







 超级会员免费看
超级会员免费看
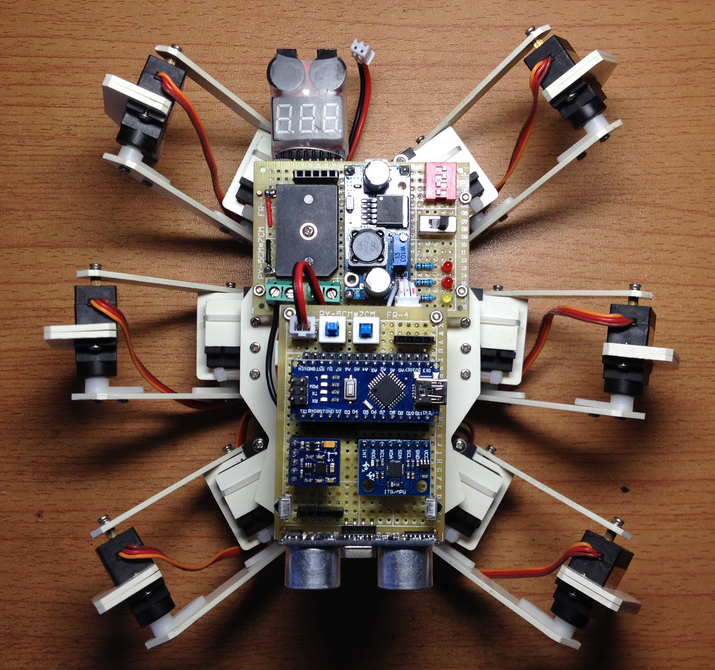
 本文讲述了作者从大一到大四,如何通过自学嵌入式开发知识,最终成功制作出六足仿生机器人的全过程。机器人采用Arduino Nano作为核心控制器,24路舵机控制板进行关节控制,具备红外遥控和超声波避障功能。制作过程分为机械和电子两部分,详细介绍了腿部关节的制作与电子部分的电源管理和控制单元。项目开源,提供代码参考。
本文讲述了作者从大一到大四,如何通过自学嵌入式开发知识,最终成功制作出六足仿生机器人的全过程。机器人采用Arduino Nano作为核心控制器,24路舵机控制板进行关节控制,具备红外遥控和超声波避障功能。制作过程分为机械和电子两部分,详细介绍了腿部关节的制作与电子部分的电源管理和控制单元。项目开源,提供代码参考。
摘要:经过大一那次失败之后,我决定暂时停止该项目的开发,转而先去学习那些有关嵌入式开发的基础知识,等以后有能力的时候再去独立完成这个六足机器人。很幸运的是在我大学本科即将结束的时候,我已掌握了足够的知识来完成那个曾经困扰我已久的机器人项目,于是我花了几周的时间完成了这个六足机器人,算是了却了自己的一个心愿吧。
一、前言
这个六足机器人是我在大四做的,是我大学本科生涯的最后一个个人项目。至于为什么我要做六足机器人,还要从高考完之后说起:当时刚考完的我一直想做一些有意思的事情,直到有一天我发现了一个叫PVCBOT的网站,里面记录了很多如何使用PVC材料来制作简单机器人的教程,其中有一款叫做PVC六足机器昆虫的机器人彻底震撼了我,当时看完教程之后我就下定决心也要做一个类似的六足机器人,于是我便从懒猫侠前辈那里购买了六足机器人套件(目前应该已经绝版了),并打算按照提供的教程完成自己的六足机器人,但无奈当时的我所掌握的知识太少,什么单片机、串口通信、舵机PWM、电源管理、传感器、舵机控制板等都不懂,特别是机械结构方面我更是一窍不

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











