



 本文介绍Xtrabackup 2.4.13及以后版本如何支持innodb_buffer_pool数据的备份与恢复,这对于大内存MYSQL的快速恢复至关重要。文章详细解释了--dump-innodb-buffer-pool参数的正确使用方法,以及如何确保innodb_buffer_pool_dump_now和innodb_buffer_pool_dump_pct参数配置正确。
本文介绍Xtrabackup 2.4.13及以后版本如何支持innodb_buffer_pool数据的备份与恢复,这对于大内存MYSQL的快速恢复至关重要。文章详细解释了--dump-innodb-buffer-pool参数的正确使用方法,以及如何确保innodb_buffer_pool_dump_now和innodb_buffer_pool_dump_pct参数配置正确。

众所周知Xtrabackup 是mysql 中重要的备份工具,而数据库的备份中,尤其大内存的 MYSQL 备份中,都有一个问题的存在就是 innodb_buffer_pool 的存在。备份后的MYSQL 在恢复后,一般innodb_buffer_pool 的数据都不会再恢复的数据库上出现,越大的内存和繁忙的MYSQL 在数据恢复后,就会有一个缓冲期,需要预热一段时间。一般来说我们都是希望备份的数据恢复后能带有内存中的数据。其实MYSQL 本身是有这个设置的,就是在关机和开机的时候,将 innodb buffer pool 写入文件,在开始的时候读取这些文件,装载到内存中。
但到备份就不大现实了,终不能为了这个功能,把数据库关机,在备份吧。
自从 XTRABACKUP 2.4.13后,xtrabackup 软件就可以支持将innodb_buffer_pool 的数据备份到备份中并且在恢复的时候装入到内存。
这项功能在对大内存和急需恢复后使用的MYSQL是十分有意义的,试想你恢复完一台128G的MYSQL 后,查询并没有预热,在此期间的查询会大量开始走磁盘,这当然不是一个专业的做法,并且在这段时间很可能出现一些你不想遇到的问题。
所以 XTRABACKUP 提供了再备份的时候,直接将innodb_buffer_pool 进行一个备份,并且在恢复的时候,将其恢复到MYSQL中,等恢复的MYSQL 启动后,你的innodb_buffer_pool 会和源机具有一样的 innodb_buffer_pool 来应对马上到来的大量查询。
我们使用下面的命令就可以进行相关的备份
xtrabackup --defaults-file=/etc/my.cnf --user=root --password='password' --socket=/data/mysql/mysql.sock --backup --dump-innodb-buffer-pool --target-dir=/data/backup/2019-08-31
添加了 --dump-innodb-buffer-pool 但有些同学却抱怨这是一个垃圾的无效的命令,使用这条命令恢复后的MYSQL 并没有和预想的一样,有了 innodb_buffer_pool 的数据。
到底是是命令有问题,还是.......
其实这个功能是MYSQL 5.7 后的本身提供的功能,XTRABACKUP 仅仅是将这个功能在XTRABACKUP 进行了体现而已。
到底是什么原因造成的这里卖个关子
我上面的备份怎么证明我备份了innodb_buffer_pool
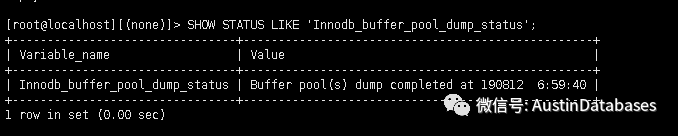
SHOW STATUS LIKE 'Innodb_buffer_pool_dump_status';
通过上面的命令就可以展现你最后一次 dump buffer pool 的时间
上面可以证明我的确在我早上 6:59的时候,在备份的期间,将buffer_pool dump下来了。
所以可以证明那个参数是有效的,也可以通过查看你恢复后的数据库的bufferpooldata 来正你恢复了数据
OK 到这里为止,可以证明这个参数是有效的,到底什么原因会导致有些同学的命令无效。
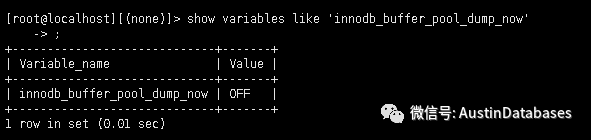
你可以尝试打开下面的参数
SET GLOBAL innodb_buffer_pool_dump_now=ON;
默认此参数是关闭的状态
同时也可以设置到备份的时候要download 多少的 buffer_pool
[mysqld]
innodb_buffer_pool_dump_pct=40所以如果你备份的时候不能进行innodb_buffer_pool download 的原因主要是你的那个在线download buffer_pool 的参数是否是打开的状态。
其实有些时候,某些事情的操作看似不成功莫名其妙,其实如果往深挖,往下看,大多是能找到问题的所在的。


















 3192
3192

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









