






代码一:
#create grid
grid=[[0,0,1,0,0,0],
[0,0,1,0,0,0],
[0,0,0,0,1,0],
[0,0,1,1,1,0],
[0,0,0,0,1,0]]
init = [0, 0]
goal = [len(grid)-1,len(grid[0])-1]
#up left down right
dir = [[0, -1],
[-1, 0],
[0, 1],
[1, 0]]
gird_row=len(grid)
gird_col=len(grid[0])
def search(gird, init, goal):
if init == goal:
return [0, init[0], init[1]]
#未扩展的标记0,已经扩展的标记1
expanded_grid=[[0,0,0,0,0,0],
[0,0,0,0,0,0],
[0,0,0,0,0,0],
[0,0,0,0,0,0],
[0,0,0,0,0,0]]
#初始节点标记
expanded_grid[init[0]][init[1]] = 2
# expanded node
open_list = [[0,init[0],init[1]]]
# cost,list of(x,y)
path = []
cost = 1
#loop
while open_list != []:
g = open_list[0][0]
x = open_list[0][1]
y = open_list[0][2]
#弹出最小的g
path.append(open_list[0])
del open_list[0]
if x != goal[0] or y != goal[1]:
for i in dir:
x2 = x+i[0]
y2 = y+i[1]
# 移动的时候越界判断&障碍物判断&已经扩展过的判断
if (x2 <= gird_row-1) and (x2 >= 0) and (y2 <= gird_col-1) and (y2 >= 0) and (gird[x2][y2] == 0) and (expanded_grid[x2][y2] == 0):
g2 = g+cost
open_list.append([g2, x2, y2])
expanded_grid[x2][y2] = 2
#将g按从小到大的顺序排列
open_list.sort()
elif open_list == []:
return path
else:
pass
# print("There is no vaild path!")
return path
path=(search(grid,init,goal))
for i in path:
print(i)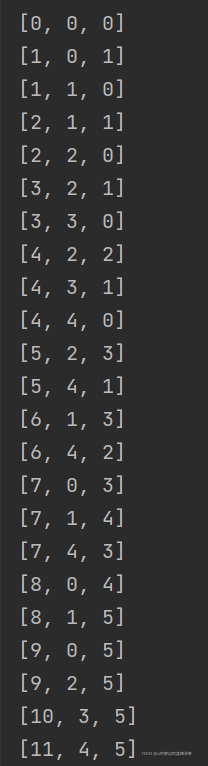
代码二:
#create grid
grid=[[0,0,1,0,0,0],
[0,0,1,0,0,0],
[0,0,1,0,0,0],
[0,0,1,0,0,0],
[0,0,0,0,0,0]]
init = [0, 0]
goal = [len(grid)-1,len(grid[0])-1]
#up left down right
dir = [[0, -1],
[-1, 0],
[0, 1],
[1, 0]]
gird_row=len(grid)
gird_col=len(grid[0])
def search(gird, init, goal):
step = 1
if init == goal:
return 0
#未扩展的标记0,已经扩展的标记1
expanded_grid=[[0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0]]
for row in range(len(grid)):
for col in range(len(grid[0])):
if grid[row][col]==1:
expanded_grid[row][col]='x'
#初始节点标记
expanded_grid[init[0]][init[1]] = 1
# expanded node
open_list = [[0,init[0],init[1]]]
# cost,list of(x,y)
path = []
cost = 1
#loop
while open_list != []:
g = open_list[0][0]
x = open_list[0][1]
y = open_list[0][2]
#弹出最小得g
path.append(open_list[0])
del open_list[0]
if x != goal[0] or y != goal[1]:
for i in dir:
x2 = x+i[0]
y2 = y+i[1]
# 移动的时候越界判断&障碍物判断&已经扩展过的判断
if (x2 <= gird_row-1) and (x2 >= 0) and (y2 <= gird_col-1) and (y2 >= 0) and (gird[x2][y2] == 0) and (expanded_grid[x2][y2] == 0):
g2 = g+cost
open_list.append([g2, x2, y2])
step += 1
expanded_grid[x2][y2] = step
#将g按从小到大得顺序排列
open_list.sort()
elif open_list == []:
return expanded_grid
else:
pass
# print("There is no vaild path!")
return expanded_grid
expanded=(search(grid,init,goal))
for i in expanded:
print(i)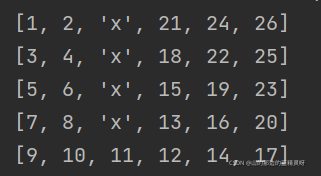
代码三:
#create grid
grid=[[0,0,0,0,0,0],
[0,1,1,1,1,0],
[0,0,1,0,0,0],
[0,0,1,1,0,1],
[0,0,0,0,0,0]]
init = [0, 0]
goal = [len(grid)-1,len(grid[0])-1]
#up left down right
dir = [[0, -1],
[-1, 0],
[0, 1],
[1, 0]]
dir_pic=['<','^','>','v']
gird_row=len(grid)
gird_col=len(grid[0])
def search(gird, init, goal):
if init == goal:
return [0, init[0], init[1]]
#未扩展的标记0,已经扩展的标记1
expanded_grid=[[0,0,0,0,0,0],
[0,0,0,0,0,0],
[0,0,0,0,0,0],
[0,0,0,0,0,0],
[0,0,0,0,0,0]]
#标记动作的地图
action_grid = [[-1, -1, -1, -1, -1, -1],
[-1, -1, -1, -1, -1, -1],
[-1, -1, -1, -1, -1, -1],
[-1, -1, -1, -1, -1, -1],
[-1, -1, -1, -1, -1, -1]]
#初始节点标记
expanded_grid[init[0]][init[1]] = 2
# expanded node
open_list = [[0,init[0],init[1]]]
# cost,list of(x,y)
path = []
cost = 1
#loop
while open_list != []:
g = open_list[0][0]
x = open_list[0][1]
y = open_list[0][2]
#弹出最小得g
path.append(open_list[0])
del open_list[0]
if x != goal[0] or y != goal[1]:
for i in range(len(dir)):
x2 = x+dir[i][0]
y2 = y+dir[i][1]
# 移动的时候越界判断&障碍物判断&已经扩展过的判断
if (x2 <= gird_row-1) and (x2 >= 0) and (y2 <= gird_col-1) and (y2 >= 0) and (gird[x2][y2] == 0) and (expanded_grid[x2][y2] == 0):
g2 = g+cost
open_list.append([g2, x2, y2])
expanded_grid[x2][y2] = 2
action_grid[x2][y2]=i
#将g按从小到大得顺序排列
open_list.sort()
elif open_list == []:
return action_grid
# print("There is no vaild path!")
return action_grid
def print_path():
action_res = (search(grid, init, goal))
policy = [[' ' for col in range(len(grid[0]))] for row in range(len(grid))]
x = goal[0]
y = goal[1]
policy[x][y] = '*'
while x!=init[0] or y!=init[1]:
x2=x-dir[action_res[x][y]][0]
y2=y-dir[action_res[x][y]][1]
policy[x2][y2]=dir_pic[action_res[x][y]]
x=x2
y=y2
return policy
#test
policy=print_path()
for i in range(len(policy)):
print(policy[i])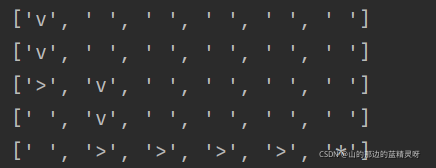


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









