






 本文介绍了如何使用UDP协议控制机械臂,包括发送16进制指令以及机械臂控制指令的结构,如W、S、A、D分别对应红蓝臂的角度增减。还提到服务器端口号和IP设置以及初始化步骤。
本文介绍了如何使用UDP协议控制机械臂,包括发送16进制指令以及机械臂控制指令的结构,如W、S、A、D分别对应红蓝臂的角度增减。还提到服务器端口号和IP设置以及初始化步骤。
思维导图&笔记
见原文:EmbeddedNote:TCP和UDP基础通信模型 - Jun (lingjun.life)
UDP机械臂测试
机械臂
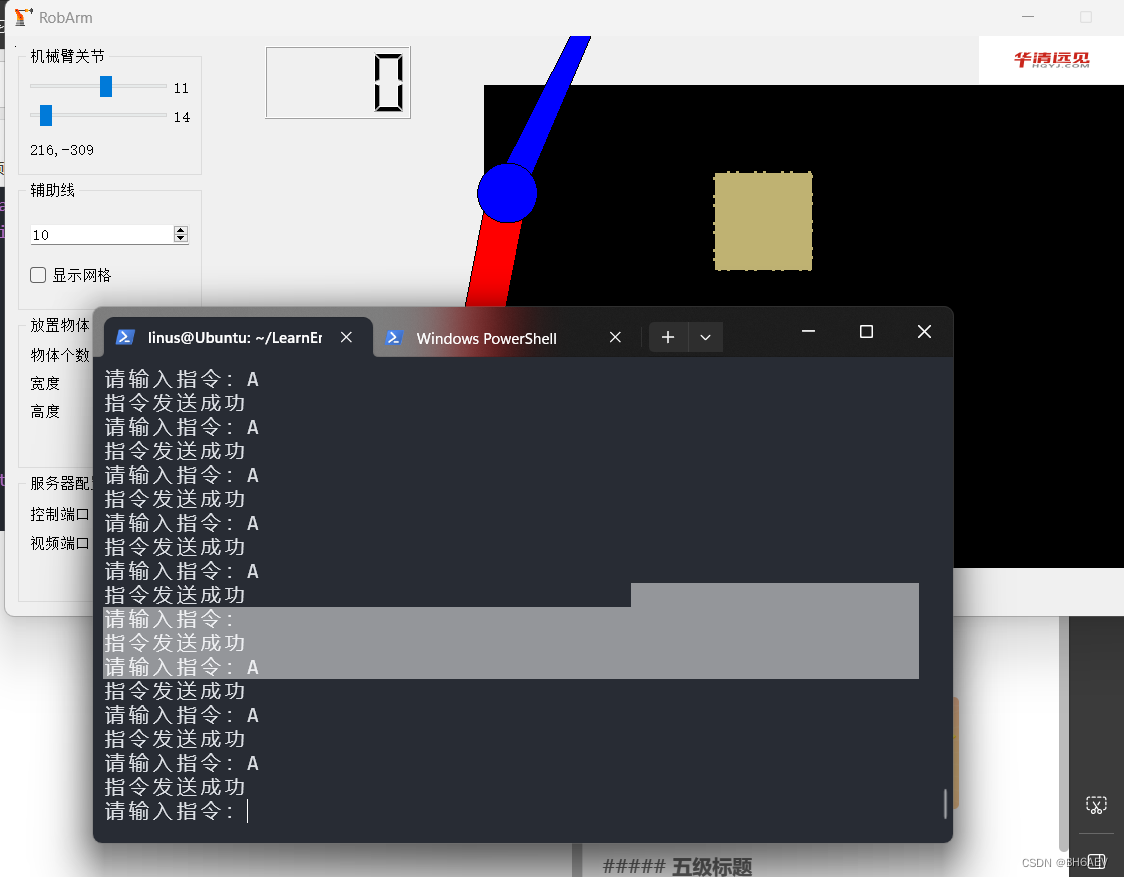
通过w(红色臂角度增大)s(红色臂角度减小)d(蓝色臂角度增大)a(蓝色臂角度减小)按键控制机械臂
注意:关闭计算机的杀毒软件,电脑管家,防火墙
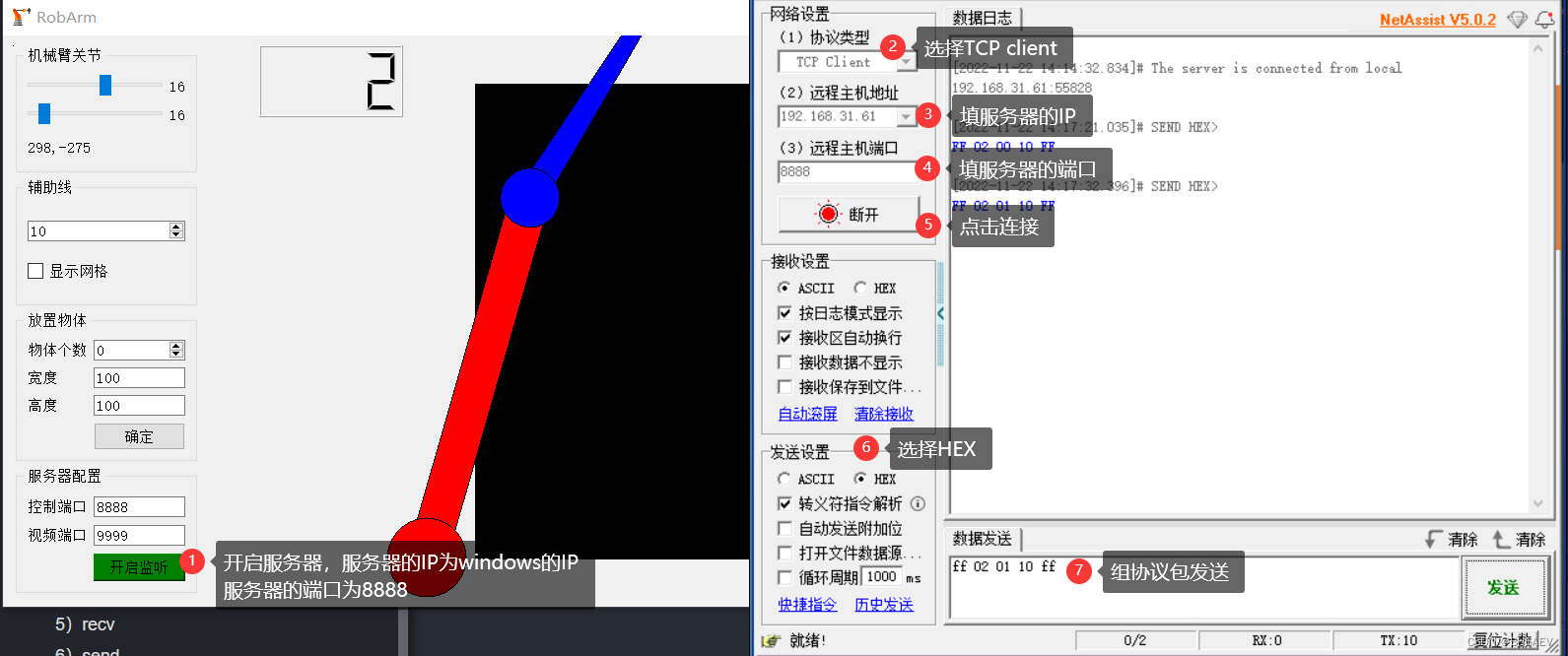
1)基于UDP服务器的机械臂,端口号是8888, ip是Windows的ip;
查看Windows的IP:按住Windows+r 按键,输入cmd , 输入ipconfig
2)点击软件中的开启监听;
3)机械臂需要发送16进制数,共5个字节,协议如下
0xff 0x02 x y 0xff
0xff:起始结束协议,固定的;
0x02:控制机械手臂协议,固定的;
x:指定要操作的机械臂
0x00 红色摆臂
0x01 蓝色摆臂
y:指定角度
/*
* Filename: 02tcpClint.c
* Author: linus
* Date: 2024-01-12
* Version: 1.0
*
* Description: The purpose of this code.
*/
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <sys/stat.h>
#include <pthread.h>
#include <string.h>
#include <signal.h>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/msg.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
int cfd;
struct sockaddr_in cin;
char send_buf[5];
int RobArmCtl(char buf[128])
{
static int x = 0, y = 0;
switch (buf[0])
{
case 'W':
x++;
send_buf[2] = 0x00;
send_buf[3] = x;
break;
case 'S':
send_buf[2] = 0x00;
send_buf[3] = x;
x--;
break;
case 'A':
y++;
send_buf[2] = 0x01;
send_buf[3] = y;
break;
case 'D':
y--;
send_buf[2] = 0x01;
send_buf[3] = y;
break;
default:
break;
}
send_buf[0] = 0xff;
send_buf[1] = 0x02;
send_buf[4] = 0xff;
write(cfd, send_buf, sizeof(send_buf));
}
int init()
{
send_buf[0] = 0xff;
send_buf[1] = 0x02;
send_buf[2] = 0x00;
send_buf[3] = 0x00;
send_buf[4] = 0xff;
write(cfd, send_buf, sizeof(send_buf));
send_buf[0] = 0xff;
send_buf[1] = 0x02;
send_buf[2] = 0x01;
send_buf[3] = 90;
send_buf[4] = 0xff;
write(cfd, send_buf, sizeof(send_buf));
}
int main(int argc, const char *argv[])
{
// 创建套接字
cfd = socket(AF_INET, SOCK_STREAM, 0);
cin.sin_family = AF_INET;
cin.sin_port = htons(8888);
cin.sin_addr.s_addr = inet_addr("192.168.125.27");
// 连接服务器
connect(cfd, (struct sockaddr *)&cin, sizeof(cin));
init();
char buf[128] = "";
while (1)
{
printf("请输入指令:");
fgets(buf, sizeof(buf), stdin);
buf[strlen(buf) - 1] = '\0';
RobArmCtl(buf);
printf("指令发送成功\n");
}
return 0;
}

















 740
740

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









