







问题背景
在用YOLOv8做定向包围框检测,使用roboflow平台进行标注。已经训练好模型后发现需要补充数据集,于是打算用模型先进行一次识别,之后再导入平台进行精细标注。
问题出现
虽然roboflow平台支持导入注释,但其对于obb格式只支持导出;如果直接导入yolo obb格式的标注,roboflow会将其视为普通目标检测,只会生成一系列水平矩形框,无法达到理想效果。
问题解决
由于yolo定向包围框的格式为「 类别+四个坐标点」,与yolo实例分割任务的格式「 类别+多个坐标点」十分类似,而roboflow是支持导入yolo实例分割的数据集格式的,所以可以将yolo obb格式的数据集注释以实例分割的格式导入。
class_index x1 y1 x2 y2 x3 y3 x4 y4class_index x1 y1 x2 y2 ... xn yn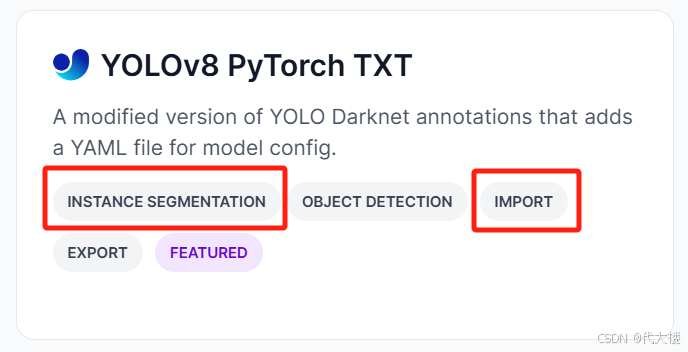
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3384
3384

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









