




 本文介绍了四种垃圾回收算法:标记-清除算法、复制算法、标记-整理算法和分代收集算法。详细解释了每种算法的工作原理及优缺点,并重点阐述了分代收集算法如何结合新生代和老年代的特点,提高垃圾回收效率。
本文介绍了四种垃圾回收算法:标记-清除算法、复制算法、标记-整理算法和分代收集算法。详细解释了每种算法的工作原理及优缺点,并重点阐述了分代收集算法如何结合新生代和老年代的特点,提高垃圾回收效率。
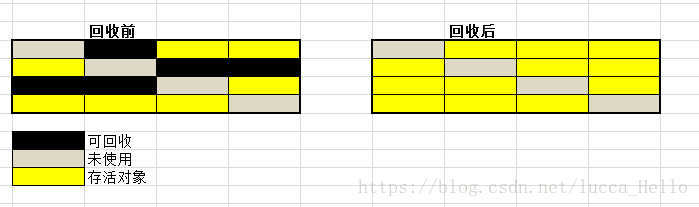
1 标记-清除算法
标记-清除算法是最基础的算法.算法分为"标记"和"清除"两个阶段:首先标记出所有需要被回收的对象,在标记完成后进行统一的回收.
它的主要不足之处:
a)标记和清除两个过程效率都不够高.
b)回收之后产生大量不连续的碎片空间,可能导致无法分配内存给较大的对象时,不得不提前出发额外的垃圾收集动作.
后续的算法都是基于这种思路并对其不足之处进行改进而得到的.
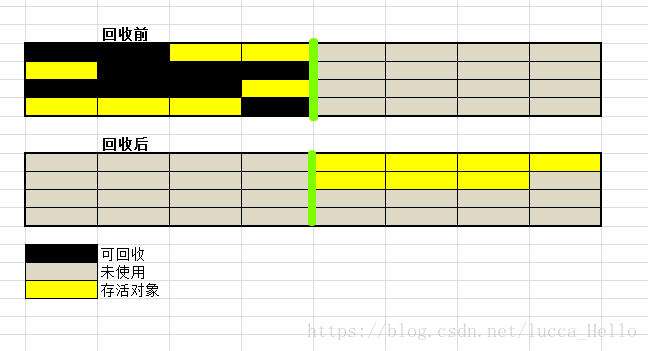
2 复制算法
为了解决效率问题,就出现了复制算法:将内存划分为两块区域,每次只是用一块区域,当这块内存用完的时候,就把还存活的对象复制到另一块区域,然后把用过的区域一次性清空.实现简单,运行高效.只是这种算法的代价是把可用内存缩小了一半.代价太高.
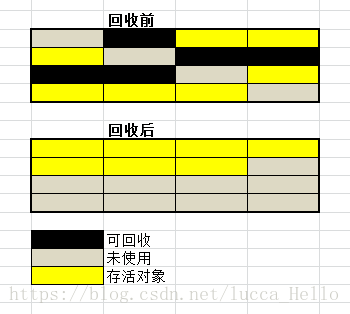
3 标记-整理算法
标记-整理算法的标记过程与标记清除算法的标记算法一样,知识会现将存活的对象向一段移动,然后直接清理掉端边界以外的内存.
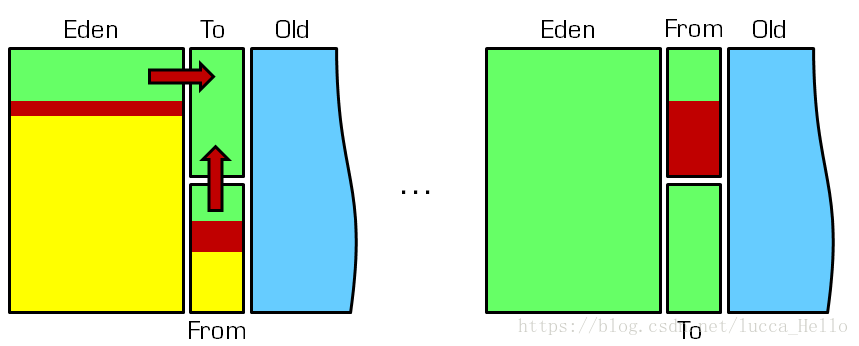
4 分代收集算法
分代收集算法:将java堆分为新生代和老年代.新生代使用复制算法,老年代使用标记-整理算法.
新生代的复制算法:
因为新生代中的对象98%是"朝生夕死"的,所以不需要按照1:1的比例来划分内存,而是将内存分为一块较大的Eden空间和两小块Survivor空间(from和to),每次使用到Eden和其中1个Survivor(from)空间.当回收时,将Eden和Survivor(from)的存活对象复制到另一块Survivor(to)空间,在清空Eden和Survivor(from)的内存,然后两个Survivor交换角色.每次回收幸存下来的对象年龄就会增加一次,当对象的年龄达到阈值之后,就会被移动到老年代.

















 1736
1736

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









