







Search Based Pathing Planning
参考:https://www.bilibili.com/video/BV1yT4y1T7Eb
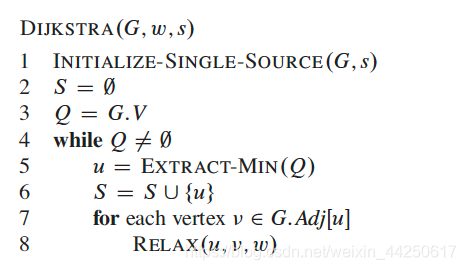
Dijkstra
流程
- 从起点开始扩展,每一步为一个节点找到最短路径
- cost:f(n) = g(n)
- g(n):当前路径,从起点到n的代价(距离)
- While true:
- 从open list选择代价最小的节点,收录进closed list
- 收录后遍历该节点的所有可访问邻节点,更新cost
- 最优性证明:反证法
特性
完备
最优
算法
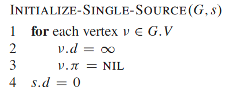
开始
将起点放入 open list
While 1
if open list 为空
无可行路径,搜索失败
取出 open list 中 cost=g(n) 最小的节点为 current
将 current 放入 closed list
if current 为终点
找到路径,结束
遍历 current 的邻节点 neighbour
if neighbour为障碍物,跳过
if neighbour 已被 closed list 收录,跳过
if neighbour 在 open list 中
更新 neighbour g(n)
else
计算 neighbour g(n),加入 open list
结束
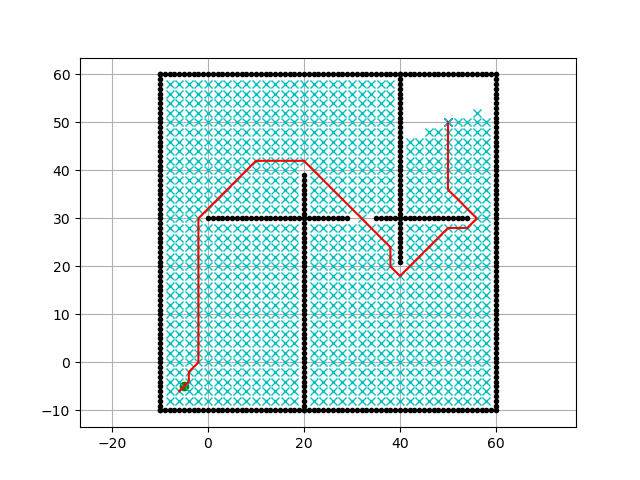
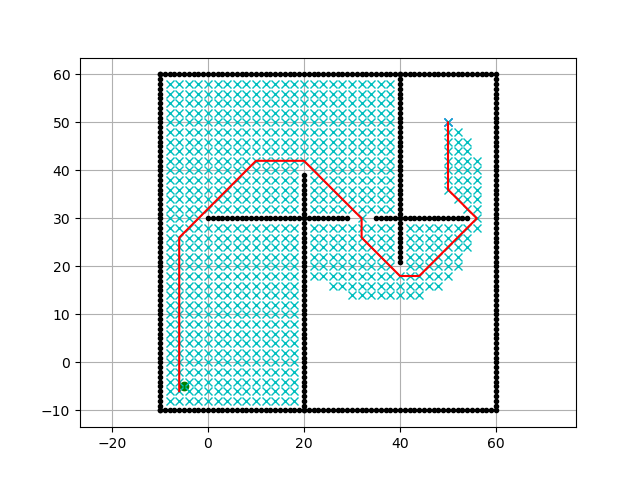
效果
A*
motivation
减少收录的栅格数目,增加搜索速度
在Dijkstra上的改进
-
cost:f(n) = g(n) + h(n)
-
g(n):当前路径,从起点到n的代价(距离)
-
h(n):启发式函数,一般取当前点到终点的距离
-
While true:
- 从open list选择代价最小的节点,收录进closed list
- 收录后遍历该节点的所有可访问邻节点,更新cost
-
最优性保证:h(n) ≤ \le ≤ *h(n)
特性
完备
最优
算法
开始
将起点放入 open list
While 1
if open list 为空
无可行路径,搜索失败
取出 open list 中 cost=g(n)+h(n) 最小的节点为 current
将 current 放入 closed list
if current 为终点
找到路径,结束
遍历 current 的邻节点 neighbour
if neighbour为障碍物,跳过
if neighbour 已被 closed list 收录,跳过
if neighbour 在 open list 中
更新 neighbour g(n)
else
计算 neighbour g(n),加入 open list
结束
效果
Jump Point Search
有众多的算法能够在代价一致的均匀网格中(uniform-cost grid maps)搜索最短线性路径,常见的有A*,Dijkstra’s等。而JPS算法相比其他算法,省略了众多点插入和点删除的操作,有选择性地扩展必要的节点。因此有着很高的搜索效率。
原论文:Online Graph Pruning for Pathfinding on Grid Maps by Daniel Harabor and Alban Grastien
符号和术语
- JPS算法工作于不定向的均匀网格地图中。
- 每一次直线运动的代价为1,对角运动的代价为 2 \sqrt{2} 2。
- 涉及不可穿越节点(障碍物)的运动是禁止的。
- y = x + k d ⃗ y=x+k\vec{d} y=x+kd 代表从 x x x 沿 d ⃗ \vec{d} d 方向运动 k k k 个单位可到达 y y y,当 d ⃗ \vec{d} d 为对角方向时,可分解为
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2304
2304

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









