







一、设计目标
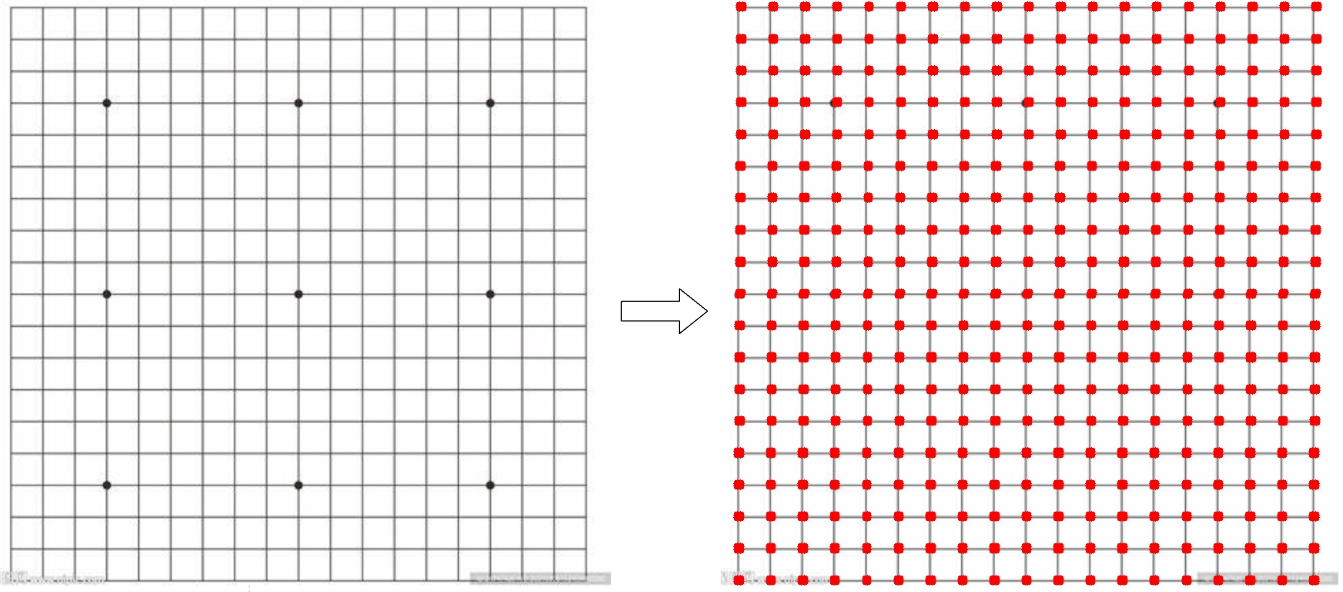
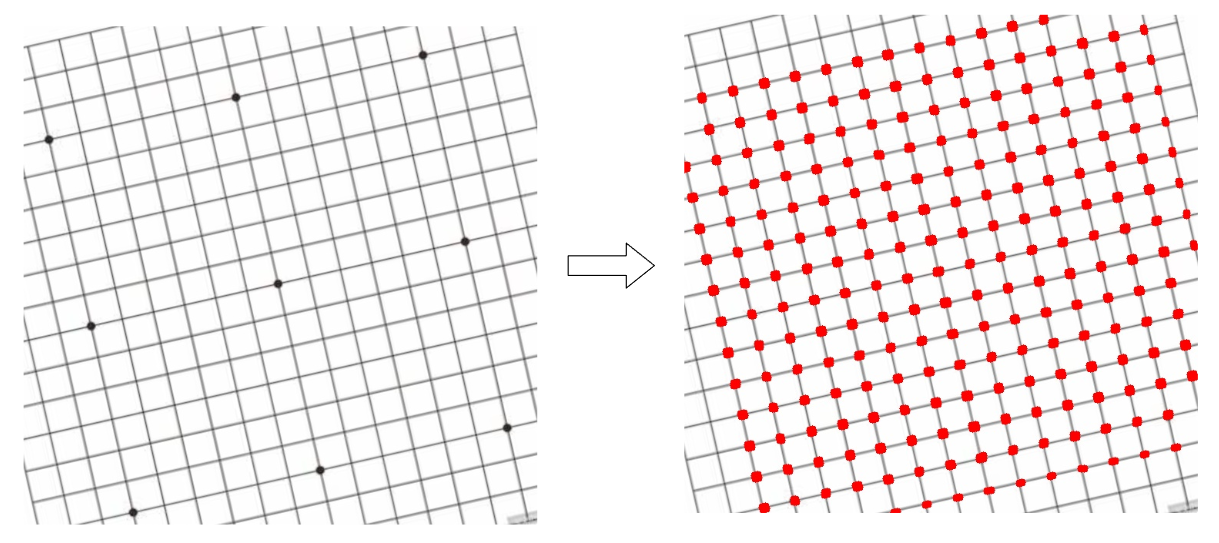
对于一个含有多个相邻四边形的图片,定位出其中每一个四边形的顶点。典型的案例如一个围棋棋盘,可以定位出所有的格子的点。
软件工具:
Python==3.9
opencv-python==4.10.0.84
numpy==1.22.4
二、工作流程
- 将输入图像转化为灰度值,并进行高斯滤波与Canny边缘检测
- 对图像进行霍夫变化,捕获图像中的直线
- 过滤霍夫变换的结果定位边框,给出定位点
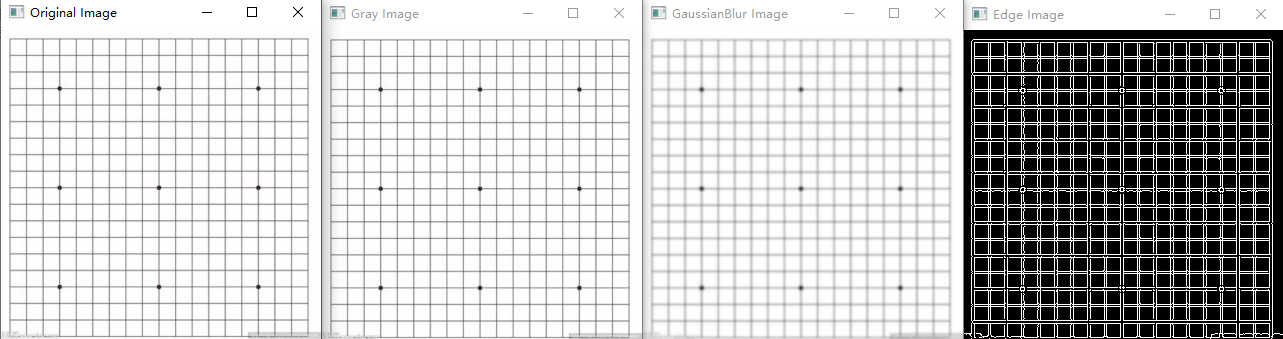
三、图像预处理
首先是载入图像,并进行简单的预处理,包括转化为灰度、高斯滤波、边缘检测:
import cv2
# 读取图片
orignal_img = cv2.imread(img_path)
# 简单预处理
imgGray = cv2.cvtColor(orignal_img, cv2.COLOR_RGB2GRAY)
imgBlur = cv2.GaussianBlur(imgGray, (5, 5), 1)
imgCanny = cv2.Canny(imgBlur, 60, 60)
# 显示
cv2.imshow("Original Image", orignal_img)
cv2.imshow("Gray Image", imgGray)
cv2.imshow("GaussianBlur Image", imgBlur)
cv2.imshow("Edge Image", imgCanny)
k = cv2.waitKey(0)
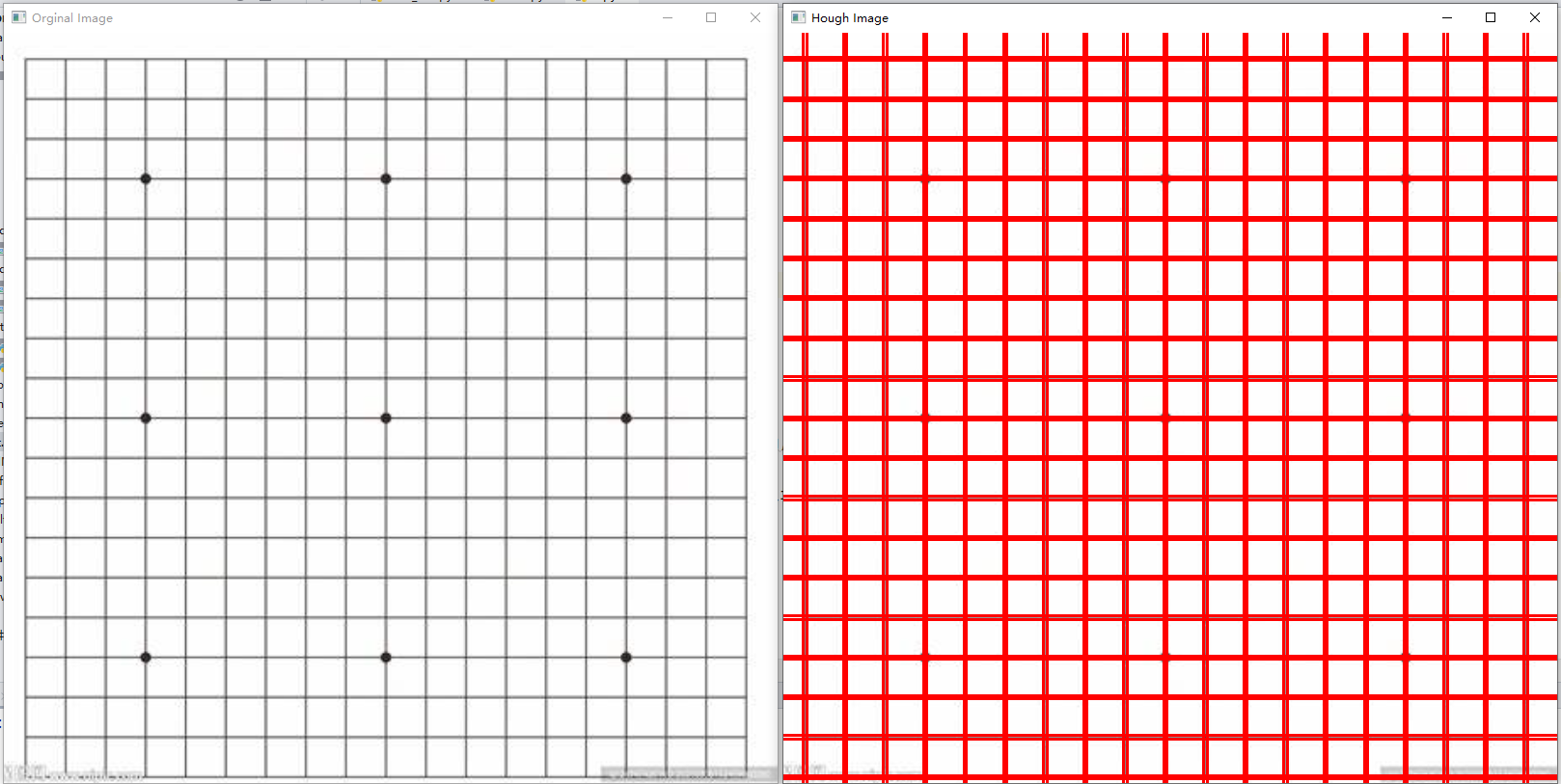
然后进行霍夫变换,霍夫变化用于检测矩形框构成的直线:
# img_org:原始图片
# img_edge:进行边缘检测后的图片
def get_hough_res(img_org, img_edge):
imgLines = img_org.copy()
# 霍夫变换
lines = cv2.HoughLines(img_edge, 1, np.pi / 180, 200, 300, 5)
# 计算坐标并绘制
for line in lines:
rho = line[0][0]
theta = line[0][1]
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
x1 = int(x0 + 1000 * (-b))
y1 = int(y0 + 1000 * (a))
x2 = int(x0 - 1000 * (-b))
y2 = int(y0 - 1000 * (a))
cv2.line(imgLines, (x1, y1), (x2, y2), (0, 0, 255), 2)
return imgLines
imgHough = get_hough_res(orignal_img, imgCanny)
cv2.imshow("Orginal Image", orignal_img)
cv2.imshow("Hough Image", imgHough)
cv2.waitKey(0)
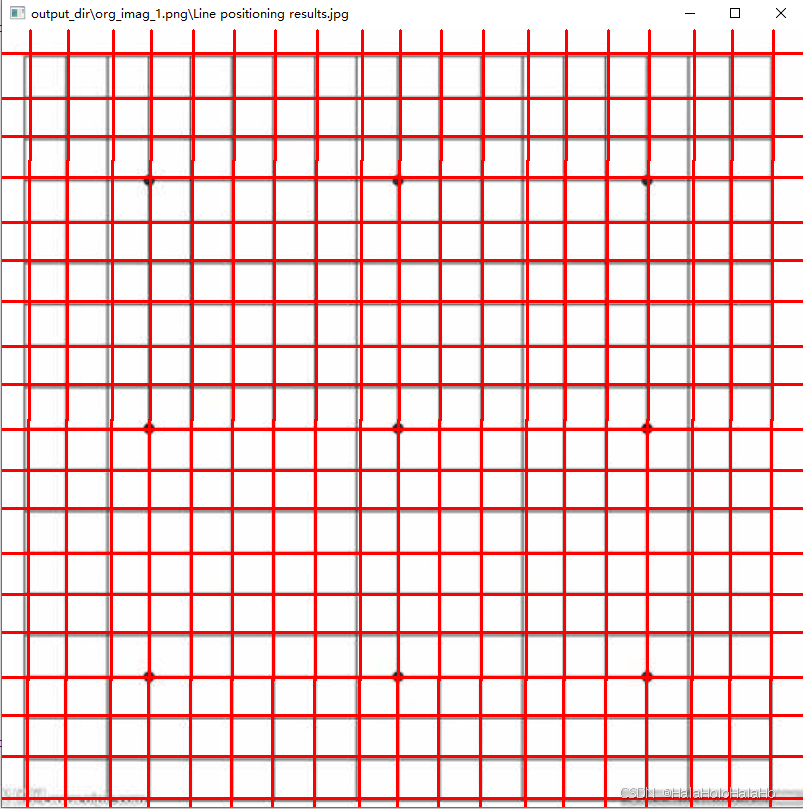
四、直线过滤
可以看出,霍夫变换的结果有很多重复划定的直线,这不利于我们进行处理划分矩形的边缘并定位四边形。因此,需要将相似位置的线去除。
对于两条直线,我们判断他们相似的依据是比较他们的斜率 k k k和截距 b b b。霍夫变换得到的是一条直线的两个点,因此我们首先将点换算为斜率 k k k和截距 b b b:
# 已知直线上两点(x1, y1)和(x2, y2),计算直线的斜率k和截距b
def calculate_slope_and_intercept(x1, y1, x2, y2):
k = (y2 - y1) / (x2 - x1 + 1)
if k < -200:
k = -200
b = y1 - k * x1
return k, b
但是直线的斜率依然不便于比较,当直线的角度过大的是,1°的差距可能导致极大的斜率数值变化。因此,我们使用 a r c t a n ( ⋅ ) arctan(\cdot) arctan(⋅)函数将直线的斜率转换回角度:
# 转换为角度
def convert_slope_to_angle(x):
y = math.degrees(math.atan(x))
return y
这样我们就能通过比较斜率和直线距离的方式来对直线进行过滤,过滤方法:
-
使用一个
list对象line_list存放过滤结果 -
遍历霍夫变换得到的直线:
-
对于第一条直线,直接选用
-
对于后续直线,与
line_list的直线进行比较:如果有相似直线则舍弃本直线,否则选用本直线
-
代码如下:
# 霍夫变换
lines = cv2.HoughLines(img_edge, 1, np.pi / 180, 200, 200, 5)
# 记录直线信息: (斜率,截距)
line_list = []
# 遍历霍夫变换得到的直线
for line in lines:
rho = line[0][0]
theta = line[0][1]
# 计算直线中两点的坐标
x1, y1, x2, y2 = calculate_coordinate(rho, theta)
# 计算这条直线的斜率
k_now, b_now = calculate_slope_and_intercept(x1, y1, x2, y2)
# 将斜率转化回角度
angle_of_k_now = convert_slope_to_angle(k_now)
if len(line_list) == 0: # 第一条直线直接加入
line_list.append((k_now, b_now))
else: # 后续直线进行判断
add_flag = 1
# 对已经选取的直线进行遍历
for i, (k, b) in enumerate(line_list):
# 将斜率转化回角度
angle_of_k = convert_slope_to_angle(k)
# 如果有角度相近的直线,就进行距离比较
if abs(angle_of_k_now - angle_of_k) <= threshold_k:
# 寻找同方向的线中是否有相似位置的线
d1 = calculate_distance_to_line(x1, y1, k, b)
d2 = calculate_distance_to_line(x2, y2, k, b)
if d1 < threshold or d2 < threshold:
add_flag = 0
# 如果现有信息中,不存在相似的直线,则添加当前线
if add_flag:
line_list.append((k_now, b_now))
# 在图片中标定直线
for (k, b) in line_list:
drawline(img_lines, k, b)
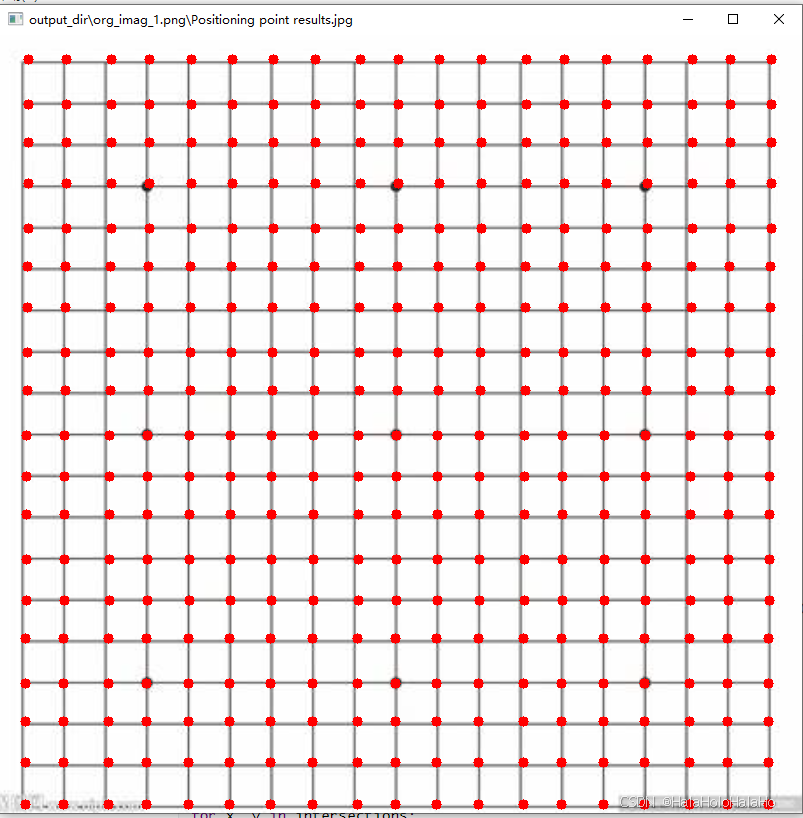
五、确定交点
过滤得到矩形边框对应的直线后,只需要进行进行直线的两两相交即可得到交点。
由于我们存储的是直线的斜率和截距信息,可以通过下面的方法计算交点。
# 已知两条直线的斜率k和截距b,求交点
def find_intersection(k1, b1, k2, b2):
# 检查斜率是否相等,如果相等,直线可能平行或重合
if k1 == k2:
if b1 == b2:
return -1, -1
else:
return -1, -1
x = (b2 - b1) / (k1 - k2)
y = int(k1 * x + b1)
x = int(x)
return x, y
那么,接下来就是简单轻松的两两求交点环节:
# 直线两两求交点
def find_all_intersections(img, line_list):
height, width = img.shape[:2]
intersections = []
num_lines = len(line_list)
# 直线两两求交
for i in range(num_lines):
for j in range(i + 1, num_lines):
k1, b1 = line_list[i]
k2, b2 = line_list[j]
# 只对斜率差别很大的直线进行求交点
if abs(convert_slope_to_angle(k1) - convert_slope_to_angle(k2)) >= 45:
# 已知两条直线的斜率k和截距b,求交点
x, y = find_intersection(k1, b1, k2, b2)
# 记录在图片坐标范围内的点
if 0 <= x <= width-1 and 0<= y <= height -1:
intersections.append((x, y))
return intersections
# 在图片中标定交点
for x, y in intersections:
cv2.circle(img_intersection, (x, y), radius=5, color=(0, 0, 255), thickness=-1)
六、工程源码
- github: Rectangle-Detection


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









