







凸包求解
【问题描述】
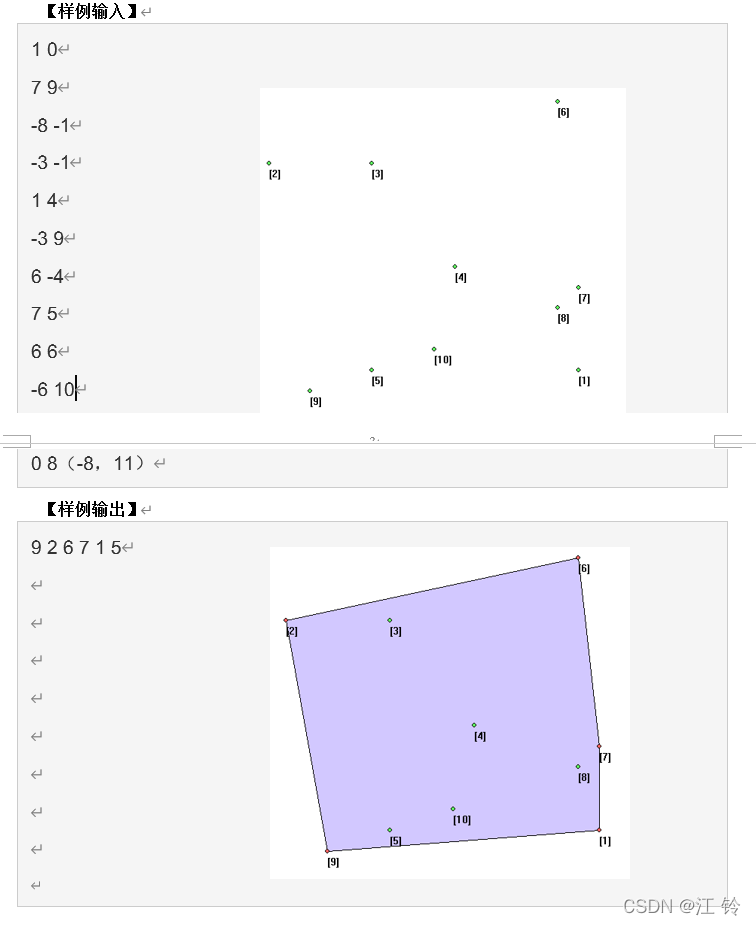
凸包是一种基础的几何结构,在地理信息科学领域广泛应用。给出一组平面上的点,构造出对应的凸包,并依次输出极点编号。
【输入格式】
第一行即输入点的总数n,接下来n行依次给出各点的横纵坐标,横坐标与纵坐标间用空格分隔,如样例所描述。
【输出格式】
依次输出各个极点的对应编号(编号从1开始,而非0)。
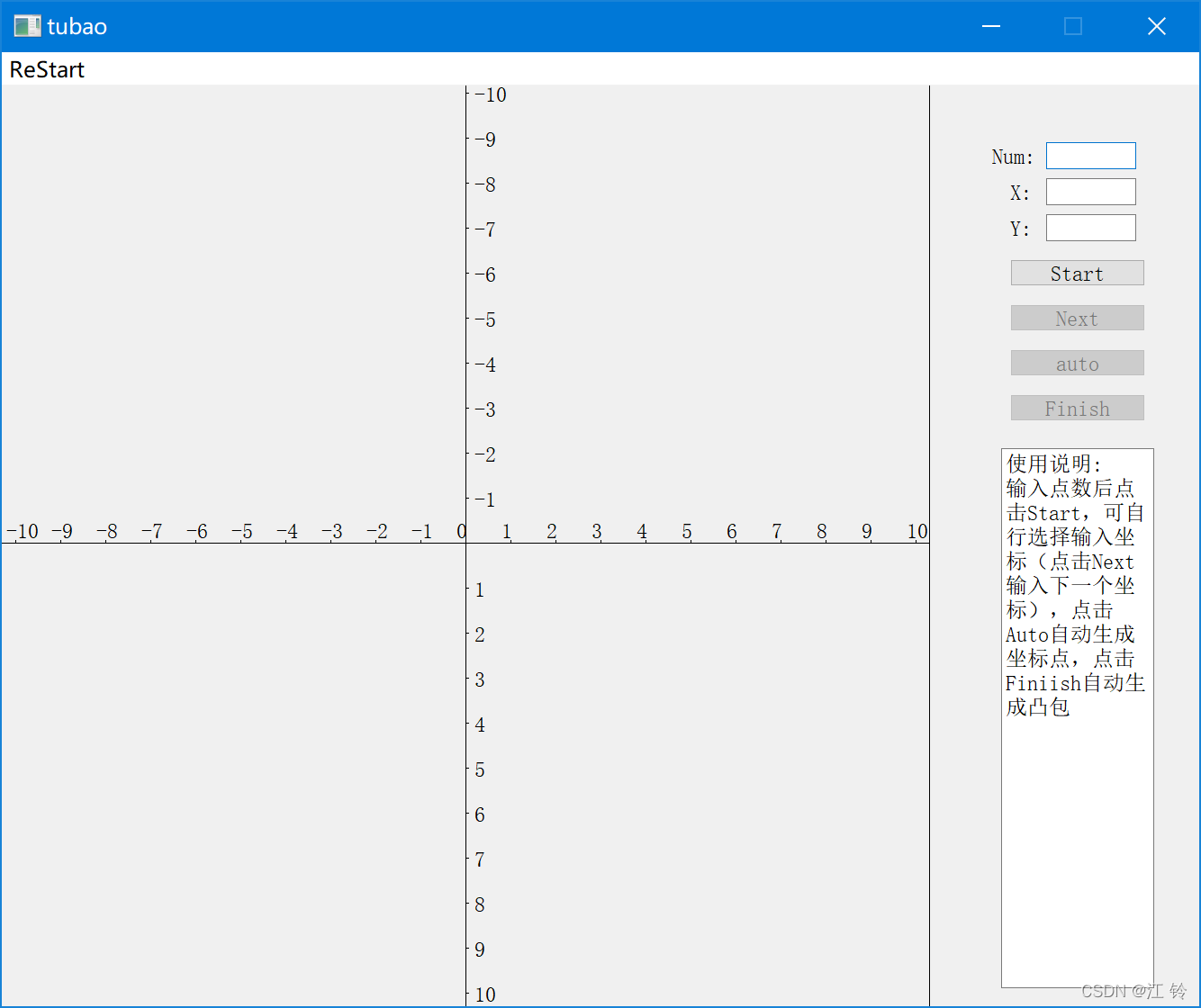
可基于界面编程将凸包可视化。要求算法代码和界面代码分离。
原理分析:
- 找到所有点中纵坐标y最小的点,也就是这些点中最下面的点,记为p0。
- 然后计算其余点与该点的连线与x轴之间夹角的余弦值,将这些点按其对于最低点的正弦值从大到小排序,排序好的点记为p1, p2, p3, …
- 将最低点p0和排序好的点中的第一个点p1压入栈中,然后从p2开始计算,计算栈顶两个点与该点三点向量是否是逆时针转动,若是,则将该点压入栈中,否则将栈顶元素推出。(此处对栈的概念不清楚可自行搜索)
- 最后栈里面元素就是所有的凸包外围的点
判断是否为逆时针旋转
area = (b.x-a.x) * (c.y-a.y) - (b.y-a.y) * (c.x-a.x)
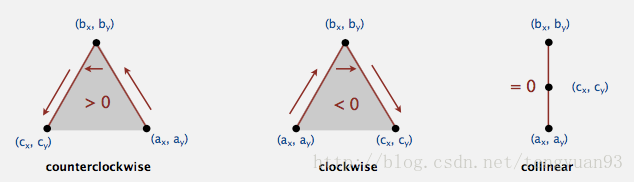
area >0,A-B-C逆时针旋转;
area <0,A-B-C顺时针旋转;
area =0,A-B-C在一条直线上。
核心代码部分(C++头文件如下)
#pragma once
#include<iostream>
#include<cmath>
#include<stack>
using namespace std;
struct ConPnt
{
int x;
int y;
float coszhi;
ConPnt(int xx = 0, int yy = 0, double cosV = 0)
{
x = xx;
y = yy;
coszhi = cosV;
};
};
ConPnt* finalpoints;
ConPnt* rawpoint;
stack<ConPnt>resultpoint;
int Ptotal;
//复制函数
void copyConPnt() {
memcpy(finalpoints, rawpoint, sizeof(struct ConPnt) * Ptotal);
}
//找到Y值最小的点
int SortY(ConPnt* points) {
int Min = 0;
for (int i = 1; i < Ptotal; i++) {
if (points[i].y < points[Min].y)
Min = i;
if (points[i].y == points[Min].y)
{
if (points[i].x < points[Min].x)
Min = i;
}
}
return Min;
}
//计算余弦值
void Calculate(ConPnt* points, int Min) {
for (int i = 0; i < Ptotal; i++) {
if (i == Min) {
points[i].coszhi = 1;
}
else {
//与X轴组成的直角三角形
double xfang = pow((points[i].x - points[Min].x), 2);
double yfang = pow((points[i].y - points[Min].y), 2);
points[i].coszhi = (points[i].x - points[Min].x) / sqrt(xfang + yfang);
}
}
}
//按照cos值排序,使用选择排序
void sortpoint(ConPnt*points) {
ConPnt temp;
for (int i = 0; i < Ptotal; i++) {
//max变量保存该趟比较过程中,最大元素所对应的索引,
//先假设前面的元素为最大元素
int maxIndex = i;
/*每趟比较,将前面的元素与其后的元素逐个比较*/
for (int j = i + 1; j < Ptotal; j++) {
//如果后面的元素大,将后面元素的索引极为最大值的索引
if (points[j].coszhi > points[maxIndex].coszhi) {
maxIndex = j;
}
if (points[j].coszhi == points[maxIndex].coszhi) {
if (points[j].x < points[maxIndex].x)
{
maxIndex = j;
}
if (points[j].x == points[maxIndex].x)
{
if (points[j].y > points[maxIndex].y)
{
maxIndex = j;
}
}
}
}
//然后交换此次查找到的最大值和原始的最大值
if (points[maxIndex].coszhi >= points[i].coszhi) {
temp = points[i];
points[i] = points[maxIndex];
points[maxIndex] = temp;
}
}
int a = 0;
}
/*判断是否为逆时针旋转
area = (b.x - a.x) * (c.y - a.y) - (b.y - a.y) * (c.x - a.x)
area > 0,A - B - C逆时针旋转;
area < 0,A - B - C顺时针旋转;
area = 0,A - B - C在一条直线上。*/
int Counterclockwise(ConPnt a,ConPnt b,ConPnt c) {
int area = (b.x - a.x) * (c.y - a.y) - (b.y - a.y) * (c.x - a.x);
return area;
}
//一条直线上是同向还是异向
int tongyixiang(ConPnt a, ConPnt b, ConPnt c)
{
int Direction = (b.x - a.x) * (c.x - a.x) + (b.y - a.y) * (c.y - a.y);
return Direction;
}
//Graham扫描法
void Graham(ConPnt*points)
{
resultpoint.push(points[0]);
resultpoint.push(points[1]);
for (int i = 2; i < Ptotal;)
{
ConPnt temp = resultpoint.top();
resultpoint.pop();
//若是在同一侧那么压到结果数组中
if (Counterclockwise(resultpoint.top(), temp, points[i]) >0)
{
resultpoint.push(temp);
resultpoint.push(points[i]);
i++;
}
if (Counterclockwise(resultpoint.top(), temp, points[i]) == 0)
{
if (tongyixiang(resultpoint.top(), temp, points[i]) > 0)
{
resultpoint.push(temp);
resultpoint.push(points[i]);
i++;
}
}
}
}
//判断是否重复
bool twice(ConPnt a, ConPnt b[],int m)
{
for (int i = 0; i < m; i++)
{
if (a.x == b[i].x && a.y == b[i].y)
{
return true;
}
}
return false;
}
void clearall()
{
delete rawpoint;
delete finalpoints;
while (!resultpoint.empty())
{
resultpoint.pop();
}
}
结果
见图片中的使用说明
点击restart可重新绘制

注意
使用参考中的思想会存在部分问题
1.点数过多会出现边界点连接顺序错误
2.一些与Y值最小点连线为同一线的不同点也会被连接
3.点击程序外,绘制的线条会消失(可能与QT的repaint函数有关)
已经在代码中进行了修改
1.增加判断连线若在一条线,同向还是异向
2.排序时按照cos值(若需要),Y值,X值的顺序
即,第一遍排Y值时若相同再比X值,第二遍若COS值相同,就比较Y值,Y值相同比较X值,可避免1,2问题
凸包算法(convex hull)
https://blog.youkuaiyun.com/qq_39747794/article/details/81563346?ops_request_misc=&request_id=&biz_id=102&utm_term=Convex%20Hull&utm_medium=distribute.pc_search_result.none-task-blog-2blogsobaiduweb~default-4-81563346.nonecase&spm=1018.2226.3001.4450


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









