







**非常详细的视频和文字教程,讲解常见的openmv教程包括 巡线、物体识别、圆环识别、阈值自动获取等。非常适合学习openmv、K210、K230等项目
视频合集链接在
openmv教程合集 openmv入门到项目开发 openmv和STM32通信 openmv和opencv区别 openmv巡线 openmv数字识别教程LCD
3.6 - 圆环中心识别
3.6.0-圆环识别和执行结构如何合作
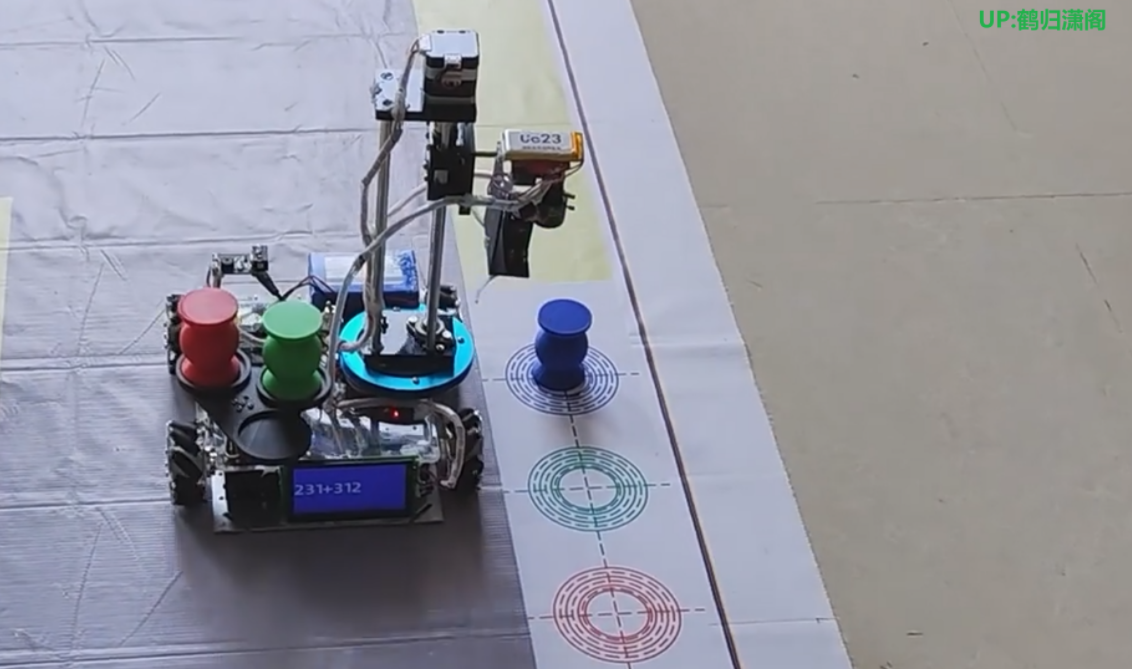
目的最后是控制小车把东西放在圆环中间

先识别圆环位置,知道圆环圆心所在像素位置
升降式结构
升降机构中把摄像头安装在升级机构的上端
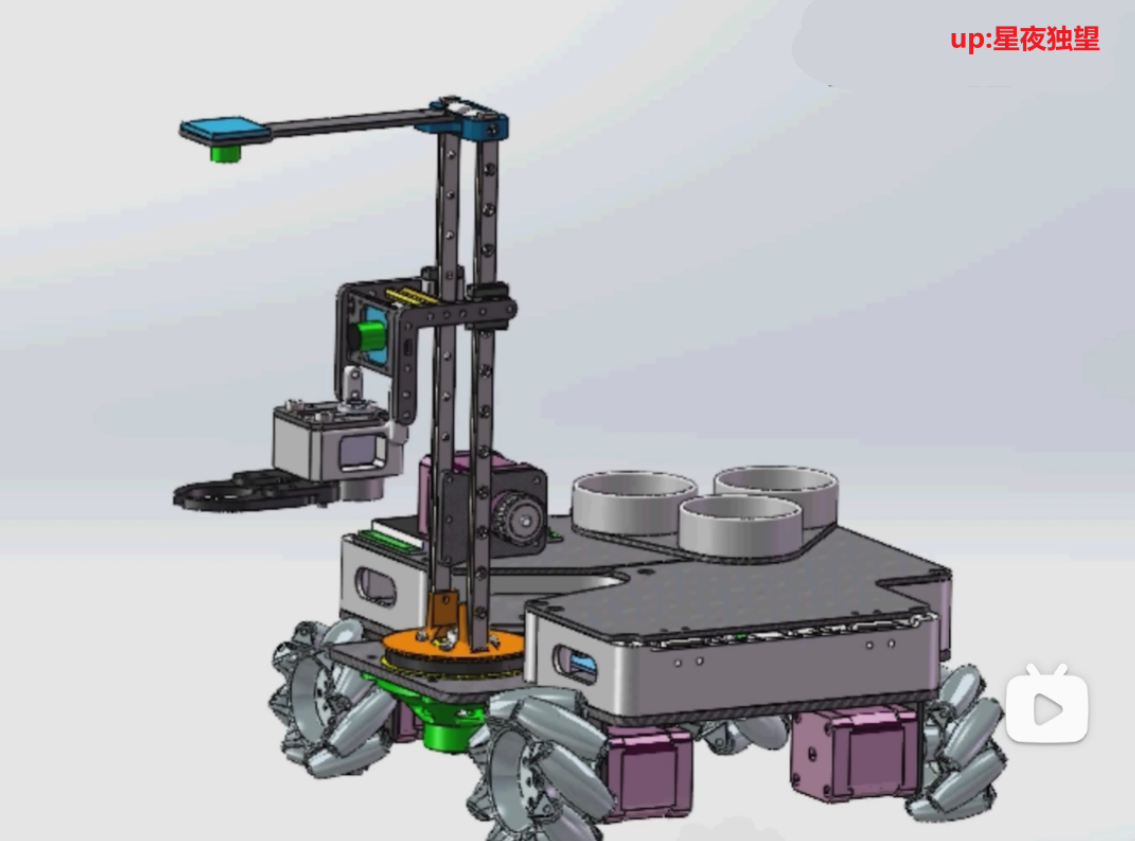
升降机构中把摄像头安装在 夹子上面
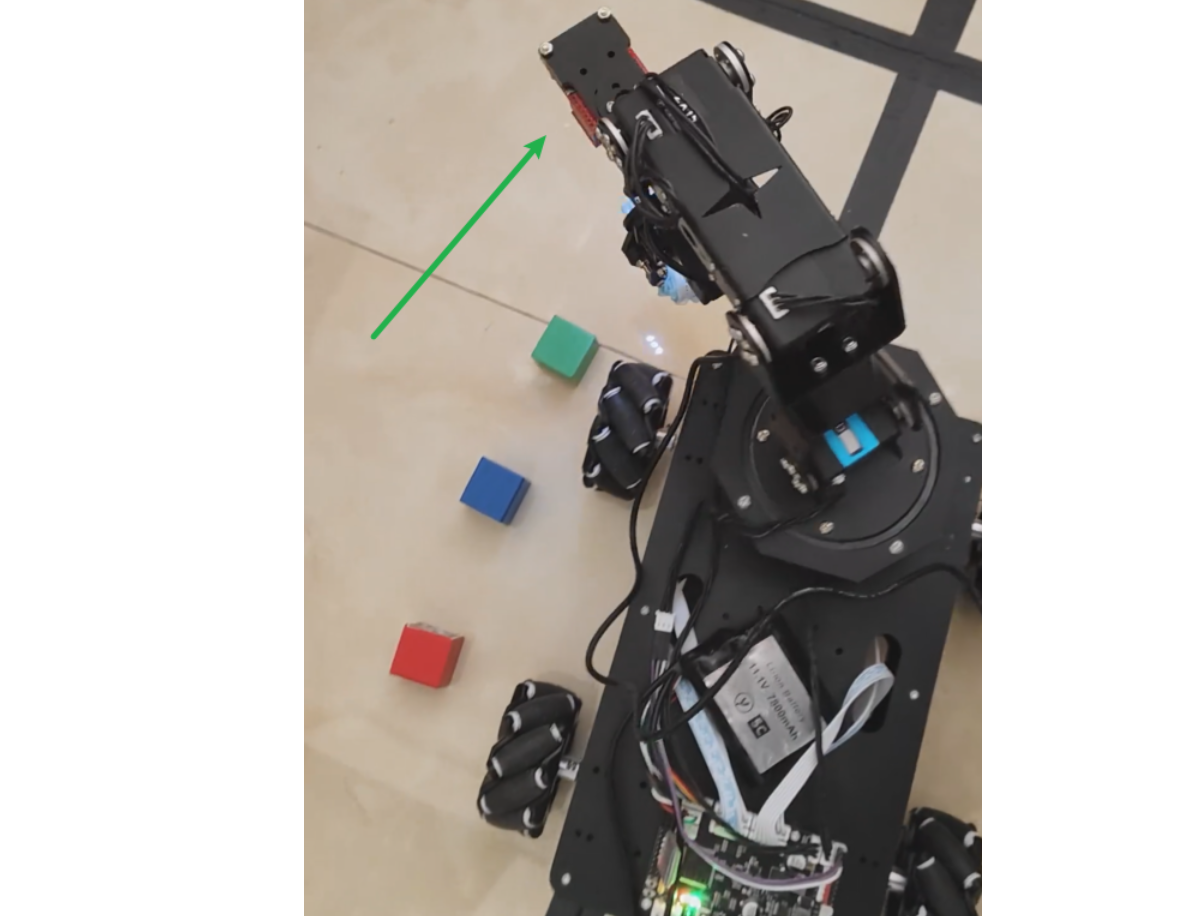
多自由度机械臂
多自由度机械臂的摄像头一般安装在前端

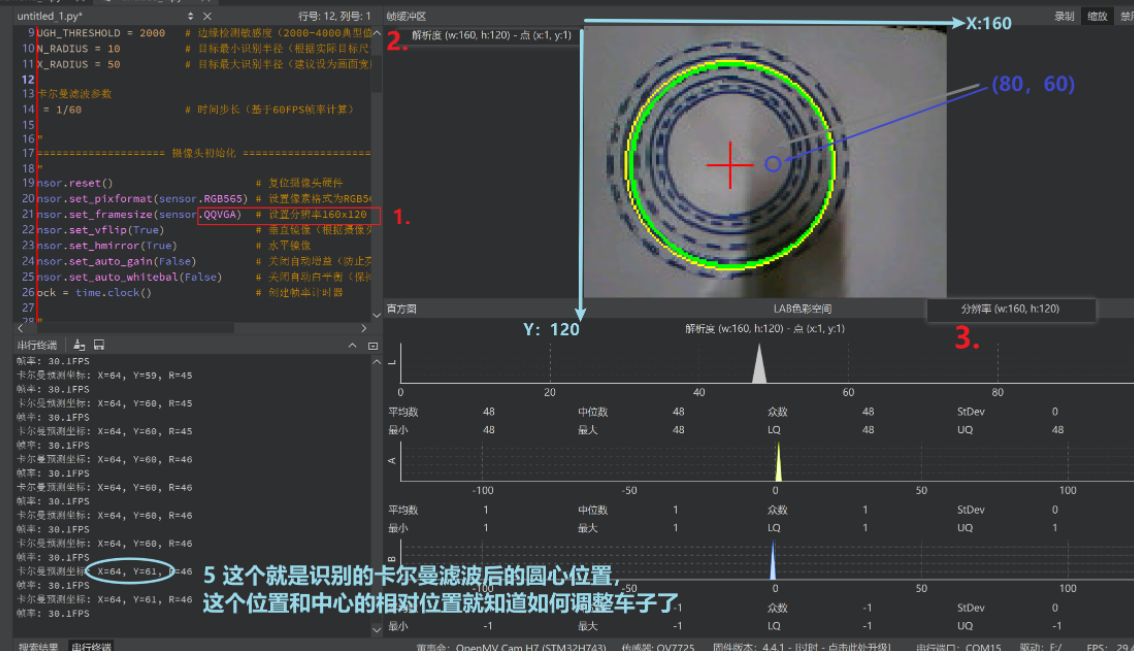
然后假设 小车的执行装置(夹子等)会把东西放到画幅中间(就是80,60)这个位置,那么就是调整小车,根据识别的圆心比如现在(64,61)这个位置和中心位置(80,60)的关系调整,比如这个时候小车就应该向左边移动一些,这样圆环的中心就距离画幅中心更靠近了。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











