




1 实验目的
了解HSV色域和识别颜色,跟踪颜色。
2 实验设备
安装了python和pychrm的电脑一台。
3 实验内容
包含图片的导入、色域检测、识别颜色、跟踪颜色、显示图片。
4 实验原理
其实摄像头的色域跟踪也是和图像是一样的,只不过多了while循环,不断获取摄像头的每一帧进行掩模提取颜色。前面已经学会了如何打开摄像头,那做这个实验一个很容易。
色域检测重要的一步是把图像转为HSV图像,由于HSV的颜色空间比BGR空间更容易表示特定的颜色,故我们将BGR空间转换成HSV,一般以HSV为颜色检测和识别:H--色调(红-绿-蓝);S--饱和度(颜色深浅);V-亮度(颜色亮暗)。
首先我们要获取某个颜色就要设定一个范围的阈值,二值化处理能够将我们需要的颜色置0,其他颜色置为255,才能筛选出目标颜色的掩模图像。选择正确的阈值是阈值分割的关键。
要想实现颜色的识别,我们要打开摄像头,读取捕获的图像。将图像的颜色通道转化为HSV,然后设置HSV的阀值到指定的颜色范围。使用inRange函数将图像转变为二值图,其中黄色部分显示为白色,其余为黑色,然后获取到指定颜色范围的物体,第一步是大体分离出主体部分,满足条件的颜色区域会被标记为白色(255)其余为黑色(0)。
在inRange二值化处理后我们要进行腐蚀膨胀操作消除其他干扰,erode函数实现腐蚀操作,dilate函数实现膨胀操作,先腐蚀后膨胀可以去掉小的对象,假设对象是前景色,背景是黑色。
bitwise_and函数实现对目标提取,这是一个‘与’操作,用二值化后的掩模图像进行与操作,找出阈值范围内的颜色区域,找到了颜色区域我们就要找出轮廓将其画制出来。利用Rectangle函数绘制轮廓。
5 实验步骤
打开pycharm。
我们右击相应的文件目录,选择new--->点击Python File,然后输入新建的文件名,点击确定,相应的.py文件就建好了,可以进行编写代码了。
VideoCaptur打开摄像头
ipoert cv2
capture = cv2.VideoCapture(0)
获取摄像头的每一帧。
while True:
ret,frame = capture.read()
将每一帧转成HSV图像。
hsv = cv2.cvtColor(frame,cv2.COLOR_BGR2HSV)
设置阈值。
lower_hsv = np.array([35,43,45])
upper_hsv = np.array([77,255,255])#范围(绿色)
二值化,将在两个阈值内的像素值设置为白色(255),而不在阈值区间内的像素值设置为黑色(0)。
mask = cv2.inRange(hsv, lower_hsv, upper_hsv)
够造卷积核。
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))
腐蚀膨胀操作。
##腐蚀操作
erosion = cv2.erode(mask, kernel, iterations=1)
##膨胀操作
dilate = cv2.dilate(erosion, kernel, iterations=1)
与操作提取特定颜色。
dst = cv2.bitwise_and(frame,frame,mask=dilate)
显示图像。
cv2.imshow('video',frame)
cv2.imshow('mask',mask)
cv2.imshow('dst',dst)
c = cv2.waitKey(40)
if c ==27:
break
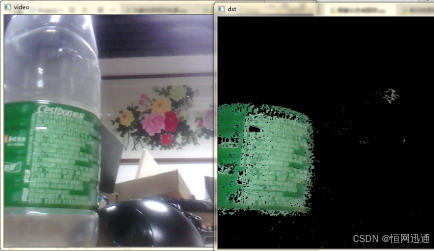
原图和效果图:

















 2374
2374

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









