






 本文探讨了边缘保留滤波算法(EPF),包括高斯双边模糊、Meanshift均值迁移模糊和局部均方差模糊等。重点介绍了高斯双边模糊算法的原理,及其与高斯滤波的区别。通过实例代码展示了如何使用OpenCV实现高斯双边模糊。
本文探讨了边缘保留滤波算法(EPF),包括高斯双边模糊、Meanshift均值迁移模糊和局部均方差模糊等。重点介绍了高斯双边模糊算法的原理,及其与高斯滤波的区别。通过实例代码展示了如何使用OpenCV实现高斯双边模糊。
26 边缘保留滤波算法 – 高斯双边模糊
代码
import cv2 as cv
import numpy as np
src = cv.imread("../images/example.png")
cv.namedWindow("input", cv.WINDOW_AUTOSIZE)
cv.imshow("input", src)
h, w = src.shape[:2]
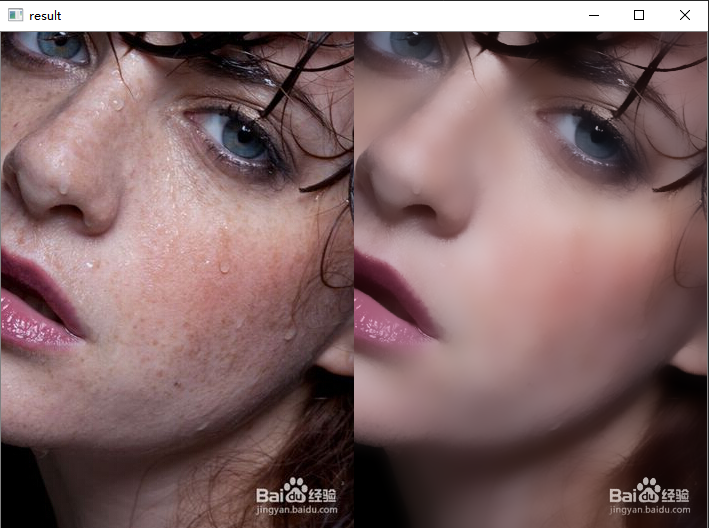
dst = cv.bilateralFilter(src, 0, 100, 10)
result = np.zeros([h, w*2, 3], dtype=src.dtype)
result[0:h,0:w,:] = src
result[0:h,w:2*w,:] = dst
cv.imshow("result", result)
cv.waitKey(0)
cv.destroyAllWindows()
实验结果
解释
无论是均值还是高斯都是属于模糊卷积,它们都有一个共同的特点就是模糊之后图像的边缘信息不复存在,受到了破坏。通过卷积处理实现图像模糊的同时对图像边缘不会造成破坏,滤波之后的输出完整的保存了图像整体边缘(轮廓)信息,我们称这类滤波算法为边缘保留滤波算法(EPF)。最常见的边缘保留滤波算法有以下几种
- 高斯双边模糊
- Meanshift均值迁移模糊
- 局部均方差模糊
- OpenCV中对边缘保留滤波还有一个专门的API
与高斯滤波的区别
两者的区别在于,高斯滤波在滤波时会将图像中各个颜色区域的边缘同区域本身一起模糊掉,而高斯双边滤波则是对各个区域的交界边缘有所保留。
-
对于高斯滤波来说有两个参数
window_size,即滤波窗口越大,图像越模糊sigma越大,图像越模糊
-
而高斯双边滤波则有三个参数
window_size窗口越大,滤波程度越大sigmaColor越大,交界处即边缘越模糊sigmaSpace越大,即颜色平均的地方越模糊
所有内容均来源于贾志刚老师的知识星球——OpenCV研习社,本文为个人整理学习,已获得贾老师授权,有兴趣、有能力的可以加入贾老师的知识星球进行深入学习。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









