







 本文介绍在树莓派上利用OpenCV检测图像中的圆形,裁剪后进行二值化处理,通过寻找最大目标块计算其与圆心的偏移角度。涉及知识点包括图像二值化、连通域分析。最后展示了部分关键代码。
本文介绍在树莓派上利用OpenCV检测图像中的圆形,裁剪后进行二值化处理,通过寻找最大目标块计算其与圆心的偏移角度。涉及知识点包括图像二值化、连通域分析。最后展示了部分关键代码。
前言
上一篇为文中和大家分享如何检测图像中的圆,本篇继续和大家分享项目中的其他内容,项目的目标是坚持检测物体中的一个晶体,并计算它的偏移角度。

思路
- 检测图像中的圆形,并把圆形的区域裁剪下来,这样就可以排除一些干扰,这一步前面一篇文章已经分享。

- 对裁剪得到的图进行二值化处理。
- 寻找最大的目标块,找到目标块的中心点,根据该点和圆心的点计算角度。
知识点
- 二值化
图像的二值化就是将图像上的像素点的灰度值设置为0或255,这样将使整个图像呈现出明显的黑白效果。在数字图像处理中,二值图像占有非常重要的地位,图像的二值化使图像中数据量大为减少,从而能凸显出目标的轮廓。OpenCV中提供了函数cv::threshold();
函数原型:
double cv::threshold(InputArray src,
OutputArray dst,
double thresh,
double maxval,
int type)
参数说明
src:源图像,可以为8位的灰度图,也可以为32位的彩色图像。(两者由区别)
dst:输出图像
thresh:阈值
maxval:dst图像中最大值
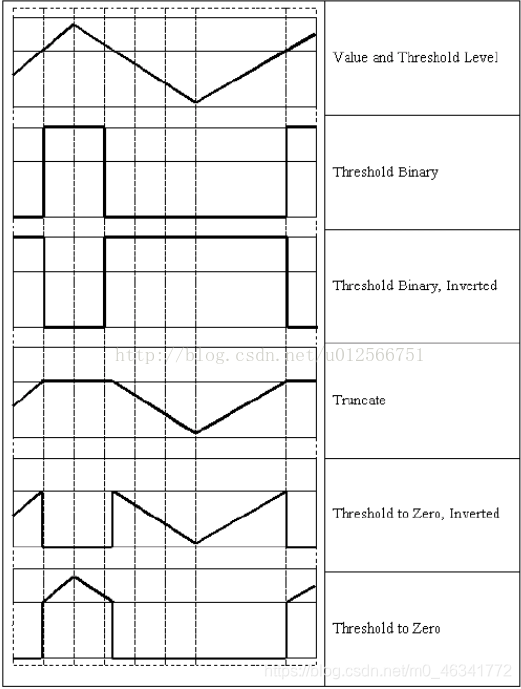
type:阈值类型,可以具体类型如下:
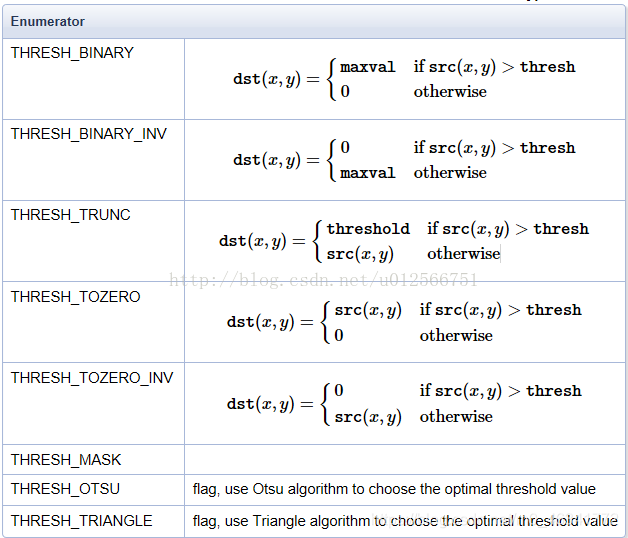
生成关系如下表:
- 连通域分析
函数原型:
int cv::connectedComponents (
cv::InputArrayn image, // //8位单通道二值图像 (binary)
cv::OutputArray labels, // output label map //和原图一样大的标记图
int connectivity = 8, // 4- or 8-connected components
int ltype = CV_32S // Output label type (CV_32S or CV_16U)
);
int cv::connectedComponentsWithStats (
cv::InputArrayn image, // input 8-bit single-channel (binary)
cv::OutputArray labels, // output label map
cv::OutputArray stats, // Nx5 matrix (CV_32S) of statistics:
// [x0, y0, width0, height0, area0;//nccomps×5的矩阵 表示每个连通区域的外接矩形和面积(pixel)
// ... ; x(N-1), y(N-1), width(N-1), height(N-1), area(N-1)]
cv::OutputArray centroids, //nccomps×2的矩阵 表示每个连通区域的质心(pixel)Nx2 CV_64F matrix of centroids: [ cx0, cy0; ... ; cx(N-1), cy(N-1)]
int connectivity = 8, // 4- or 8-connected 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1010
1010

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









