当满足命题1中的条件。特别地,如果(6)的解是唯一的,那么
本身应该是确定性的,以实现(b)。
证明. 见附录C。 ■
当感知最优样本协方差矩阵是唯一的,即当(6)有唯一解时,通信容量将因额外约束而减少,或等效地,ISAC信号中自由度的损失。定理2提供了在固定样本协方差矩阵下的高信噪比渐近通信容量。
定理2. (感知限制的高SNR遍历容量) 假设问题(6)有唯一解。在高SNR区域,即当
时,
可表示为
其中,且项
当时趋近于零,其中
是伽马函数。
证明. 见[8, 定理1]的证明。 ■
接下来我们讨论上述主要结果的含义。
IV. 讨论
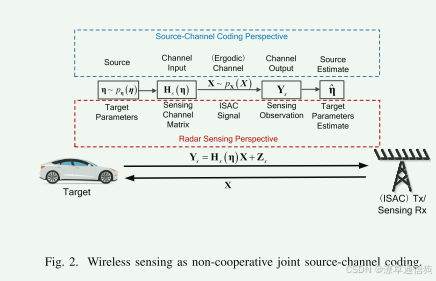
A. 无线感知作为非合作联合源-信道编码
众所周知,通信MI 具有明确的操作意义,即可达数据速率。然而,对于感知MI
,其操作意义尚不清楚,因为它似乎并不表示无线感知系统中任何"编码"速率。
第III节的主要结果提供了一个有趣的角度,从信息理论的观点来看待上述问题。也就是说,可以将无线感知视为一种非合作联合源-信道编码过程,其中目标编码参数的信息,并通过被动和非合作的方式将其传达给感知接收机。在这种情况下,随机参数
被视为无记忆源,
是信道输入,字母表的一个字母,感知接收机处的
是信道输出,从中可能揭示
的失真版本(即
)。速率-失真函数
表征在允许失真
的情况下,向感知接收机传达源
所需的最小比特数。
更有趣的是,ISAC信号用作传达源
的"信道矩阵"。特别地,由于我们将
建模为随机变量,它可以被视为感知接收机处具有信道状态信息(CSIR)的"遍历信道",意味着它每T个符号以i.i.d.方式变化,并且对感知接收机是完全已知的。相应地,感知MI
成为信道的"遍历速率",从这个意义上说,它限制了速率-失真函数
,从而为任何明确定义的失真函数的平均失真提供了下界。实际上,定理1的证明类似于遍历信道下源-信道分离定理的逆证明,其中
仅由目标(源
)的分布决定,最大感知MI仅依赖于统计模型(信道)
[12]。然而,证明这种界限的一般可达性是不太可能的。这是因为分离定理需要一种块式编码策略,将i.i.d.的
序列,即
,编码为信道码字
。在我们的情况下,作为非合作信息源的目标不具备这种块式"编码"能力。它能做的唯一事情是将每个源字母
映射到信道码字母
,这本质上是一种逐字编码策略,不具备任何最优性。
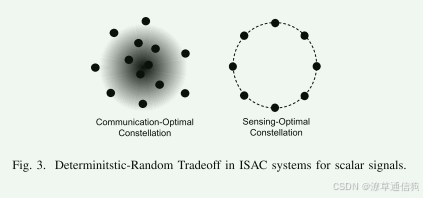
B. ISAC系统中的确定性-随机性权衡
自Shannon理论建立以来,学术界和工程实践都已充分证实,通信信号应该"尽可能随机"以传递信息。与此相反,感知(雷达)系统倾向于确定性信号以实现稳定的估计/检测性能。一个例子是,为了最大化目标回波的信噪比,雷达通常发射高功率恒模信号以克服非线性放大器失真,其中只允许信号相位变化。
从定理1得到的经验是,ISAC信号应该在一定程度上是确定性的,以达到最优感知MI(从而达到最优失真下界),这意味着样本协方差矩阵的支撑应限制在(6)的最优解集内,甚至本身就是确定性的。在这样的约束下,如定理2表明,由此产生的可达通信速率严格小于高斯容量,这是由于前对数自由度的损失。事实上,最近证明了高SNR容量(8)是通过Stiefel流形上的均匀分布实现的,这不再是高斯信号[7]。换句话说,ISAC系统以信号的随机性(从而降低通信性能)为代价来实现更好的感知性能,这被称为确定性-随机性权衡(DRT),即ISAC系统中的S&C功能性权衡[8]。
更值得注意的是,(7)中的下界不要求感知的特定失真函数,这意味着DRT适用于各种感知度量,包括MSE、检测概率和负感知MI本身。注意,证明中没有使用任何关于失真度量的分析表达式,这是对[8]中结果的泛化,后者依赖于CRB闭式表达式的凸性。尽管(7)的可达性条件仍未被探索,定理1为ISAC系统中DRT的一般正确性提供了有力证据。
V. 示例
在本节中,我们分析目标响应矩阵(TRM)估计的一个例子,其中。为了明确表征感知MI,我们还假设目标参数是零均值圆对称高斯分布,具有不可逆的统计协方差矩阵
,即
。这种模型已广泛应用于MIMO雷达系统的扩展目标估计。我们还将证明,在某些条件下,(7)中的下界是可达的。
A. 标量情况
我们首先考察标量情况,即M = 1, T = 1,其中S&C信号简化为
其中。感知MI由下式给出:
让我们将的估计表示为
。通过利用平方欧几里得距离失真,感知性能由MSE衡量。以下命题提供了MSE下界的可达性条件。
命题2. 标量情况下的感知MSE受以下约束:
当且仅当在感知接收机采用MMSE估计器,且,即
具有恒定幅度
时,等式成立。
证明. 见附录D。 ■
备注1: 当上述下界达到时,ISAC系统可能采用PSK调制来传递信息,如图3所示,导致可达通信速率严格低于高斯信号的通信速率。
备注2: 式(10)中的感知模型本质上是高斯源的非编码传输方案。对于非衰落信道,当失真为MSE时,非编码传输已知是最优的。然而,在ISAC系统中,
是一个已知于感知接收机的i.i.d.随机变量,这使得(10)本质上成为一个具有CSIR的遍历信道。在这种情况下,容量达到方案需要跨块编码,而这无法实现,因为目标是非合作的,如第IV节所讨论的。因此,非编码传输不再是最优的,导致(30)中的不等式(a)。当X的幅度固定为
时,遍历速率
被最大化并等于非衰落信道的遍历速率,这使得非编码传输再次变得最优。
B. 向量情况
注意到,我们将感知信号模型向量化为
感知MI可以表示为
其中是
的特征值分解,$K$是一个实交换矩阵,满足
,使得
。
令,且
,则(14)可重写为
命题3. 向量情况下的感知MSE受以下约束:
其中是独立复高斯向量
的失真-速率函数。当以下条件成立时,上述下界可以达到:
- 在感知接收机采用MMSE估计器。
- 样本协方差矩阵
是确定性的,即
。
- 和
可由某个酉矩阵
对角化,即:
特别地,应具有以下注水结构:
其中的选择使得
。
证明. 见附录E。 ■
备注3: 从命题3再次注意到,如果MSE下界由唯一的感知最优协方差矩阵达到,通信速率将会降低,因为
需要是确定性的。在这种情况下,ISAC波形
不再是高斯的,其唯一的随机性(自由度)存在于其右奇异向量中,导致定理2中的高SNR容量。
VI. 结论
在本文中,我们从速率-失真的角度研究了ISAC系统的基本限制。我们考虑了一个通用的向量高斯ISAC信道模型,并分别采用条件互信息作为S&C的性能度量。我们的主要结果表明,感知MI为任何明确定义的感知失真度量提供了一个普适的下界,且当ISAC信号的样本协方差矩阵是确定性的时,失真下界最小化。在这种情况下,由于ISAC信号中随机性的减少,可达通信速率降低,导致S&C之间的DRT(确定性-随机性权衡)。我们还通过指出无线感知与联合源-信道编码之间的类比来解释主要结果。也就是说,感知操作可以被视为目标作为一个非合作信息源,以被动方式编码并向感知接收机传达其参数信息。最后,我们研究了ISAC系统中目标响应矩阵估计的具体例子,并提供了实现失真下界的充分条件。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











