









目录:
- 1、边缘检测常用的算子canny算子、sobel算子和laplacian算子,尝试各自效果
- 2、霍夫变换,直线检测和圆检测
图像梯度
当用均值滤波器降低图像噪声时,会带来图像模糊的副作用。但是当我们要求清晰的图像时,就不能使用之前的图像变换来求像素值了。图像模糊是因为图像中物体的轮廓不明显,轮廓边缘灰度变化不强烈,层次感不强造成的,那么反过来考虑,轮廓边缘灰度变化明显些,层次感强些是不是图像就更清晰些呢。此时,我们可以使用图像的函数来定义图像,可以使用函数的导数(梯度)来表示的变化程度,这样既可以避免直接修改图像的像素值而引进新的模糊,还能更直观的显示出图像的变化。比如,在图像中物体的边缘的变化量比较大,物体中的变化量较小,因此可以用图像梯度来进行边缘检测以及一系列的图像处理。
一、边缘检测
边缘检测常用的算子有:高通滤波器(sobel算子,Scharr 算子,laplacian算子)和canny算子。
Sobel,Scharr 其实就是求一阶或二阶导数。Scharr 是对 Sobel(使用小的卷积核求解求解梯度角度时)的优化。Laplacian 是求二阶导数。
1. sobel算子和Scharr 算子
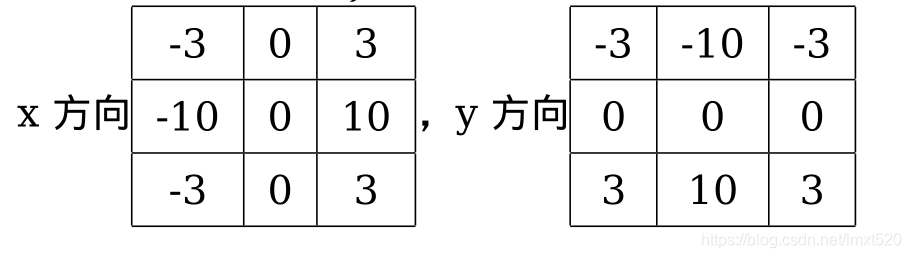
Sobel 算子是高斯平滑与微分操作的结合体,所以它的抗噪声能力很好。你可以设定求导的方向(xorder 或 yorder)。还可以设定使用的卷积核的大小(ksize)。如果 ksize=-1,会使用 3x3 的 Scharr 滤波器,它的的效果要比 3x3 的 Sobel 滤波器好(而且速度相同,所以在使用 3x3 滤波器时应该尽量使用 Scharr 滤波器)。3x3 的 Scharr 滤波器卷积核如下:
2. Laplacian算子
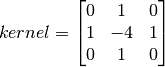
拉普拉斯算子可以使用二阶导数的形式定义,可假设其离散实现类似于二阶 Sobel 导数,事实上,OpenCV 在计算拉普拉斯算子时直接调用 Sobel 算子。计算公式如下:

拉普拉斯滤波器的卷积核为:
代码示例:
import numpy as np
import cv2
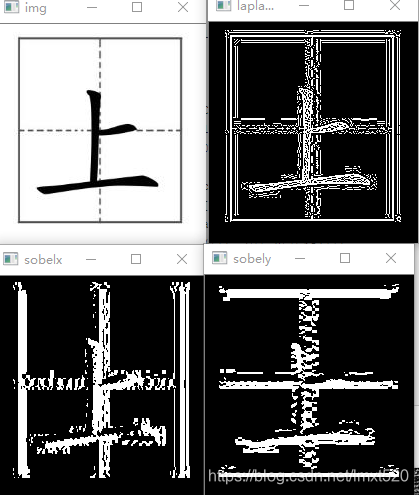
img = cv2.imread("6.jpg",0)
# 使用同为5*5的卷积核,cv2.CV_64F 为图像的深度,梯度为负数时使用cv_8U时会把边界丢失
laplacian = cv2.Laplacian(img,cv2.CV_64F)
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=5)
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=5)
cv2.imshow("img",img)
cv2.imshow("laplacian",laplacian)
cv2.imshow("sobelx",sobelx)
cv2.imshow("sobely",sobely)
3. Canny边缘检测
canny边缘检测时一种非常流行的边缘检测算法,是由很多步骤组合而成的。
3.1 噪声去除
因为边缘检测容易受到噪声的影响,所以需要使用高斯滤波或其他方法将噪声去除。
3.2计算图像梯度
对于平滑后的图像使用Sobel算子计算水平核竖直方向的图像梯度(方法如上),根据得到的两幅梯度图找到边界的梯度核方向。
3.3非极大值抑制
在获得梯度的方向和大小之后,应该对整幅图像做一个扫描,去除那些非边界上的点。对每一个像素进行检查,看这个点的梯度是不是周围具有相同梯度方向的点中最大的。
3.4滞后阈值
现在要确定那些边界才是真正的边界。这时我们需要设置两个阈值:minVal 和 maxVal。当图像的灰度梯度高于 maxVal 时被认为是真的边界,那些低于 minVal 的边界会被抛弃。如果介于两者之间的话,就要看这个点是否与某个被确定为真正的边界点相连,如果是就认为它也是边界点,如果不是就抛弃。
代码示例:
import cv2
img = cv2.imread("img.jpg",0)
# opencv中只需要一个方法就可以完成以上步骤,100,200为设置的阈值
edges = cv2.Canny(img,100,200)
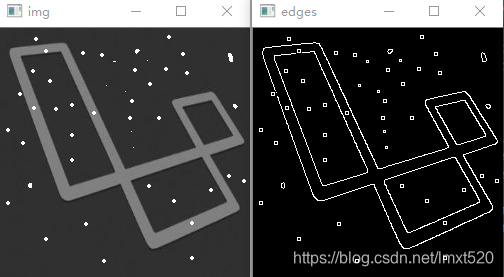
cv2.imshow("img",img)
cv2.imshow("edges",edges)
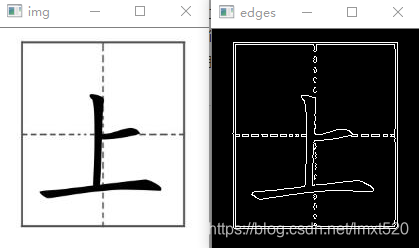
由于图像无噪声,所以效果较好。
再来一张有噪声的:
由于噪声点较大,效果中将噪声点误判为边界。
二、霍夫变换
霍夫变换在检测各种形状的的技术中非常流行,如果你要检测的形状可以用数学表达式写出,你就可以是使用霍夫变换检测它。及时要检测的形状存在一点破坏或者扭曲也可以使用。直线和圆都是可以用数学表达式表示出来的,所以图像中的直线和圆是可以用霍夫变换得到的。
1.霍夫直线变换
在opencv中,霍夫直线变换的函数为cv2.HoughLines(),其返回值为( ρ , θ \rho,\theta ρ,θ), ρ \rho ρ的单位为像素, θ \theta θ的单位是弧度。这个函数的第一个参数是一个二值化图像,所以在进行霍夫变换之前要首先进行二值化,或者进行Canny 边缘检测。第二和第三个值分别代表 ρ 和 θ 的精确度。第四个参数是阈值,只有累加其中的值高于阈值时才被认为是一条直线,也可以把它看成能检测到的直线的最短长度(以像素点为单位)。
代码示例:
# -*- coding:utf-8 -*-
import numpy as np
import cv2
img = cv2.imread("img.jpg")
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
edges = cv2.Canny(gray,10,100,apertureSize = 3)
lines = cv2.HoughLines(edges,1,np.pi/180,50)
for line in lines:
for rho,theta in line:
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 + 1000*(-b))
y1 = int(y0 + 1000*(a))
x2 = int(x0 - 1000*(-b))
y2 = int(y0 - 1000*(a))
cv2.line(img,(x1,y1),(x2,y2),(0,0,255),1)
cv2.imshow("img",img)
原图: 变换后:
变换后: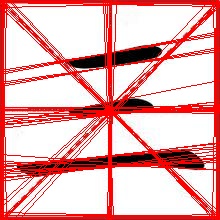
2.霍夫圆变换
圆形的数学表达式为 ( x − x 0 ) 2 + ( y − y 0 ) 2 = r 2 (x - x_0)^2 + (y - y_0)^2 = r^2 (x−x0)2+(y−y0)2=r2,其中( x 0 , y 0 x_0,y_0 x0,y0 )为圆心的坐标,r 为圆的直径。从这个等式中我们可以看出:一个圆环需要 3个参数来确定。所以进行圆环霍夫变换的累加器必须是 3 维的,这样的话效率就会很低。所以 OpenCV 用来一个比较巧妙的办法,霍夫梯度法,它可以使用边界的梯度信息。我们要使用的函数为 cv2.HoughCircles()。
代码示例:(引用自opencv教程)
import numpy as np
import cv2
img = cv2.imread("imgs.jpg",0)
img = cv2.medianBlur(img,5)
cimg = cv2.cvtColor(img,cv2.COLOR_GRAY2BGR)
circles = cv2.HoughCircles(img,cv2.HOUGH_GRADIENT,1,20,param1=50,param2=30,minRadius=0,maxRadius=0)
circles = np.uint16(np.around(circles))
for i in circles[0,:]:
#绘制圆
cv2.circle(cimg,(i[0],i[1]),i[2],(255,0,0),2)
#绘制圆心
cv2.circle(cimg,(i[0],i[1]),2,(0,0,255),3)
cv2. imshow('detected circles',cimg)
cv2. imwrite('circle.jpg',cimg)
原图: 圆变换:
圆变换: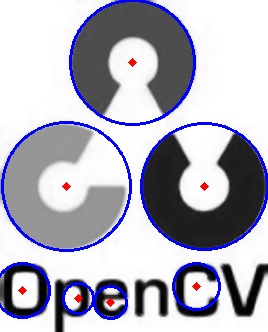
这里略偷懒一下,使用教程中的图片及代码来进行描述。在霍夫直线变换中阈值设置存在问题,导致效果不明显。
知其然知其所以然,这里只是提供了简单的opencv接口和原理,想要了解更多原理,需要更加深入的研究。
参考:《数字图像处理》第三版
OpenCV-Python 中文教程----段力辉


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









