







HM速率控制部分代码学习
基础知识跳过,博客参考:
https://blog.youkuaiyun.com/nb_vol_1/article/details/56022073
https://blog.youkuaiyun.com/nb_vol_1/article/details/55096464
总体而言,速率控制需要经过以下几步:
- 分配GOP级的目标比特数
- 分配Slice级的目标比特数
- 根据Slice级的目标比特数,确定Slice级的量化参数;根据Slice级的目标比特数,和已经编码的CTU,分配下一个CTU的比特数。
- 根据CTU的目标比特数,确定CTU的量化参数。
- 编码完一个CTU,更新CTU的量化参数。
- 编码完一个Slice,更新Slice的量化参数。
首先说明速率控制重要的类及功能:
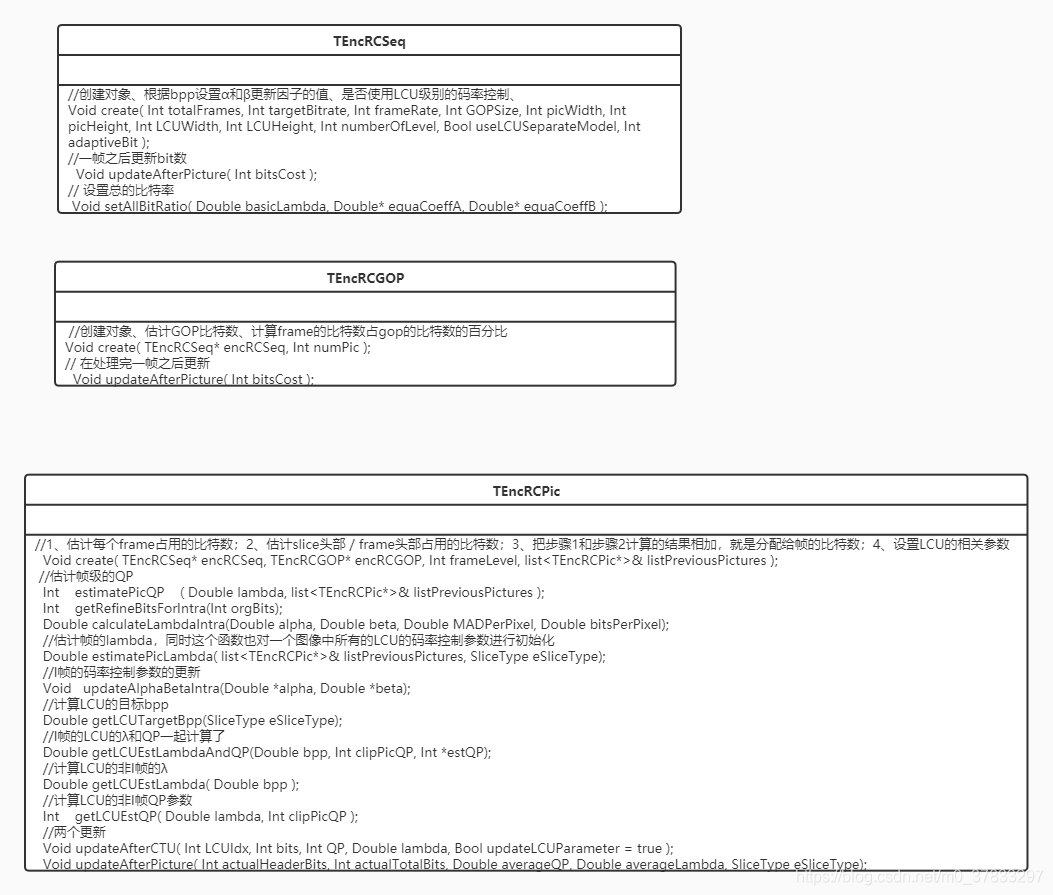
还有一个类 TEncRateCtrl管理上面三个类的对象,通过都名字能看明白。
码率控制在编码过程中哪些部分起作用。
下面这段代码是在compressGOP函数里面对帧级别的λ和QP的控制
if ( m_pcCfg->getUseRateCtrl() ) // TODO: does this work with multiple slices and slice-segments?
{
Int frameLevel = m_pcRateCtrl->getRCSeq()->getGOPID2Level( iGOPid );
if ( pcPic->getSlice(0)->getSliceType() == I_SLICE )
{
frameLevel = 0;
}
m_pcRateCtrl->initRCPic( frameLevel );
estimatedBits = m_pcRateCtrl->getRCPic()->getTargetBits()
Int sliceQP = m_pcCfg->getInitialQP();
if ( ( pcSlice->getPOC() == 0 && m_pcCfg->getInitialQP() > 0 ) || ( frameLevel == 0 && m_pcCfg->getForceIntraQP() ) ) // QP is specified
{
Int NumberBFrames = ( m_pcCfg->getGOPSize() - 1 );
Double dLambda_scale = 1.0 - Clip3( 0.0, 0.5, 0.05*(Double)NumberBFrames );
Double dQPFactor = 0.57*dLambda_scale;
Int SHIFT_QP = 12;
Int bitdepth_luma_qp_scale = 0;
Double qp_temp = (Double) sliceQP + bitdepth_luma_qp_scale - SHIFT_QP;
lambda = dQPFactor*pow( 2.0, qp_temp/3.0 );
}
else if ( frameLevel == 0 ) // intra case, but use the model
{
m_pcSliceEncoder->calCostSliceI(pcPic); // TODO: This only analyses the first slice segment - what about the others?
if ( m_pcCfg->getIntraPeriod() != 1 ) // do not refine allocated bits for all intra case
{
Int bits = m_pcRateCtrl->getRCSeq()->getLeftAverageBits();
bits = m_pcRateCtrl->getRCPic()->getRefineBitsForIntra( bits )
if ( bits < 200 )
{
bits = 200;
}
m_pcRateCtrl->getRCPic()->setTargetBits( bits );
}
list<TEncRCPic*> listPreviousPicture = m_pcRateCtrl->getPicList();
m_pcRateCtrl->getRCPic()->getLCUInitTargetBits();
lambda = m_pcRateCtrl->getRCPic()->estimatePicLambda( listPreviousPicture, pcSlice->getSliceType());
sliceQP = m_pcRateCtrl->getRCPic()->estimatePicQP( lambda, listPreviousPicture );
}
else // normal case
{
list<TEncRCPic*> listPreviousPicture = m_pcRateCtrl->getPicList();
lambda = m_pcRateCtrl->getRCPic()->estimatePicLambda( listPreviousPicture, pcSlice->getSliceType());
sliceQP = m_pcRateCtrl->getRCPic()->estimatePicQP( lambda, listPreviousPicture );
}
sliceQP = Clip3( -pcSlice->getSPS()->getQpBDOffset(CHANNEL_TYPE_LUMA), MAX_QP, sliceQP );
m_pcRateCtrl->getRCPic()->setPicEstQP( sliceQP );
m_pcSliceEncoder->resetQP( pcPic, sliceQP, lambda );
}
下面这段代码是CompressSlice函数里面对CTU的QP和λ的控制
if ( m_pcCfg->getUseRateCtrl() )
{
Int estQP = pcSlice->getSliceQp();
Double estLambda = -1.0;
Double bpp = -1.0;
if ( ( pcPic->getSlice( 0 )->getSliceType() == I_SLICE && m_pcCfg->getForceIntraQP() ) || !m_pcCfg->getLCULevelRC() )
{
estQP = pcSlice->getSliceQp();
}
else
{
bpp = m_pcRateCtrl->getRCPic()->getLCUTargetBpp(pcSlice->getSliceType());
if ( pcPic->getSlice( 0 )->getSliceType() == I_SLICE)
{
estLambda = m_pcRateCtrl->getRCPic()->getLCUEstLambdaAndQP(bpp, pcSlice->getSliceQp(), &estQP);
}
else
{
estLambda = m_pcRateCtrl->getRCPic()->getLCUEstLambda( bpp );
estQP = m_pcRateCtrl->getRCPic()->getLCUEstQP ( estLambda, pcSlice->getSliceQp() );
}
estQP = Clip3( -pcSlice->getSPS()->getQpBDOffset(CHANNEL_TYPE_LUMA), MAX_QP, estQP );
m_pcRdCost->setLambda(estLambda, pcSlice->getSPS()->getBitDepths());
}
m_pcRateCtrl->setRCQP( estQP );
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









