y
(
t
)
=
s
(
t
)
⊗
h
(
t
)
=
∫
−
∞
∞
s
(
u
)
h
(
t
−
u
)
d
u
=
∫
−
∞
∞
s
(
t
−
u
)
h
(
u
)
d
u
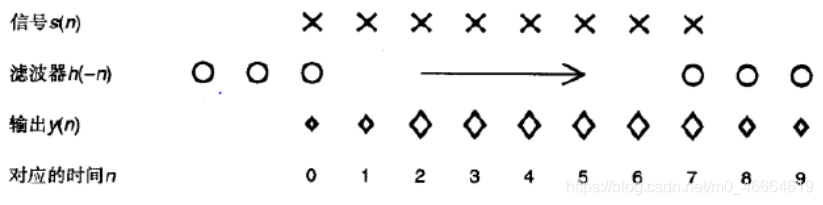
y(t)=s(t) \otimes h(t) =\int_{-\infty}^{\infty} s(u) h(t-u) d u =\int_{-\infty}^{\infty} s(t-u) h(u) d u
y(t)=s(t)⊗h(t)=∫−∞∞s(u)h(t−u)du=∫−∞∞s(t−u)h(u)du
Φ
s
h
(
t
)
=
Φ
s
h
∗
(
−
t
)
\Phi_{\mathrm{sh}}(t)=\Phi_{\mathrm{sh}}^{*}(-t)
Φsh(t)=Φsh∗(−t)
二维卷积 定义:
y
(
t
1
,
t
2
)
=
s
(
t
1
,
t
2
)
⊗
h
(
t
1
,
t
2
)
=
∫
−
∞
∞
∫
−
∞
∞
s
(
u
1
,
u
2
)
h
(
t
1
−
u
1
,
t
2
−
u
2
)
d
u
1
d
u
2
=
∫
−
∞
∞
∫
−
∞
∞
s
(
t
1
−
u
1
,
t
2
−
u
2
)
h
(
u
1
,
u
2
)
d
u
1
d
u
2
\begin{aligned} y\left(t_{1}, t_{2}\right) &=s\left(t_{1}, t_{2}\right) \otimes h\left(t_{1}, t_{2}\right) \\ &=\int_{-\infty}^{\infty} \int_{-\infty}^{\infty} s\left(u_{1}, u_{2}\right) h\left(t_{1}-u_{1}, t_{2}-u_{2}\right) d u_{1} d u_{2} \\ &=\int_{-\infty}^{\infty} \int_{-\infty}^{\infty} s\left(t_{1}-u_{1}, t_{2}-u_{2}\right) h\left(u_{1}, u_{2}\right) d u_{1} d u_{2} \end{aligned}
y(t1,t2)=s(t1,t2)⊗h(t1,t2)=∫−∞∞∫−∞∞s(u1,u2)h(t1−u1,t2−u2)du1du2=∫−∞∞∫−∞∞s(t1−u1,t2−u2)h(u1,u2)du1du2
h
(
t
1
,
t
2
)
=
h
1
(
t
1
)
⊗
h
2
(
t
2
)
h\left(t_{1}, t_{2}\right)=h_{1}\left(t_{1}\right) \otimes h_{2}\left(t_{2}\right)
h(t1,t2)=h1(t1)⊗h2(t2)
根据卷积结合律,滤波常用的二维卷积计算方式如下:
y
(
t
1
,
t
2
)
=
s
(
t
1
,
t
2
)
⊗
[
h
1
(
t
1
)
⊗
h
2
(
t
2
)
]
=
[
s
(
t
1
,
t
2
)
⊗
h
1
(
t
1
)
]
⊗
h
2
(
t
2
)
\begin{aligned} y\left(t_{1}, t_{2}\right) &=s\left(t_{1}, t_{2}\right) \otimes\left[h_{1}\left(t_{1}\right) \otimes h_{2}\left(t_{2}\right)\right] \\ &=\left[s\left(t_{1}, t_{2}\right) \otimes h_{1}\left(t_{1}\right)\right] \otimes h_{2}\left(t_{2}\right) \end{aligned}
y(t1,t2)=s(t1,t2)⊗[h1(t1)⊗h2(t2)]=[s(t1,t2)⊗h1(t1)]⊗h2(t2)
y
(
n
1
,
n
2
)
=
s
(
m
1
,
m
2
)
⊗
h
(
n
1
,
n
2
)
=
∑
m
1
=
0
M
1
∑
m
2
=
0
M
2
s
(
n
1
−
m
1
,
n
2
−
m
2
)
h
(
m
1
,
m
2
)
=
∑
m
1
=
n
1
−
(
M
1
−
1
)
n
1
∑
m
2
=
n
2
−
(
M
2
−
1
)
n
2
s
(
m
1
,
m
2
)
h
(
n
1
−
m
1
,
n
2
−
m
2
)
\begin{aligned} y\left(n_{1}, n_{2}\right) &=s\left(m_{1}, m_{2}\right) \otimes h\left(n_{1}, n_{2}\right) \\ &=\sum_{m_{1}=0}^{M_{1}} \sum_{m_{2}=0}^{M_{2}} s\left(n_{1}-m_{1}, n_{2}-m_{2}\right) h\left(m_{1}, m_{2}\right) \\ &=\sum_{m_{1}=n_{1}-\left(M_{1}-1\right)}^{n_{1}} \sum_{m_{2}=n_{2}-\left(M_{2}-1\right)}^{n_{2}} s\left(m_{1}, m_{2}\right) h\left(n_{1}-m_{1}, n_{2}-m_{2}\right) \end{aligned}
y(n1,n2)=s(m1,m2)⊗h(n1,n2)=m1=0∑M1m2=0∑M2s(n1−m1,n2−m2)h(m1,m2)=m1=n1−(M1−1)∑n1m2=n2−(M2−1)∑n2s(m1,m2)h(n1−m1,n2−m2)
二维卷积滤波器可以解耦为
h
(
n
1
,
n
2
)
=
h
1
(
n
1
)
⊗
h
2
(
n
2
)
h\left(n_{1}, n_{2}\right)=h_{1}\left(n_{1}\right) \otimes h_{2}\left(n_{2}\right)
h(n1,n2)=h1(n1)⊗h2(n2)
g
(
t
1
−
α
t
2
,
t
2
)
⟷
G
(
f
1
,
f
2
+
α
f
1
)
g\left(t_{1}-\alpha t_{2}, t_{2}\right) \longleftrightarrow G\left(f_{1}, f_{2}+\alpha f_{1}\right)
g(t1−αt2,t2)⟷G(f1,f2+αf1)
g
(
t
1
,
t
2
−
α
t
1
)
⟷
G
(
f
1
+
α
f
2
,
f
2
)
g\left(t_{1}, t_{2}-\alpha t_{1}\right) \longleftrightarrow G\left(f_{1}+\alpha f_{2}, f_{2}\right)
g(t1,t2−αt1)⟷G(f1+αf2,f2)
某一域中的角度旋转将导致另一域中同样的角度旋转:
g
(
t
1
′
,
t
2
′
)
⟷
G
(
f
1
′
,
f
2
′
)
g\left(t_{1}^{\prime}, t_{2}^{\prime}\right) \longleftrightarrow G\left(f_{1}^{\prime}, f_{2}^{\prime}\right)
g(t1′,t2′)⟷G(f1′,f2′)
g
(
x
)
=
∑
i
g
d
(
i
)
h
(
x
−
i
)
g(x)=\sum_{i} g_{d}(i) h(x-i)
g(x)=∑igd(i)h(x−i)
h(x)称为插值因子或插值核。在实际应用时,核是x的偶函数,故h(x - i)= h(i -x)。i处的样本被核(i-x)加权。插值点x处的g(x)等于插值核内的样本
g
d
(
i
)
g_{d}(i)
gd(i)与h(i-x)的乘积之和,即g(x)等于x邻域样本的加权和。
sinc插值 条件:1.信号是带限的,即最高频率有界;2采样满足麦奎斯特频率
重建方程 sinc核h(x),插值信号g(x)
h
(
x
)
=
sinc
(
x
)
=
sin
(
π
x
)
π
x
g
(
x
)
=
∑
i
g
d
(
i
)
sinc
(
x
−
i
)
\begin{array}{l} h(x)=\operatorname{sinc}(x)=\frac{\sin (\pi x)}{\pi x} \\ g(x)=\sum_{i} g_{d}(i) \operatorname{sinc}(x-i) \end{array}
h(x)=sinc(x)=πxsin(πx)g(x)=∑igd(i)sinc(x−i)
注意插值核的归一化
2.8 点目标分析
IRW:冲击响应宽度指冲击响应的3dB主瓣宽度,在SAR处理中又称为图像分辨率。
PSLR:峰值旁瓣比指最大旁瓣与主瓣的高度比,sinc函数为-13dB,比较大。
一维ISLR:
ISLR
=
10
log
10
{
P
total
−
P
main
P
main
}
\text { ISLR }=10 \log _{10}\left\{\frac{P_{\text {total }}-P_{\text {main }}}{P_{\text {main }}}\right\}
ISLR =10log10{Pmain Ptotal −Pmain }


























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









