



B站 :道传科技上位机 观看教程
一、专业术语
相机对比度:相机对比度是指图像中明暗区域最亮部分(白)与最暗部分(黑)之间的亮度差异程度,差异越大对比度越高,反之则越低。
贪婪( Greediness ): Halcon中的Greediness参数是find_shape_model函数的一个关键参数,用于控制搜索过程的贪婪度,即搜索策略的激进程度。
高精度需求场景:若模板与搜索图像相似度高且无复杂干扰,可适当降低Greediness以提高匹配准确性。
实时性优先场景:当需要快速定位目标且对匹配完整性要求不高时,可提高Greediness以加快搜索速度。
“贪婪”的启发式搜索(0:安全但慢;1:快速但比赛可能会错过)。
亚像素(SubPixel) :
Shape:SubPixel参数有很多值可以设置,不同的值可以实现不同的匹配精度和效果。其中none表示只提取像素精度的角度和位置,interpolation表示通过多项式插值得到亚像素精度的角度和位置,least_squares表示通过最小二乘法最小化轮廓距离得到亚像素精度的角度和位置,它们的精度依次增高。
Ncc: SubPixel参数有很多值可以设置,不同的值可以实现不同的匹配精度和效果。false true 他们的精度依次提高
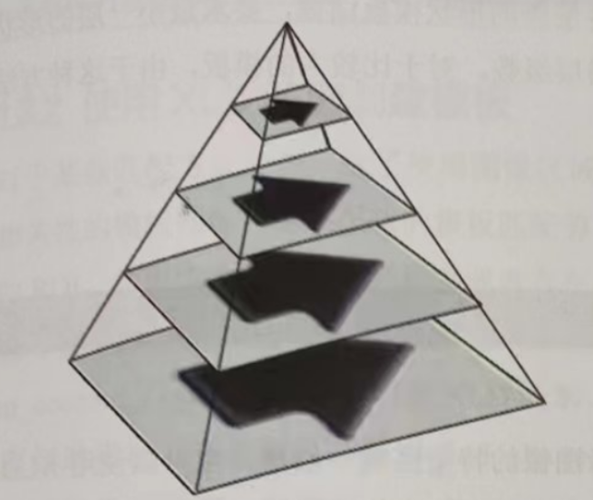
二、金字塔
金字塔:金字塔在图像处理中就像是用不同倍数的放大镜观察图片,Halcon用它来大幅提高匹配和检测的效率。
工作原理:先看缩小版的整幅画(找到大概区域),然后放大一点看候选区,最后在原图精确位置
金字塔为什么能加速?
顶层搜索:在极小图像上计算,1个像素相当于原图16x16区域
逐层传递:只把可能的位置传到下一层
最终计算量:比直接搜索原图减少50-90%
设置建议:高对比度目标:3-5层(如金属零件);低对比度目标:1-3层(如医疗图像); 超大图像:6-8层(如卫星图像)

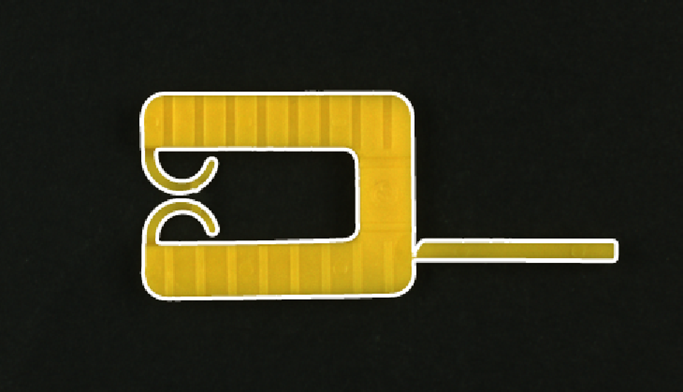
三、形状匹配
形状匹配(Shape-Based Matching)
算法原理
基于目标的边缘或轮廓特征,使用金字塔分层搜索和相似性度量(如边缘方向差)。
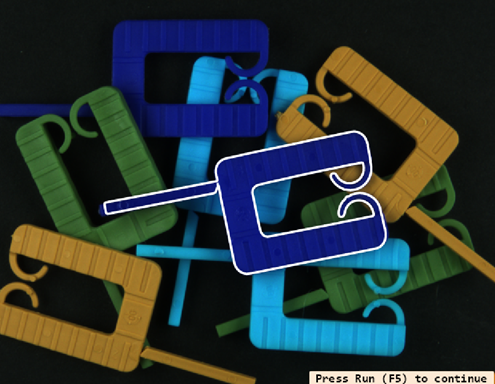
应用场景
高精度定位、存在部分遮挡或光照变化的场景(如机械臂抓取)。
优点
抗光照变化和部分遮挡;支持旋转、缩放和多目标检测。
缺点
需要清晰的边缘特征;对模糊或低对比度图像效果差。
create_shape_model(TemplateImage, 'auto', 0, 0, 'auto', 'auto', 'use_polarity', 'auto', &ModelID);
find_shape_model(SearchImage, ModelID, 0, 0, 0.8, 1, 0.5, 'least_squares', 0, 0.9, &Row, &Column, &Angle, &Score);
四、组件匹配
组件匹配(create_component_model/find_component_model)
设计:
将目标分解为多个关键组件;每个组件独立匹配后组合评分;支持组件间弹性位移
组件配置策略:
选择高对比度区域作为组件;组件数量控制在3-5个;设置合理的组件最小尺寸(MinSize)
create_component_model(ValveTemplate, ['leaflet1','leaflet2','annulus'], 10, 30, 50, ModelID)
find_component_model(USImage, ModelID, 0.7, -0.2, 0.4, 0.6, 3, 0.3, 'true', 'deformable', Rows, Cols, Angles, Scores, CompIndices)

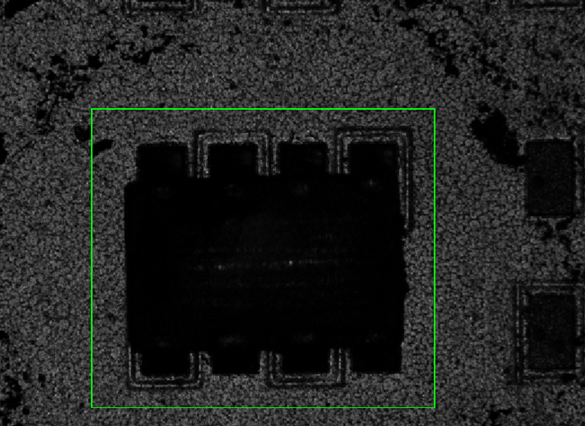
五、灰度匹配
归一化互相关匹配(create_ncc_model)
独特价值:
对线性光照变化免疫
适合低对比度场景
支持任意旋转角度
create_ncc_model(AlignmentMark, 'auto', 0, rad(360), 'auto', 'use_polarity', ModelID)
find_ncc_model(WaferImage, ModelID, 0, rad(360), 0.8, 1, 0.5, 'true', 0, Rows, Cols, Angles, Scores)
六、形状和灰度匹配比较
灰度匹配
场景一:纹理丰富的物体识别
适用于纹理丰富、形状变化不大的物体识别,如识别不同光照条件下的同一物体。
例如,在监控系统中识别同一车辆或行人,即使它们的位置或方向发生变化。
场景二:图像拼接和图像融合
在图像拼接和融合过程中,灰度匹配可以用于找到重叠区域,以便将不同视角的图像无缝连接。
场景三:基于内容的图像检索
在图像数据库中检索与查询图像内容相似的图像,不考虑物体的具体形状,只关注图像的灰度信息和纹理。
形状匹配
场景一:精确形状识别
适用于需要精确识别物体形状的应用,如工业检测中的零件形状验证、机器人抓取特定形状的物体等。
例如,在制造业中识别装配线上特定形状的零件。
场景二:轮廓分析
在需要对物体的轮廓进行分析的场景中,如道路标志识别、地形分析等。
例如,在地图绘制或地形分析中识别河流、道路等自然或人造边界。
场景三:模式识别和分类
在需要对物体进行分类或模式识别的应用中,形状特征可以提供关键信息。
例如,在医学图像中识别不同类型的细胞或组织结构。
优缺点比较
灰度匹配的优点在于其对纹理和光照变化的鲁棒性较好,适用于多种环境条件。但其缺点是可能对形状变化敏感,特别是在形状发生较大变化时。
形状匹配则对形状的变化更为敏感,能够提供关于物体结构的详细信息,但可能在纹理不丰富或光照条件多变的环境下表现不佳。
(注意:在去单一产品,存在叠料的情况下,需要使用灰度匹配)


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









