



连接准备:livox连接两根线,
一根供电线,插上后摸雷达表面,会发热;
一根网线,连接到orin
我们的工作空间里需要有安装两部分:livox_ros_driver2和Livox_SDK,两个文件夹在src中并列
按照 https://github.com/Livox-SDK/livox_ros_driver2 安装即可
最后运行ros2 launch livox_ros_driver2 rviz_MID360_launch.py的时候,如果有报错,可能是雷达没配好IP,或是网口没接对,请仔细检查网口连接情况。
若是雷达配置IP,需修改两个位置:
1. your_ws\src\livox_ros_driver2\config\MID360_config
2. your_ws\install\livox_ros_driver2\share\livox_ros_driver2\config\MID360_config
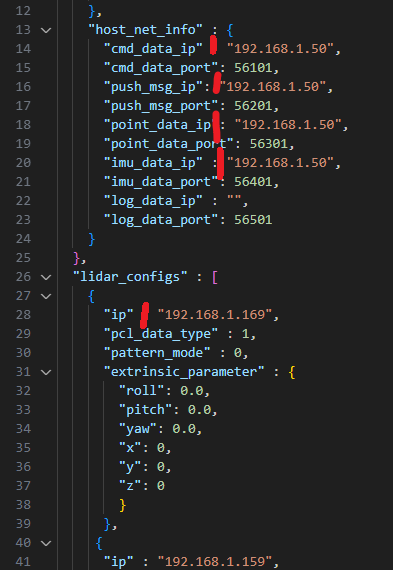
分别修改图中的五处:
前四个,是网口的IP,用ifconfig查看其(如eth0)IP。
第五个,是雷达IP,我是在启动ros2 launch livox_ros_driver2 rviz_MID360_launch.py的时候报错信息里找到的。
改好后应当可以在rviz中正常看到点云。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









