







 本文介绍了11款国内外的Linux服务器管理面板,包括单机版和云端版,如宝塔、旗鱼云梯等,分析了它们的优缺点。单机版如宝塔面板操作简便但收费较高,而云端版如旗鱼云梯以安全和轻量化著称,适合多服务器管理。文章提供视频对比,帮助用户选择合适的面板。
本文介绍了11款国内外的Linux服务器管理面板,包括单机版和云端版,如宝塔、旗鱼云梯等,分析了它们的优缺点。单机版如宝塔面板操作简便但收费较高,而云端版如旗鱼云梯以安全和轻量化著称,适合多服务器管理。文章提供视频对比,帮助用户选择合适的面板。
在linux服务器运维管理方面linux面板可是举足轻重的地位,因为它具有方便管理服务器的优势,尤其是界面化的操作,适合大部分高中低的用户体验.
这里要介绍的就是现在我用过的国内外的linux面板,介绍下这11个厂家linux面板的优缺点,方便用户在需要使用linux面板时有一个对比的认识,让你最快使用到评比的好面板.

首先普及一下,linux面板现在分单机版和云端版两种,第一种是单机版linux面板,第二种是云端linux面板.

第一种单机版,就是把面板和探针安装到服务器上,自己的服务器相当于运行了一个IP网站,这样使用时需要通过IP和端口地址访问,对于最早的运维管理,最早的技术只能做成这样,接触的代表就是国内的宝塔面板,其他古老的WDCP和APPNODE,宝塔面板在抄袭这些老前辈上,累积了很多用户,所以国内单机版linux面板,宝塔用户比较多.
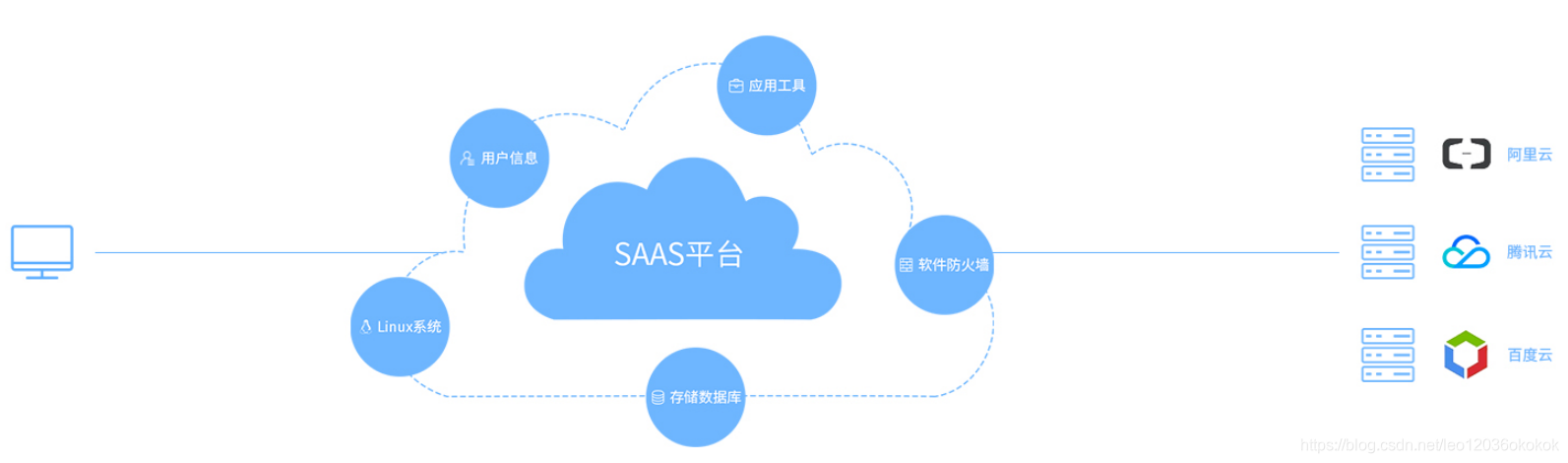
第二种就是云端linux面板,原理就是服务器安装一个探针程序,探针和云端管理网站通过加密通道连接,用户访问使用的界面都在云端上,用户的服务器上没有任何页面和多余程序消耗内存,由于避免的架设不安全的IP网站,服务器本身更安全.云端linux面板的代表就是旗鱼云梯,采用云端架构,让管理服务器的建站和安全防护更轻量化,平台采用SAAS化结构.

既然是对比推荐,我这里只说使用感觉和对产品的介绍,由于篇幅过长,我做了一期基本的linux面板对比视频,可点击查看超链接:
先说单机版linux面板:
1.宝塔 网站 www.bt.cn
宝塔面板有Linux系统面板,可以安装LNMP、LAMP等环境(编译安装是假的),包括简单的备份、监控、定时计划。用户使用反馈单机版的问题都有。没有针对新的SEO需求,做插件和功能调整.收费比较贵,基本一个waf防火墙一个月就几十元,买上几个插件基本一个服务器就几百了.

- WDCP 网址:wdlinux.cn/wdcp
WDCP面板,比较古老的面板,原因是这款面板五年搁置没有任何更新,作者改成付费模式必须会员才管你。且目前功能上基本不更新,没有针对新的SEO需求,做插件和功能调整.
安装面板是最苦逼的安装LAMP和LNMP版本,基本眼安装42分钟以上.收费现在基本是会员制,基本随便一个服务就是上千几千元.
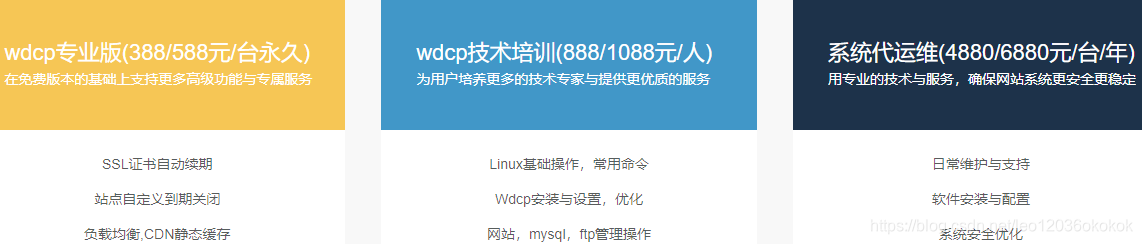
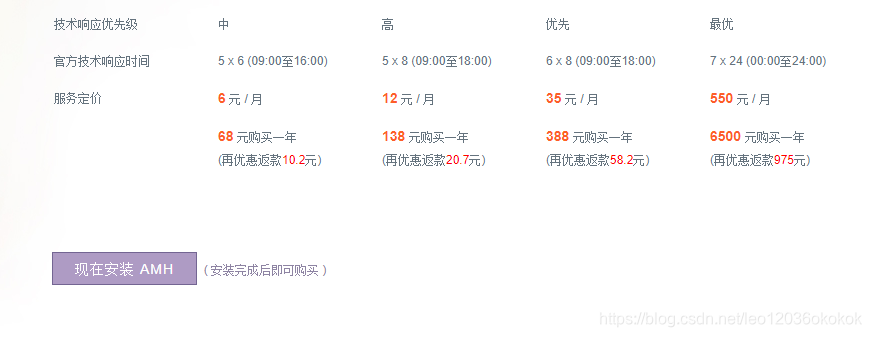
- AMH 网站:amh.sh
AMH属于WDCP之后的一个产品,现在的市场属于一半了,由于使用方式方式和操作,比较不符合现在的操作方式,用户群受到压缩,基本的建站功能外,没有很大的创新,收费也是采用会员制,价格也不便宜.
4.APPNODE 网站: www.appnode.com
AppNode面板的前身是VPSMate,是非常古老的面板,后来由于各种原因不再更新。这个面板劝大家,不是专业的运维人员,不要使用,因为里面的逻辑够你晕的,现在他们的收费室会员制,按月收费模式,价格怎么说呢,不便宜不推荐用了.

这里其他面板我简单说一下,因为这些大部分人都没法使用,都是命令下居多,不推荐普通用户使用,因为首先他们不更新了,第二是使用逻辑复杂,很容易出现bug问题.
5.OneInStack面板,网址:oneinstack.com.
6.LAMP面板,网址:lamp.sh
7.LNMP面板,网址:lnmp.org
8.LuManager面板,网址:www.zijidelu.org
9.BrainyCP 面板,网址:BrainyCP .com
10.小助手linux面板,网址:www.zzidc.com/kyhelperWEB
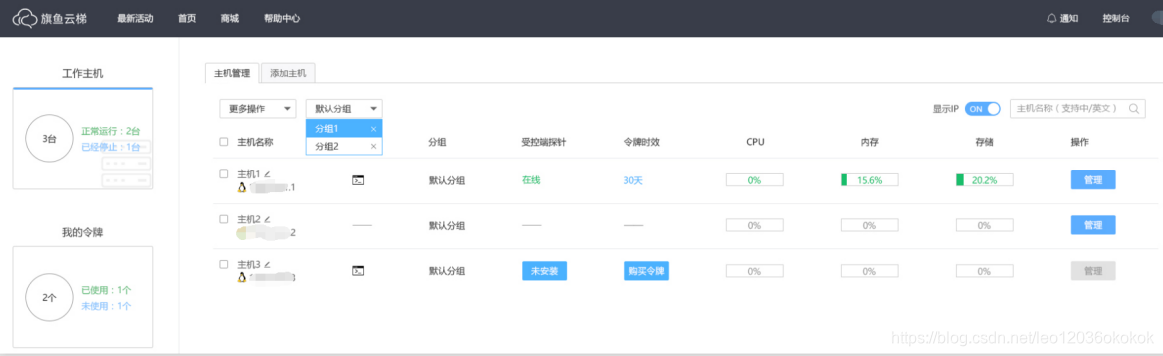
接下来就是云端面板:旗鱼云梯 网址:www.marlinos.com

旗鱼云梯是是新的SAAS化结构云端linux面板,不同于国内其他厂商linux面板,它把运维管理服务器,在云端完成,服务器只需要安装加密探针,不需要安装其他页面多余端口等,耗费服务器资源的东西,通过云端运维服务器,属于最新的解决办法。
采用的是批量化,云端化,安全化管理模式,比较推荐这种模式.适配了很多SEO插件,404,301,robots,sitemap等功能.
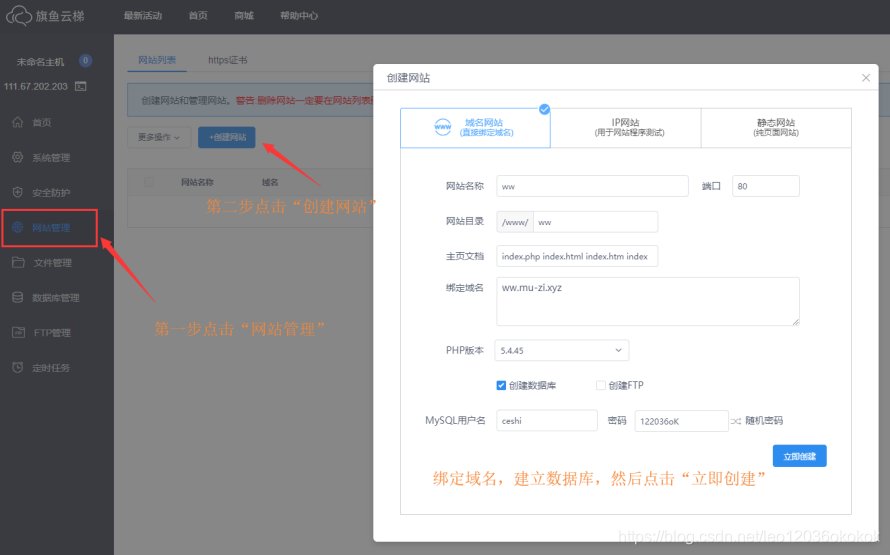
建站和管理方式比较安全,适合用户多方面的管理方式.旗鱼云梯有很多安全方面的设置,免费的waf防火墙,本地防火墙等,采用使用几天服务器就买几个令牌方式,价格很便宜一个月9块钱,一年才100来元.

总结:单机版有单机版的优势,比如就是想使用单机版就一台服务器,或就想花钱用,那就单机版,云端linux面板就是批量化操作管理,比较适合多台服务器用户,或需要安全更高的方式管理服务器的用户.

















 308
308

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









