







编译环境:Dev-C++
分支界限法解旅行售货员问题的具体算法实现
旅行售货员问题描述:
某售货员要到若干城市去推销商品,已知各城市之间的路程(或旅费)。他要选定一条从驻地出发,经过每个城市一次,最后回到驻地的路线,使总的路程(或总旅费)最小。
算法描述:
路线是一个带权图。图中各边的费用(权)为正数。图的一条周游路线是包括V中的每个顶点在内的一条回路。周游路线的费用是这条路线上所有边的费用之和。 旅行售货员问题的解空间可以组织成一棵排列树,从树的根结点到任一叶结点的路径定义了图的一条周游路线。旅行售货员问题要在图G中找出费用最小的周游路线。
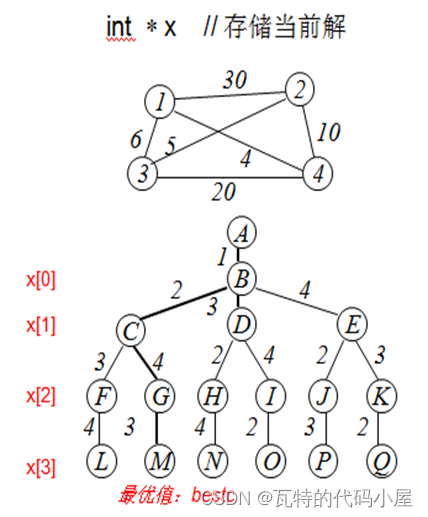
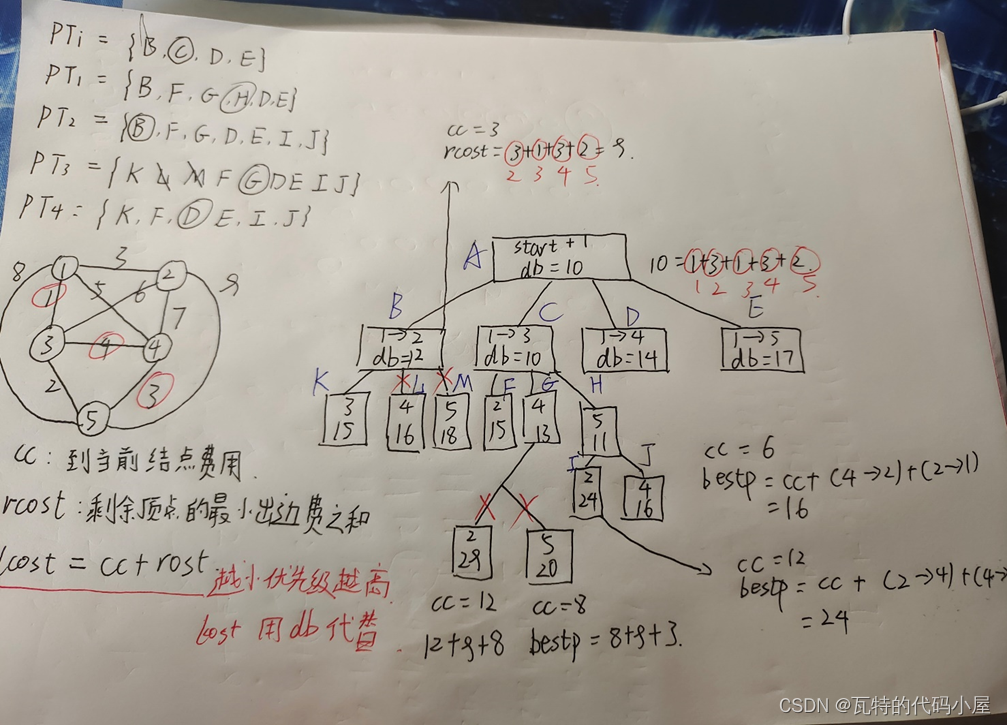
解旅行售货员问题的优先队列式分支限界法用优先队列存储活结点表。活结点m在优先队列中的优先级定义为: 活结点m对应的子树费用下界lcost,lcost=cc+rcost,其中,cc为当前结点费用,rcost为当前顶点最小出边费用加上剩余所有顶点的最小出边费用和。
创建一个最小堆,用于表示活结点优先队列。堆中每个结点的优先级是子树费用的下界lcost值。计算每个顶点i的最小出边费用并用minout[i]记录。如果所给的有向图中某个顶点没有出边,则该图不可能有回路,算法结束。基于优先队列式分支限界的旅行售货员问题求解算法,采用限界函数lcost ,作为优先级,不断调整搜索方向,选择最有可能取得最优解的子树优先搜索;同时,根据限界函数lcost进行剪枝,剪掉不包含最优解的分。
算法步骤:
①状态A表示售货员没有经过任何路径。此时cc 和 rcost 都为0。以此为初始状态,加入优先队列(最小堆)。
②之后取出堆顶,此活节点成为扩展节点,扩展出多个儿子节点。检测所有儿子节点的lcost值,lcost = cc+rcost,其含义为至少需要花费lcost的费用,所以比较lcost和bestc的值。
③若lcost > bestc,则它所在的子树再也不会小于bestc,剪枝。
④若lcost < bestc,则说明它的子树有可能会得到最优解,因此此儿子节点进入优先队列。
⑤每次搜索到叶节点,更新bestc,bestc = cc + a[n-2][n-1]+a[n-1][1]。
所有状态都被访问或者剪枝后,返回。
调试过程及实验结果
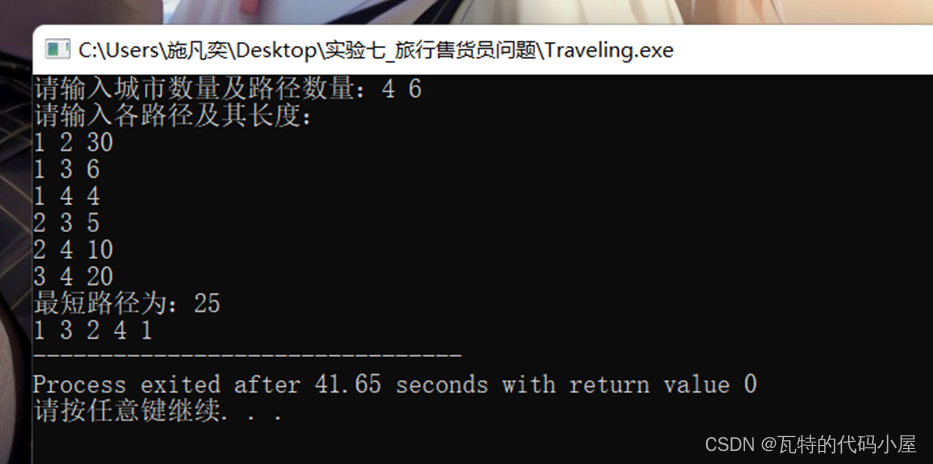
程序执行的结果:
源代码:
#include<cstdio>
#include <cstring>
#include <queue>//队列
#define MAX 100
#define NoEdge -1
using namespace std;
int n;
int arr[MAX][MAX];
int v[MAX];
int bestc;
int num = 0;
class MinHeapNode{
public: char name;
public: int rcost,lcost;
public: int cc,s;
public: int* x;
MinHeapNode(){
num++;
}
bool operator<(const MinHeapNode& MH) const{
return lcost > MH.lcost;
}
};
int BBTSP(){
MinHeapNode E;
int cc, rcost, MinSum, * MinOut, b;
int i, j;
MinSum = 0;
MinOut = new int[n + 1];
for (i = 1; i <= n; i++)
{
MinOut[i] = NoEdge;
for (j = 1; j <= n; j++)
if (arr[i][j] != NoEdge && (arr[i][j] < MinOut[i] || MinOut[i] == NoEdge))
MinOut[i] = arr[i][j];
if (MinOut[i] == NoEdge)
return NoEdge;
MinSum += MinOut[i];
}
priority_queue<MinHeapNode> prioque;
E.s = 0;
E.cc = 0;
E.rcost = MinSum;
E.x = new int[n];
for (i = 0; i < n; i++)
E.x[i] = i + 1;
bestc = NoEdge;
//搜索排列空间树
while (E.s < n - 1){//非叶节点
if (E.s == n - 2){// 当前扩展节点是叶节点的父节点
if (arr[E.x[n - 2]][E.x[n - 1]] != NoEdge && arr[E.x[n - 1]][1] != NoEdge &&
(E.cc + arr[E.x[n - 2]][E.x[n - 1]] + arr[E.x[n - 1]][1] < bestc || bestc == NoEdge)){
//费用更小的回路
bestc = E.cc + arr[E.x[n - 2]][E.x[n - 1]] + arr[E.x[n - 1]][1];
E.cc = bestc;
E.lcost = bestc;
E.s++;
prioque.push(E);
}else{
delete[] E.x; // 舍弃扩展结点
}
}
else {// 产生当前扩展节点儿子节点
for (i = E.s + 1; i < n; i++){
MinHeapNode N;
if (arr[E.x[E.s]][E.x[i]] != NoEdge){// E.x[E.s] 是当前要扩展的父节点,E.x[i] 是被遍历的子节点
cc = E.cc + arr[E.x[E.s]][E.x[i]]; // 可行儿子节点
rcost = E.rcost - MinOut[E.x[E.s]];
b = cc + rcost; // 下界
if (b < bestc || bestc == NoEdge) // 子树可能含最优解,节点插入最小堆
{
N.s = E.s + 1; // 进入下一层
N.cc = cc;
N.lcost = b;
N.rcost = rcost;
N.x = new int[n];
for (j = 0; j < n; j++)
N.x[j] = E.x[j];
N.x[E.s + 1] = E.x[i];
N.x[i] = E.x[E.s + 1];
prioque.push(N); // 加入优先队列
}
}
}
delete[] E.x;
}
if (prioque.empty())
break;
E = prioque.top();
prioque.pop();
}
if (bestc == NoEdge)
return NoEdge;
for (i = 0; i < n; i++)
v[i + 1] = E.x[i];
while (prioque.size()){
E = prioque.top();
prioque.pop();
delete[] E.x;
}
return bestc;
}
int main(){
printf("请输入城市数量及路径数量:");
scanf("%d",&n);
int k;
memset(arr, NoEdge, sizeof(arr));
scanf("%d",&k);
printf("请输入各路径及其长度:");
int p, q, len;
for (int i = 1; i <= k; ++i){
scanf("%d %d %d",&p,&q,&len);
arr[p][q] = len;
arr[q][p] = len;
}
int res = BBTSP();
if (res == NoEdge){
puts("无法形成回路");
}else {
printf("最短路径为:%d\n",res);
for (int i = 1; i <= n; i++)
printf("%d ",v[i]);
printf("%d",v[1]);
}
}



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











