






 该博客介绍了如何使用STM32CubeMX配置中断模式控制LED灯及串口通信。通过设置GPIO中断,实现PB5引脚状态变化时控制LED_A4的亮灭。同时,利用USART1实现中断方式的串口通信,根据接收到的字符指令控制信息发送的启停。在Keil中完成代码编译和烧录后,展示了成功运行的效果。
该博客介绍了如何使用STM32CubeMX配置中断模式控制LED灯及串口通信。通过设置GPIO中断,实现PB5引脚状态变化时控制LED_A4的亮灭。同时,利用USART1实现中断方式的串口通信,根据接收到的字符指令控制信息发送的启停。在Keil中完成代码编译和烧录后,展示了成功运行的效果。
一、中断模式控制led灯
1、STM32CubeMX配置项目
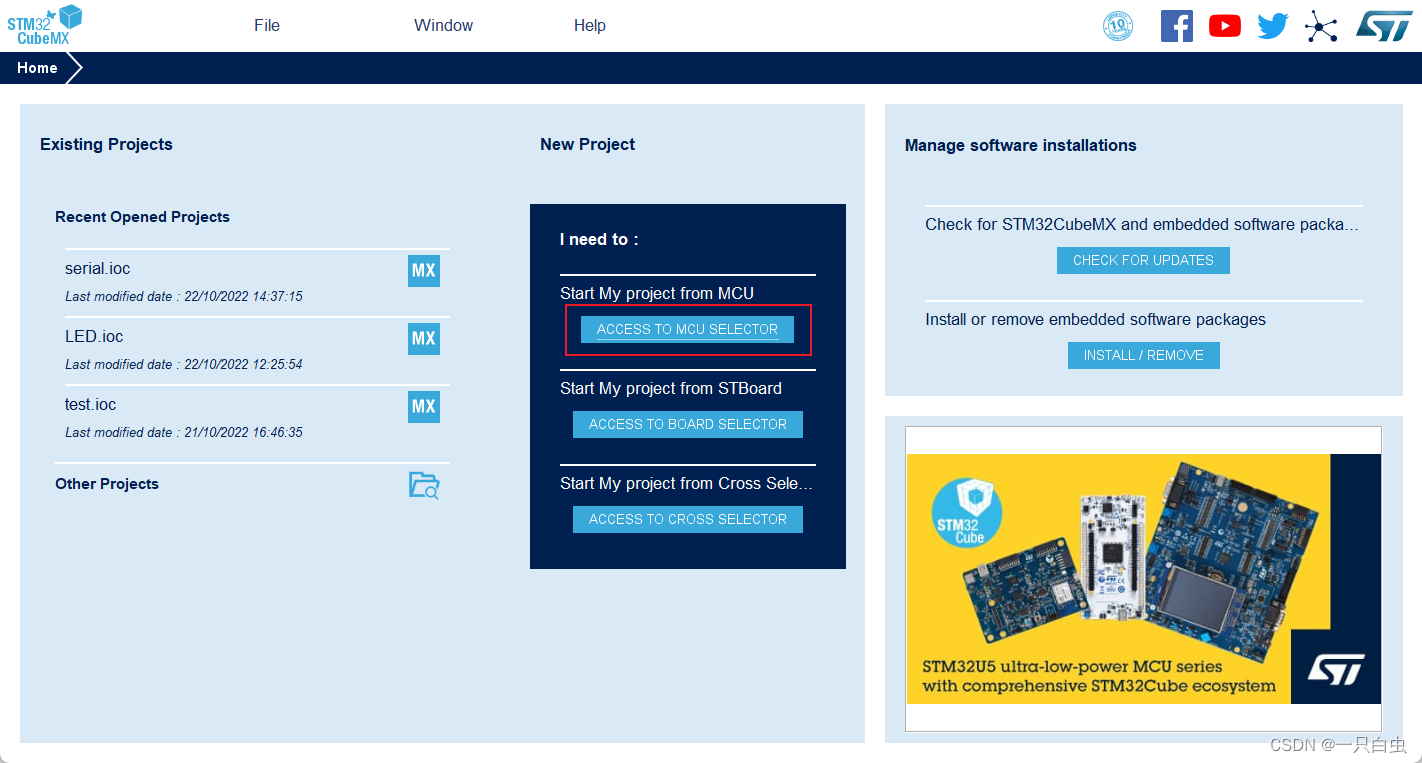
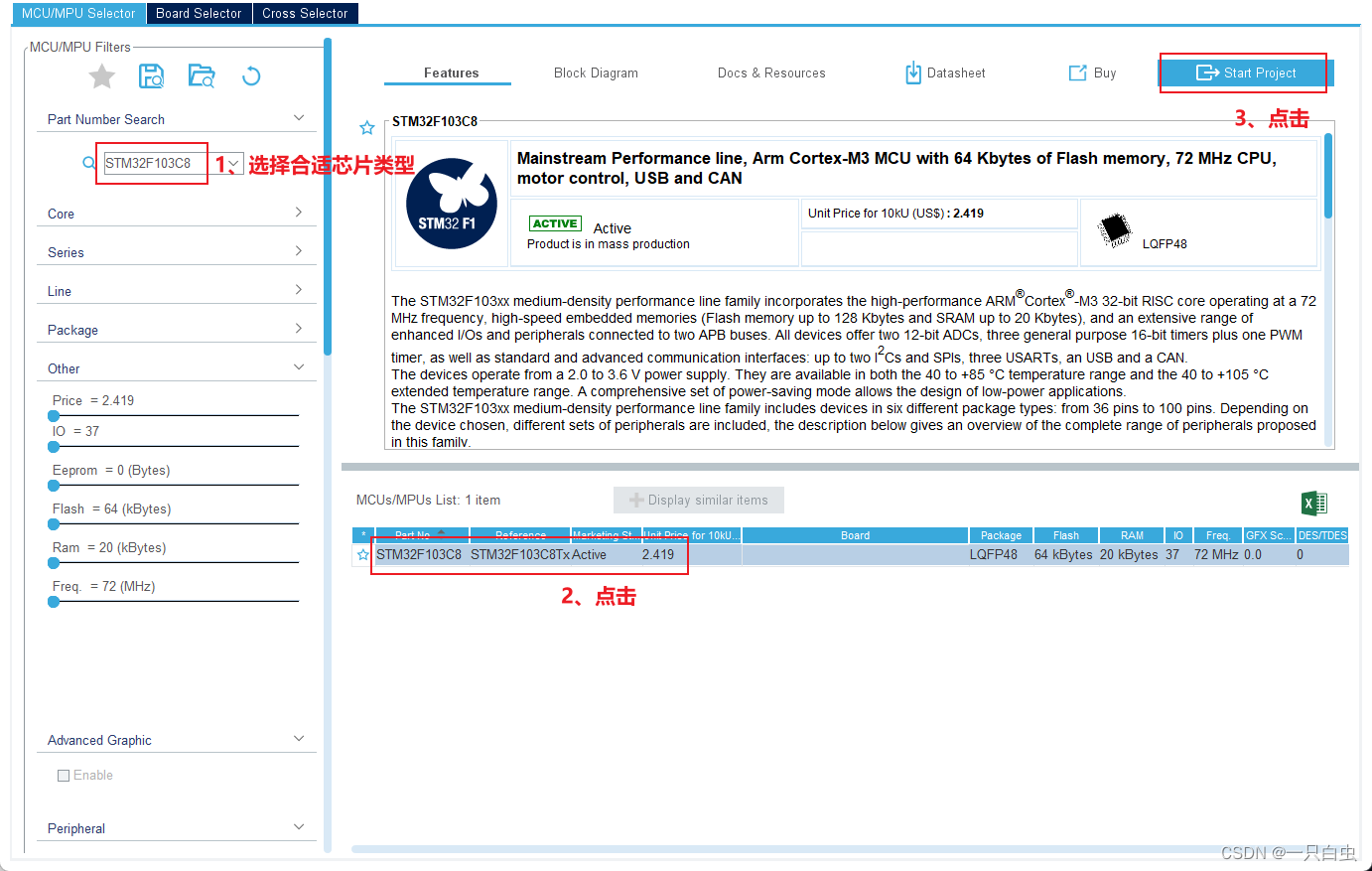
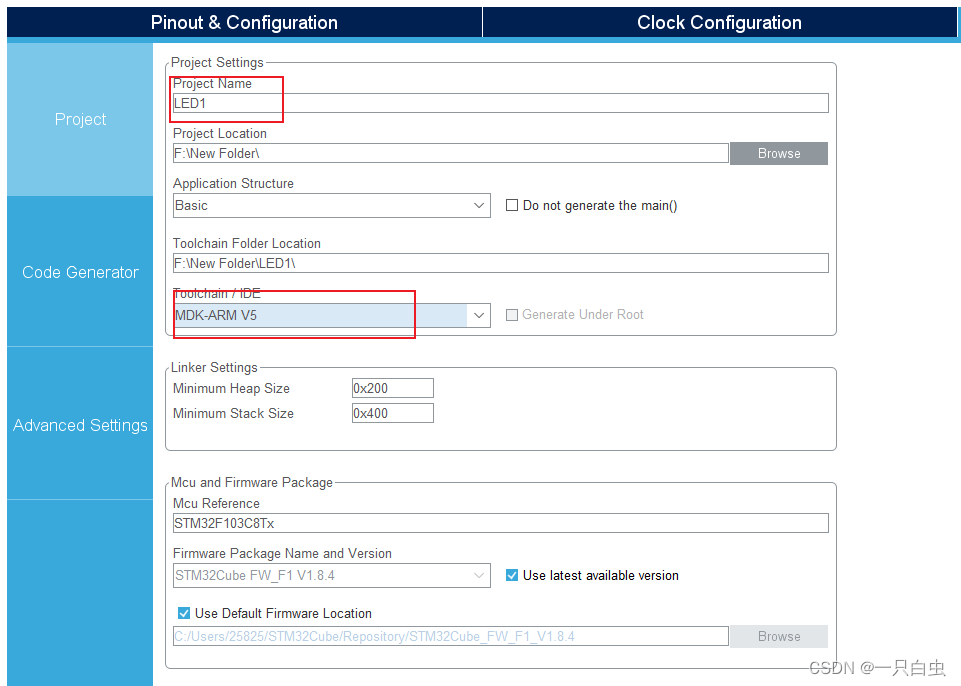
创建项目
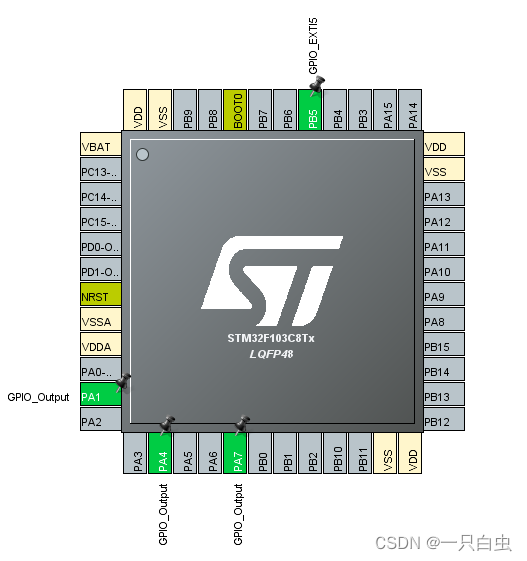
引脚设置
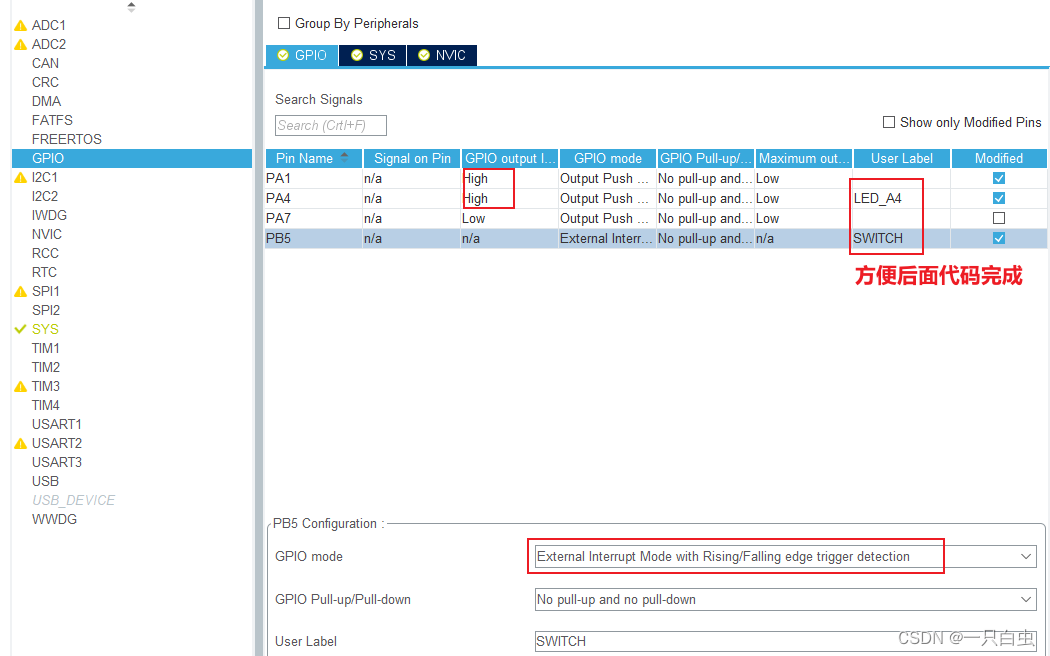
PA1、PA4、PA7设置为GPIO_Output,PB5设置为GPIO_EXTI5
如同所示
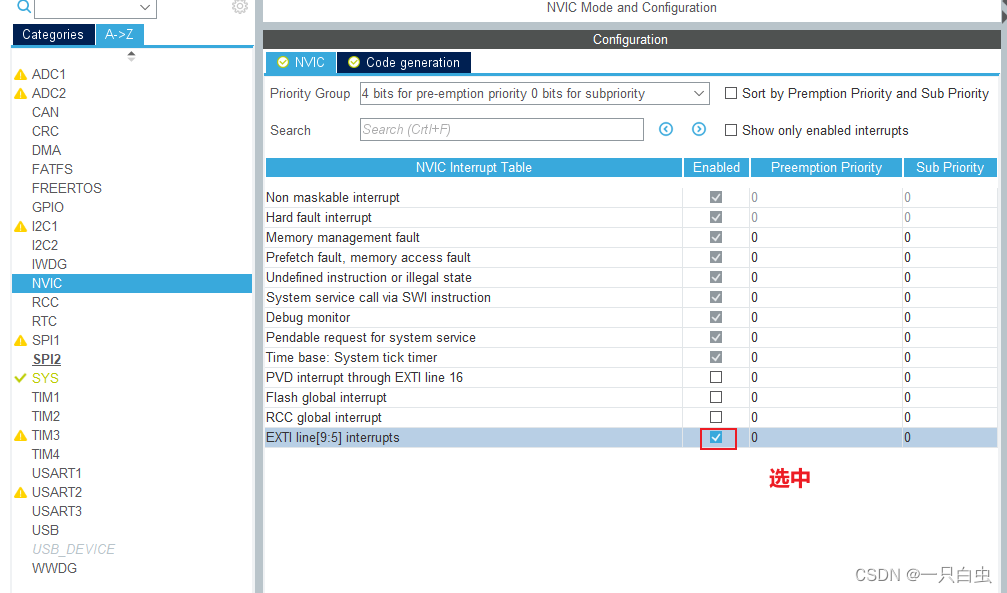
NVIC设置
SYS设置
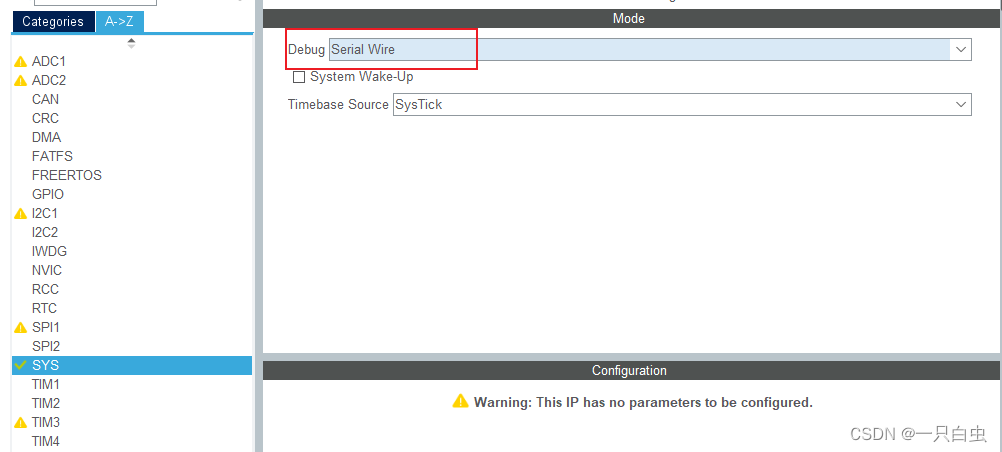
GPIO设置
PA1、PA4设置为高电平 PB5中断配置设置为上升沿和下降沿都触发
如图所示
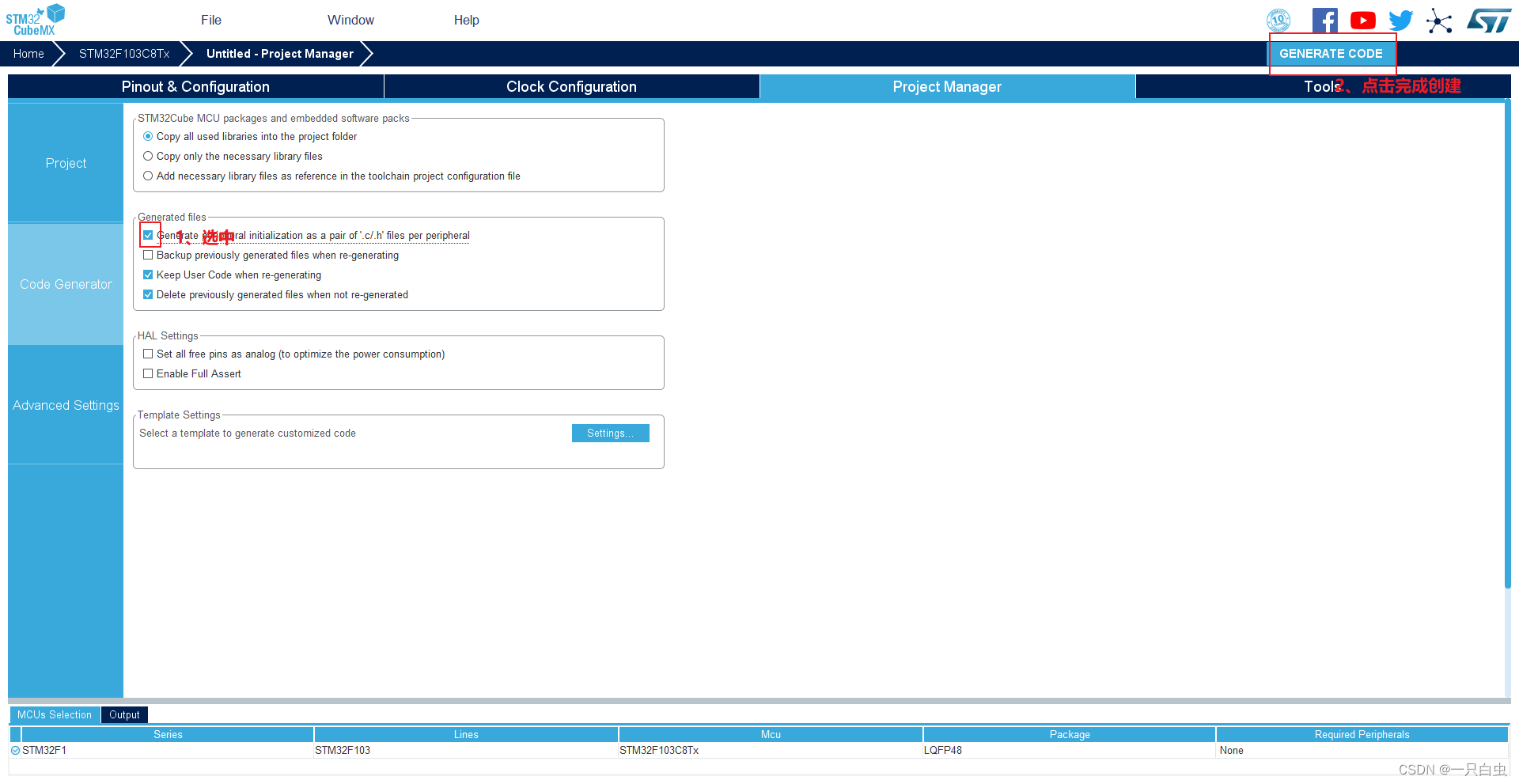
完成项目创建
2、keil完成项目汇编
STM32CubeMX完成项目创建后点击Open Project进入keil
代码添加
将代码添加到stm32f1xx_hal_msp.c文件中
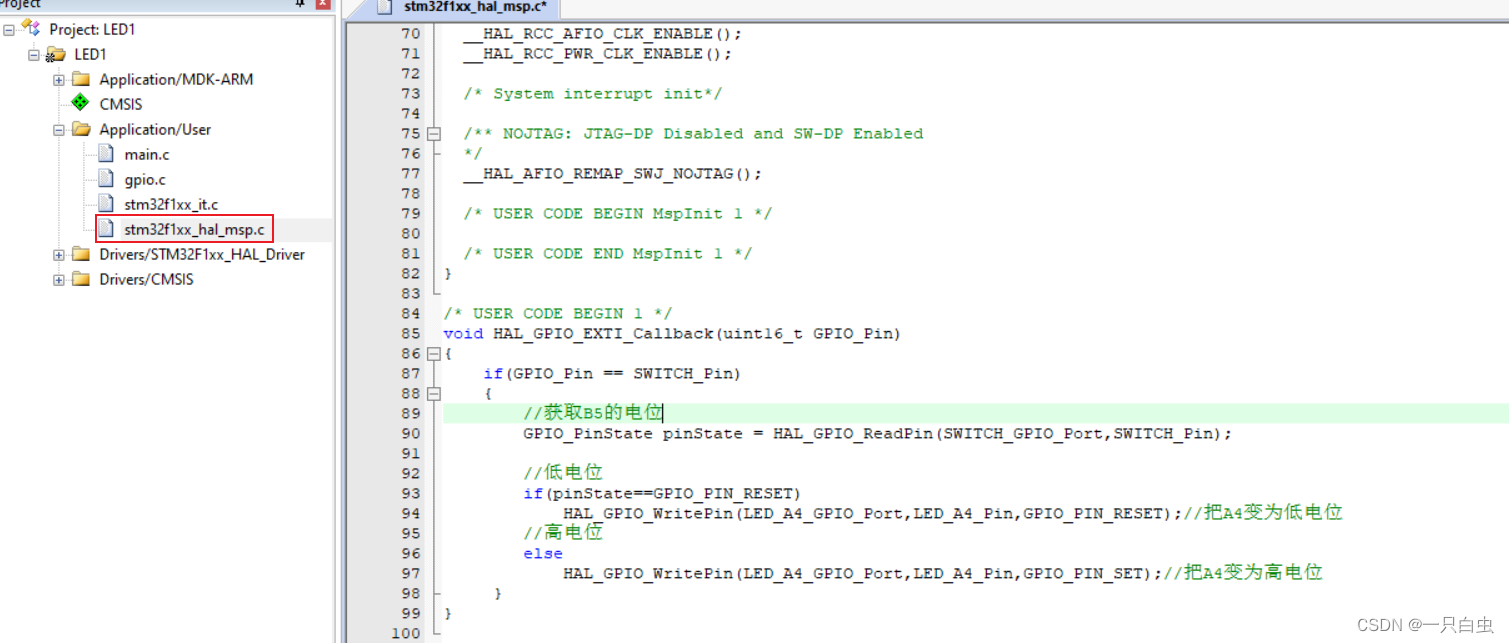
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == SWITCH_Pin)
{
//获取B5的电位
GPIO_PinState pinState = HAL_GPIO_ReadPin(SWITCH_GPIO_Port,SWITCH_Pin);
//低电位
if(pinState==GPIO_PIN_RESET)
HAL_GPIO_WritePin(LED_A4_GPIO_Port,LED_A4_Pin,GPIO_PIN_RESET);//把A4变为低电位
//高电位
else
HAL_GPIO_WritePin(LED_A4_GPIO_Port,LED_A4_Pin,GPIO_PIN_SET);//把A4变为高电位
}
}
编译
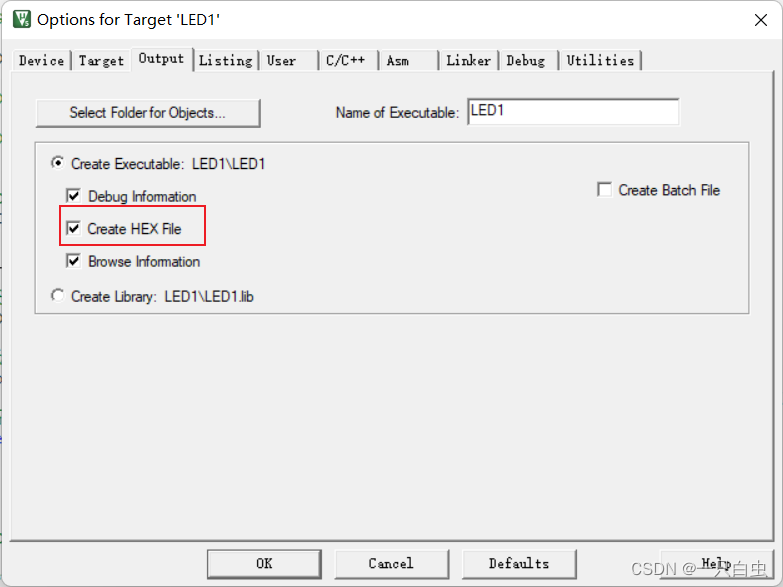
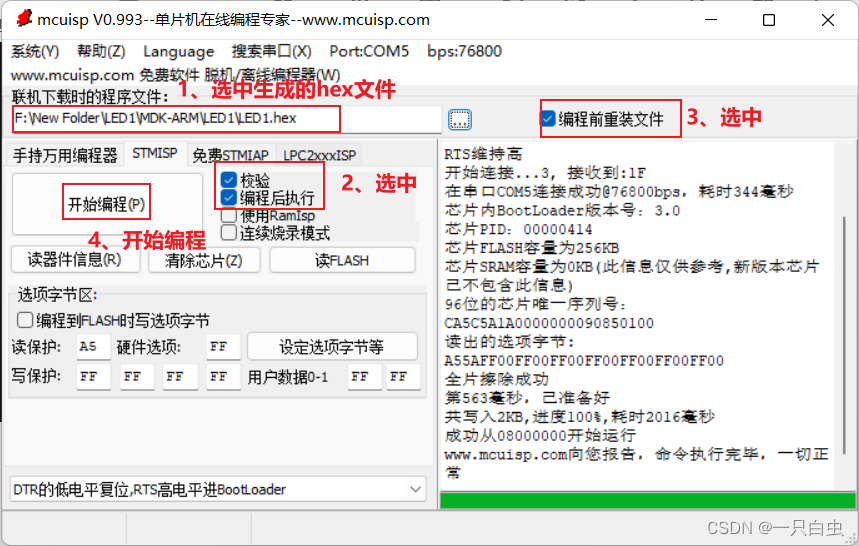
在编译前设置自动生成hex文件
点击编译按钮开始编译
编译成功

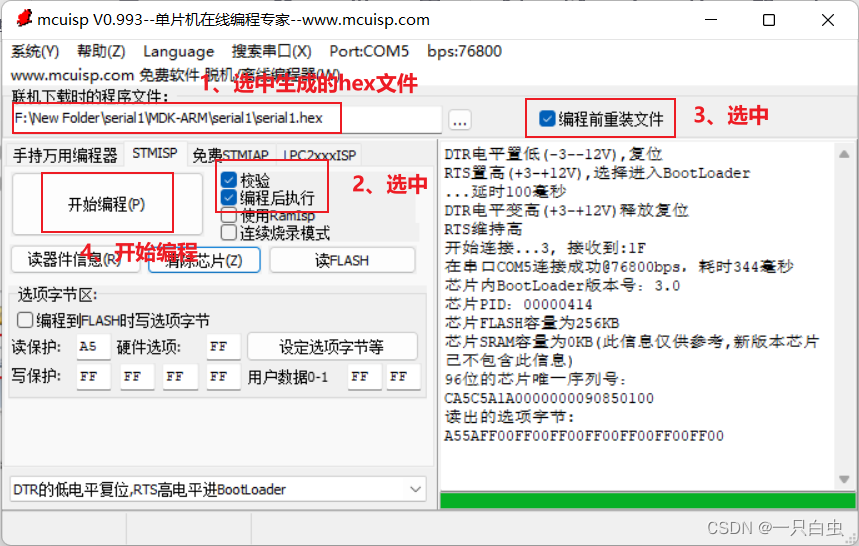
3、烧录
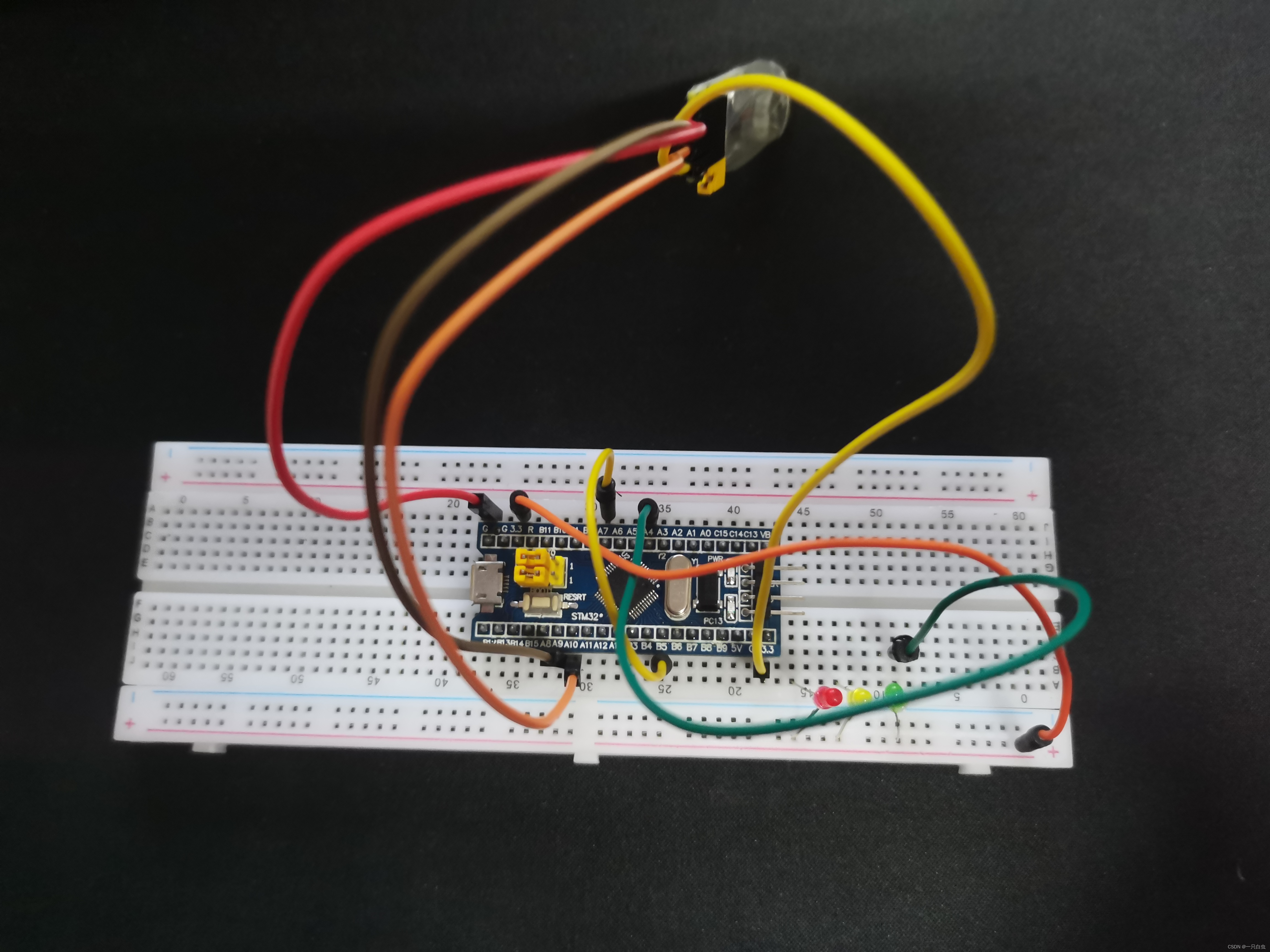
接线
USB转TLL与开发板接线
3v3——3.3v
TXD——A10
RXD——A9
GND——G
开发板接线
A4——二极管负极
3.3——二极管正极
B5——A7(模拟开关开)
B5——A1(模拟开关关)接线效果图
烧录
4、效果
二、串口通信(中断方式)
1、STM32CubeMX配置项目
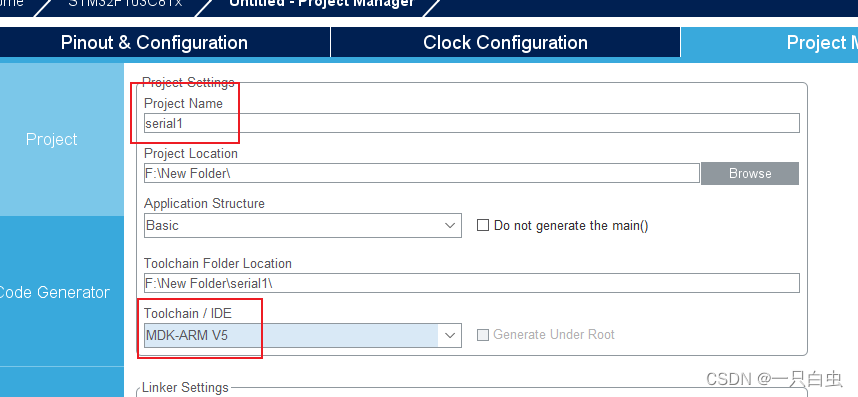
在STM32CubeMX创建新项目
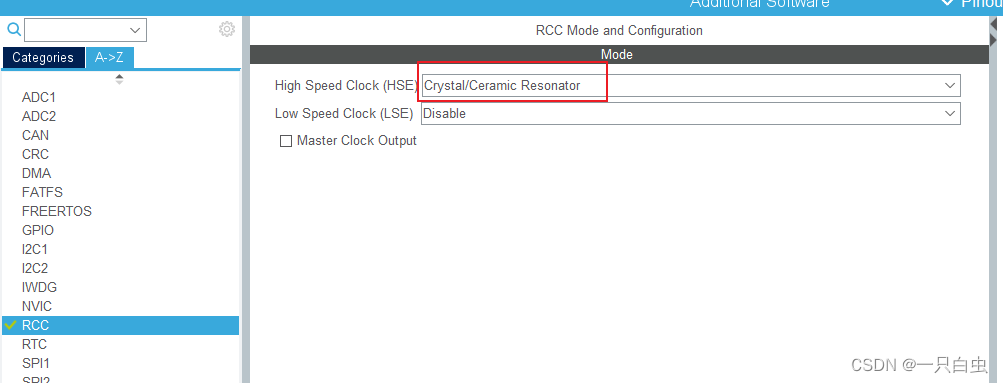
RCC设置
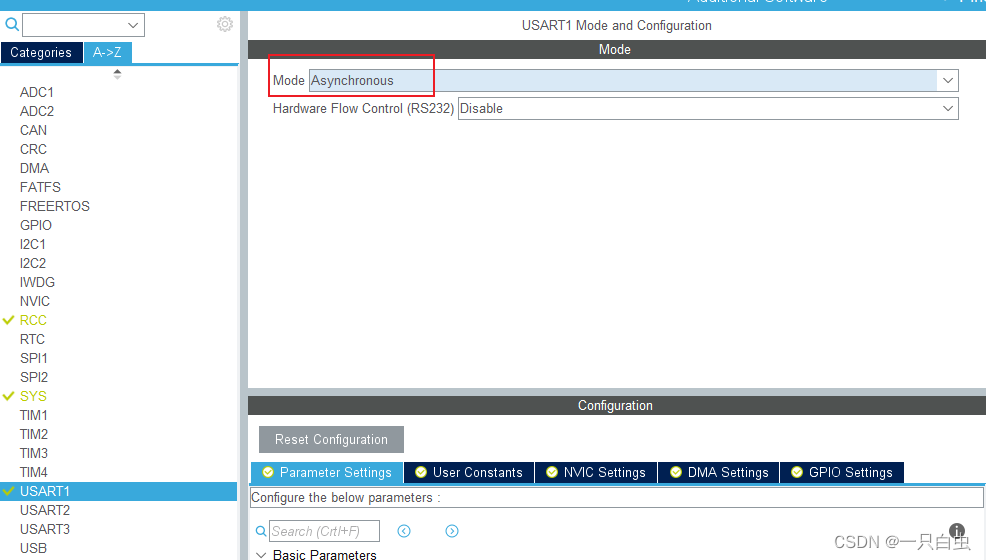
USART1 设置
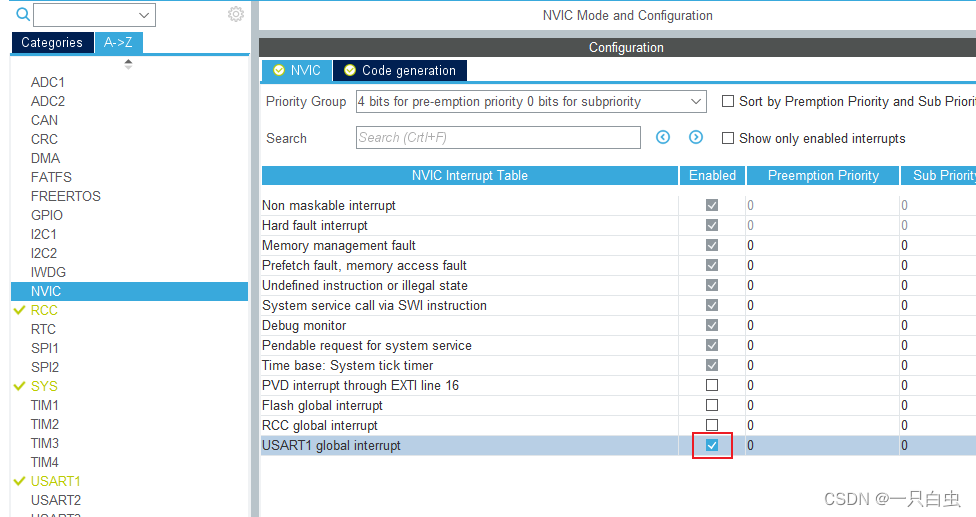
NVIC设置
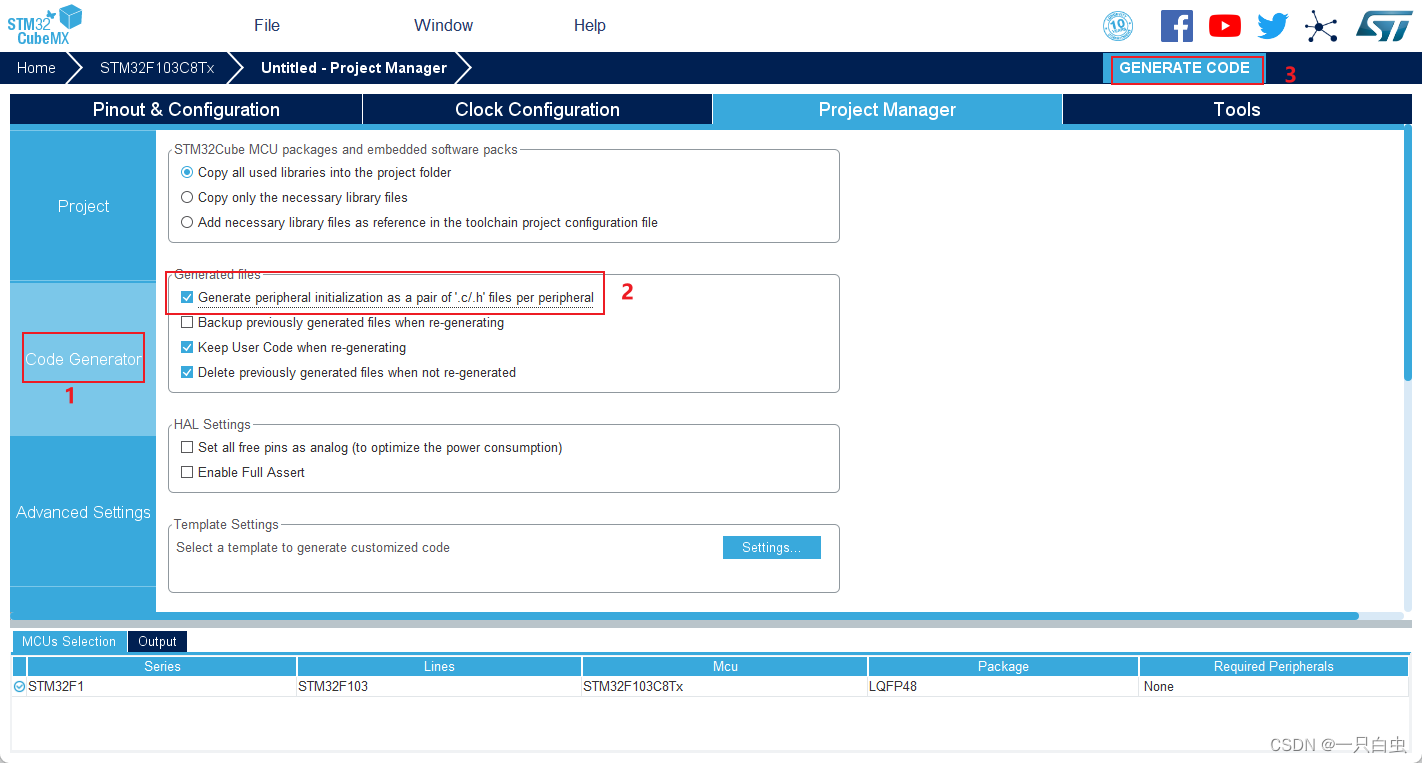
完成项目创建
2、keil完成项目汇编
代码添加
mian函数代码
#include "main.h"
#include "usart.h"
#include "gpio.h"
#include <string.h>
void SystemClock_Config(void);
char c;//指令 s:停止 t:开始
char message[]="hello Windows\n";//输出信息
char tips[]="CommandError\n";//提示1
char tips1[]="Start.....\n";//提示2
char tips2[]="Stop......\n";//提示3
int flag=1;//标志 0:停止发送 1.开始发送
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
//设置接受中断
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
//当flag为1时,每秒发送一次信息
//当flag为0时,停止
while (1)
{
if(flag==1){
//发送信息
HAL_UART_Transmit(&huart1, (uint8_t *)&message, strlen(message),0xFFFF);
//延时
HAL_Delay(1000);
}
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//当输入的指令为0时,发送提示并改变flag
if(c=='s'){
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips2, strlen(tips2),0xFFFF);
}
//当输入的指令为1时,发送提示并改变flag
else if(c=='t'){
flag=1;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips1, strlen(tips1),0xFFFF);
}
//当输入不存在指令时,发送提示并改变flag
else {
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips, strlen(tips),0xFFFF);
}
//重新设置中断
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
}
/* USER CODE END 4 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
编译
编译成功

3、烧录
4、效果


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









