



使用新型夹闭装置和4S改良Roeder 滑结进行大缺损的内镜下闭合
Shuchen Ge
上海理工大学医疗器械与食品工程学院,中国上海 200093;明尼苏达大学厄尔·E·贝肯医疗设备中心,明尼阿波利斯,明尼苏达州 55455
Liaoyuan Ai
上海理工大学医疗器械与食品工程学院,中国上海 200093
亚瑟·G·埃尔德曼
明尼苏达大学厄尔·E·巴肯医疗设备中心,明尼阿波利斯,明尼苏达州 55455
宋成利¹
上海理工大学医疗器械与食品工程学院,上海 200093,中国 电子邮件:csong@usst.edu.cn
内镜下闭合是胃肠道(GI)手术中的一项重要操作,但由于缺乏合适的器械,目前对大缺损进行内镜下闭合仍然较为困难。此前,我们开发了一种具有多发功能并配备独立夹钳的内镜夹闭装置。本研究旨在利用该装置结合4S改良罗德结(4SMR)滑结提出一种新的闭合方法。通过在一次插入过程中部署两个夹子至4SMR滑结上,对离体猪胃5cm全层线性缺损从中心位置进行闭合,以验证该闭合方法的可行性。同时评估夹子‐滑结闭合及滑结在不同张紧力下的机械强度。具体而言,通过平均峰值断裂力来验证4SMR滑结的机械强度,分别使用2.5、5、7.5和10 N的张紧力进行测试(每组n=20),实验结果表明,夹子‐滑结闭合可承受6.3±5.6 N的牵拉力。张紧力对滑结的机械强度有显著影响,其平均峰值力(对应张紧力)分别为7.16±6.5、16.3±9.3、18.9±10.4和24.2±12.0 N。所提出的闭合方法适用于大缺损的处理,高于5牛顿的张紧力有助于确保4SMR滑结具备更高的强度。[DOI: 10.1115/1.4039753]
1 引言
内镜下黏膜切除术和内镜下黏膜下层剥离术作为胃肠道早期癌症和息肉的内镜治疗手段,已得到广泛认可,与传统开放手术相比,其造成的创伤更小,恢复时间更短,住院时间也更短[1,2]。同时,这些手术后的闭合操作在技术上和操作上均较为复杂,且闭合不充分可能导致术后并发症。因此,这对内镜止血/闭合器械和方法提出了新的要求。
经腔道夹钳(TTSC)因其使用方便且效果可靠,已广泛应用于胃肠道止血和小缺损的闭合。然而,当穿孔尺寸大于2cm时,TTSC在实际应用中存在不足,因其开口宽度有限且维持强度较小。因此,黏膜闭合的效果存疑,可能容易导致术后不良事件[3–6]。在这方面,尽管腔外夹等腔外装置以及缝合装置由于能够实现组织全层对合而提供更强的闭合效果,但与TTSC相比,它们价格昂贵、体积较大且操作困难[7–10]。
为了改善夹子在大缺损中的应用效果,松田等人描述了一种利用双通道内镜结合内镜可拆卸套索和两个金属夹子关闭内镜下黏膜切除术后大范围黏膜缺损的技术[11]。该方法可能适用于结直肠等狭窄腔道,因为在这些部位缺损边缘通常较为接近。已有使用单通道内镜通过“八环法”和“环夹法”成功闭合缺损的报道,但需要使用目前市场上尚不可得的特殊装置[12,13]。最近,西泽等人提出了一种创新性内镜缝合技术,在内镜下黏膜下剥离术后使用滑结线和夹子配合单通道内镜进行操作[14,15]。该技术不仅能缩短手术时间,而且更具可行性,因其无需任何特殊装置和双通道内镜。需要注意的是,滑结的机械强度欠佳,当受到外部牵拉时可能无法长期维持结扎状态。因此,该方法在临床应用中可能存在一定局限性。
我们设计了一种新型内镜夹闭装置,并报道了其初步的体外实验结果[16,17]。本文介绍了一种利用该装置结合4S改良罗德结(4SMR)滑结的新闭合方法,可实现对大缺损的快速闭合。此外,还研究了闭合部位及4SMR滑结的机械强度。
2 材料与方法
2.1 装置设计与原理
该新型内镜夹闭装置能够在单次插入时释放两个夹子,并配备有一个独立夹钳(图1(a)和2)。位于弹匣远端的夹钳可多次重新打开,以调节组织的对合程度,其张开角度为110度。夹钳内表面的凹槽在夹钳闭合后可作为推进并锁定夹子的导向(图2(b)和2(c))。夹子呈轴对称U形,线性排列于弹匣中(图1(b)和2)。相较于先前原型[16,17],进行了两项改进:首先,我们缩短了弹匣,现仅装载两个夹子而非四个。如此一来,整个装置的灵活性得以提升。
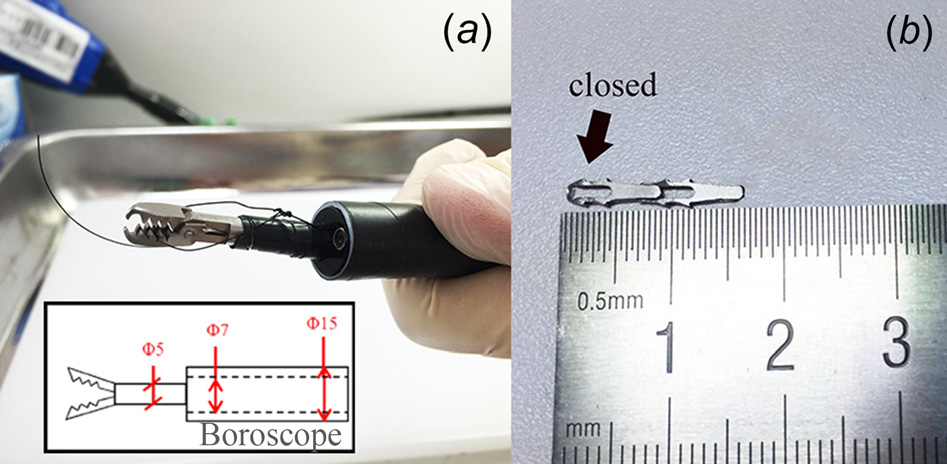
可以增加力度,通常使用两个夹子配合滑结即可完成对撕裂伤的闭合。其次,夹子的形状已改为具有四个带倒钩的鳍,以便在夹子从组织上脱落时实现更好的固定。
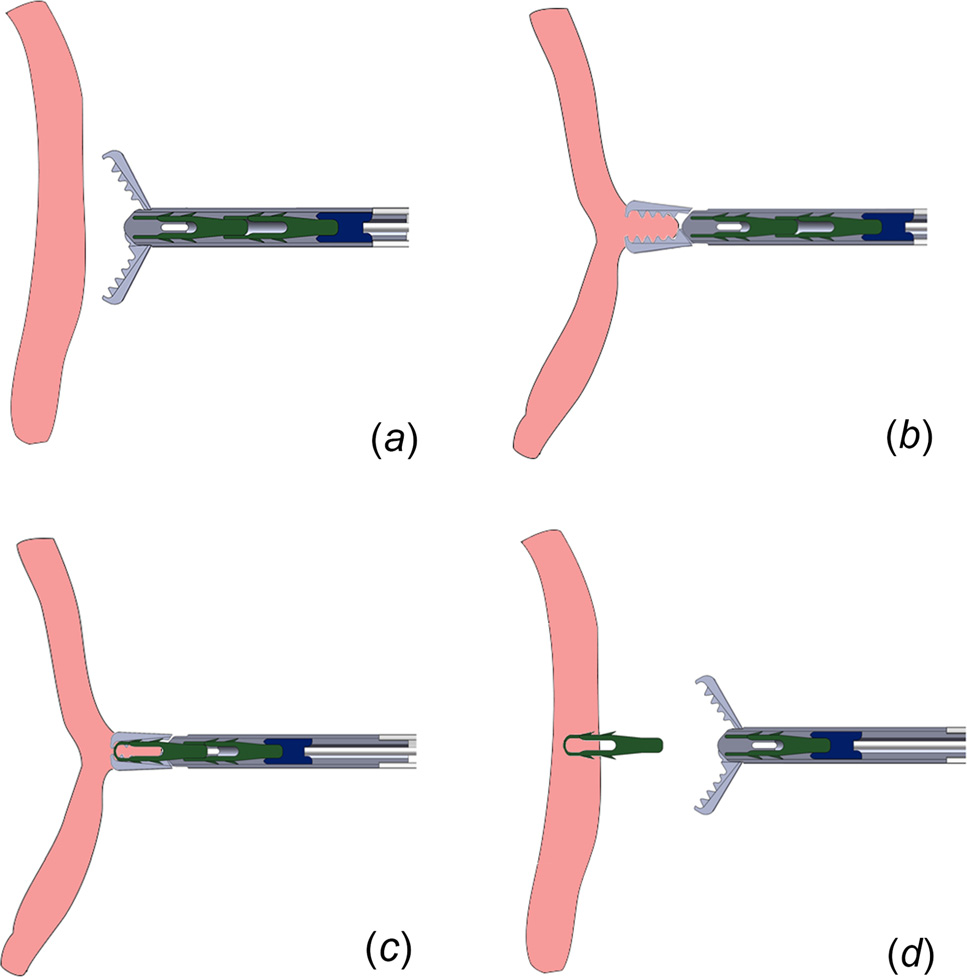
关于夹子释放,第一步是将钳夹垂直打开以对准组织(图2(a))。然后关闭钳夹以抓取目标组织,将其压入弹匣中(图2(b))。此时,钳夹可重新打开以调整夹闭装置的方向,确保夹子释放时位置理想。随后,将夹子推进至组织上,每个夹子的两个细臂随推进向内弯曲,并锚定在黏膜下层下方(图2(c))。最后,释放钳夹以完成部署(图2(d))。
2.2 4S改良Roeder结扎法的描述
打结方法如图3所示。环的自由端用白色表示,固定端用黑色表示。第一步是打一个单结(图3(a))。然后,将缝线自由端在环的顶部缠绕四次(图3(b))。下一步是将缝线自由端从前到后绕过环的近端支,形成一个半结(图3(c))。第四步是通过将缝线自由端从后到前穿过来形成一个方结(图3(d))。最后一步是向操作者方向同时牵拉自由端和固定端,使结变平(图3(e))。

2.3 使用夹闭装置和4S改良Roeder结进行内镜下闭合
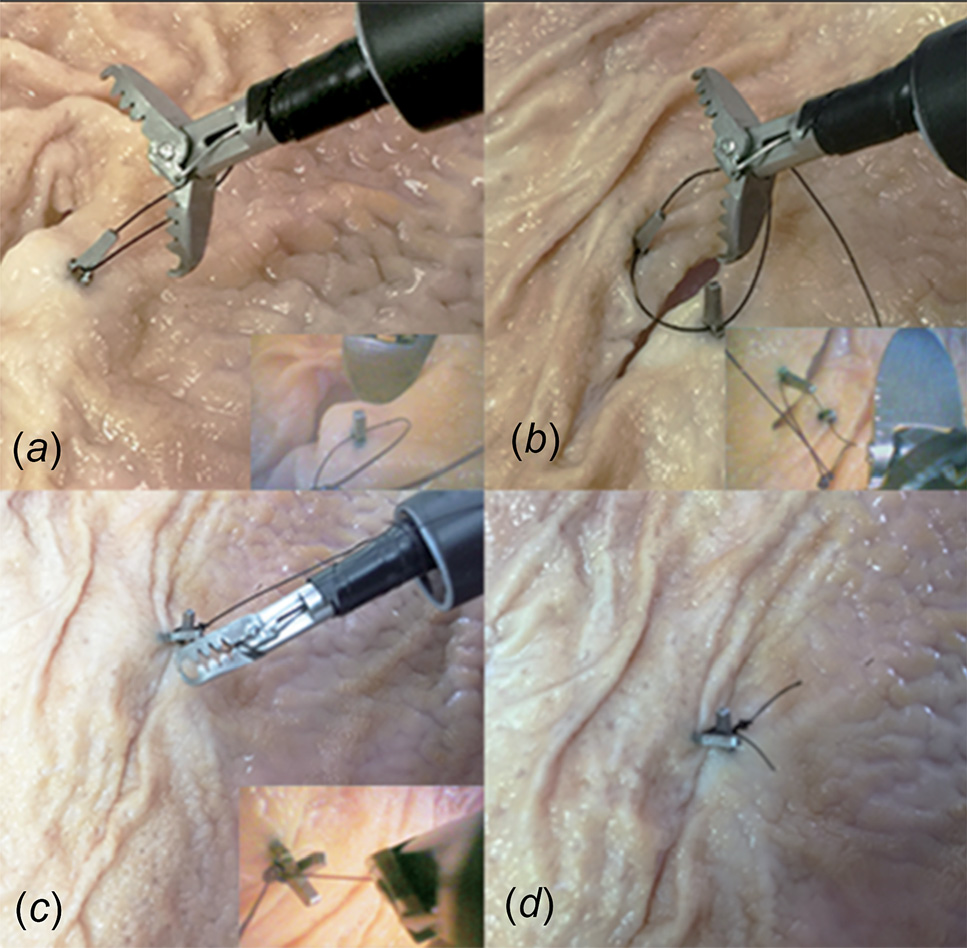
简而言之,操作者抓住滑结的自由端;同时,在装置通过内窥镜工作通道之前,用钳夹夹住滑结的环和固定端(未示出)。插入装置后,打开钳夹(图4(a)),并用于对齐缺损边缘(图4(b))。然后,释放第一个夹子,并将滑结的环固定在缺损边缘上(图4(c))。接着,使用钳夹抓取缺损的对侧边缘(图4(d))。以相同方式在对侧边缘放置第二个夹子,并带上环(图4(e))。接下来,使用钳夹将结推向夹子以收拢环,从而拉近缺损的对侧边缘(图4(f))。操作者在体外牵拉自由端使滑结张紧,同时钳夹在体内持住固定端(图4(g))。最后,使用内镜剪刀剪断线,完成闭合操作(图4(h))。

2.4 夹子‐滑结闭合的机械强度
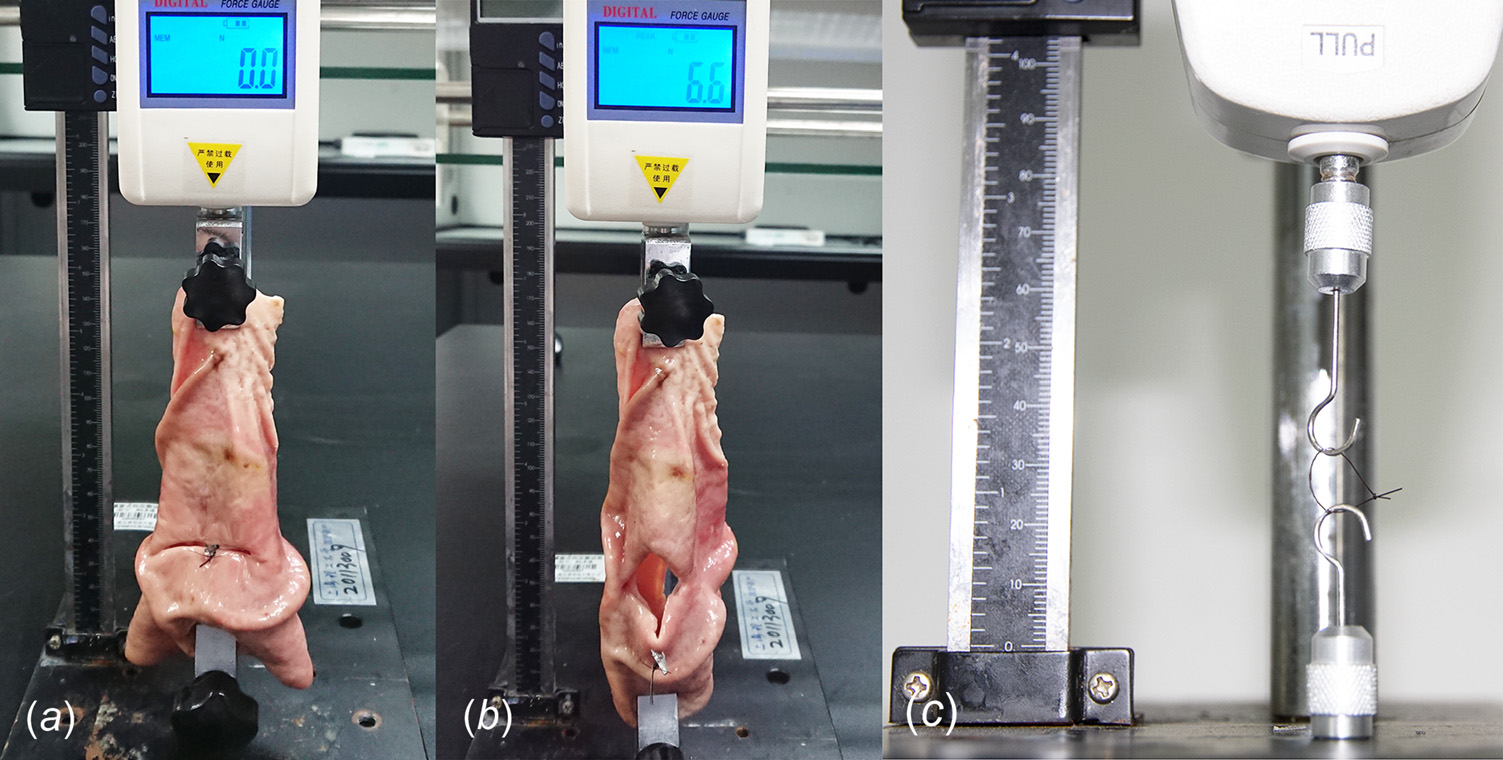
进行牵拉试验以评估该技术的可行性并研究闭合的机械强度。从新鲜屠宰的成年猪中获取三个离体猪胃。通过手术刀沿胃的大弯和小弯切开,获得六个半胃标本。在每个胃标本上制造一个5 cm的全层线性缺损。在每个缺损的中间部位使用两个夹子结合4SMR结进行闭合(图5)。使用改良内窥镜(其工作通道较大,为7 mm)来调节装置的管鞘,其外径分别为15 mm和5 mm,如图1(a)和5所示为闭合过程。闭合后,将半胃标本安装到拉力计(Handpi HP‐50,中国乐清)上,如图6(a)和6(b)所示,沿两个夹子对齐并垂直于缺损处进行钳夹。当闭合部位开裂时,记录每个夹子‐滑结闭合的牵拉力。
2.5 4S改良Roeder滑结的机械强度
本实验旨在评估张紧力对4S改良Roeder滑结机械强度的影响。选择尼龙3‐0作为缝合材料,因其具有较高的抗张载荷,且结易于向远端推送[18]。所有结均绑在两个0.5厘米半圆形杆上,并分别以2.5、5、7.5和10 N的张紧力进行张紧,每组20个重复。缝线末端被剪至3毫米,以容纳结滑脱[19]。随后将环转移至拉力计(Handpi NK‐100,中国)中,如图6(c)所示。每个环以5毫米/分钟的拉伸速率进行牵拉[18–20]。滑结的失效类型,定义为断裂或结滑脱,也被记录下来。
采用单因素方差分析研究张紧力对结强度的影响,显著性水平设为p < 0.05。均值比较使用邦弗罗尼法区间[21]。
3 结果
3.1 夹子‐滑结闭合的机械强度结果
六次闭合的平均牵拉力为6.3 ± 5.6 N,最大和最小牵拉力分别为4.4和9.8 N。所有闭合均在低牵拉载荷下因一个夹子从组织上脱落而发生失败。
3.2 4S改良Roeder滑结的机械强度结果
不同张紧力组别的平均峰值断裂力之间存在显著差异(图7)。失效峰值力与张紧力呈正相关。5牛顿组(16.3 ± 9.3 牛顿)和7.5 牛顿组(18.9 ± 10.4 牛顿)的平均峰值力与10 牛顿组(24.2 ± 12.0 牛顿;p = 0.075 和 p = 0.545)大致相当。然而,2.5牛顿组(7.16 ± 6.5 牛顿)的失效峰值力明显低于其他各组(p = 0.025 对比5牛顿组,p = 0.002 对比7.5牛顿组,p < 0.001 对比10牛顿组)。
使用10 N张紧的结滑脱率最低(15%)。使用7.5 N张紧的结位列第二,滑脱率为35%。5 N组的结滑脱率(50%)与断裂率(50%)相等,而2.5 N组中90%的结因结滑脱而失效。

4 讨论
大缺损的内镜下闭合对于消除术后并发症至关重要。通常需要使用多个夹子,从一侧到另一侧依次放置,直至大缺损完全闭合。然而,现有的经内镜钳道夹闭装置锚定能力较弱,且钳口开合尺寸有限,不适用于大缺损的闭合。为解决这些问题,已提出多种结合夹子与环形工具的闭合方法。其中滑结法较为理想,因其无需使用特殊装置和内窥镜。但普通滑结相比其他环形工具维持强度较差。4S改良Roeder结最初用于腹腔镜手术,因其具有良好的机械强度和操作便利性[22,23]。在此背景下,我们将4SMR滑结引入内镜手术,以提高闭合的维持能力,结合新型夹闭装置和单通道内镜,提出了一种针对大缺损的新闭合方法。
在此方法中,新型夹子装置的钳夹不仅可用于定位,还可分别在推结和拉紧打结时充当推进结的推结器和抓取结的抓钳。因此,无需使用其他内窥镜器械和特殊的双通道内镜。该装置的多功能夹闭装置有助于在一次插入内完成操作,减少因重新装填夹子和重新定位所需的手术时间。此外,所使用的夹子通过互锁臂和组织下方的带倒钩的鳍提供更好的锚定能力,可防止因牵拉导致夹子从组织上意外脱落。
通常,使用夹子和环状装置闭合大缺损有两种方法。最常用的方法是将两个夹子固定在缺损的相对侧,并通过环连接,类似于间断缝合,主要用于线性撕裂伤[11,24]。另一种方法专门用于闭合圆形缺损,通过在环上放置多个夹子,形成荷包缝合[25,26]。本研究中,我们选择了第一种方法,因为拟议的缺损为线性撕裂伤,其中央部分跨度最大且张力最强,单独使用夹子无法有效闭合。
根据机械强度结果,我们发现夹子‐滑结闭合能够承受一定的牵拉负荷。尽管安全闭合的牵拉力阈值尚不明确,但显然在术后住院期间,闭合部位所受的牵拉可被大幅减小,这意味着该结果可能是可接受的。此外,还可通过夹闭装置的多次插入,使用更多夹子甚至更多缝线来进一步加强闭合。
关于4SMR滑结,其机械强度和滑脱率与张紧力密切相关。考虑到滑脱率和机械强度,高于5牛顿的张紧力可能足以固定两个或更多夹子以闭合缺损。尽管使用更大的力来张紧滑结更为理想,但由于内镜的柔性部分,可能难以将其沿工作通道输送至远端。相反,2.5牛顿的张紧力由于滑脱率较高而不足以有效张紧滑结。
5 结论
我们提出了一种使用新型夹闭装置和4SMR滑结快速可靠地内镜下闭合大缺损的方法,该方法也可与其他商用夹子联合使用。这一概念已通过初步台架试验得到验证。同时研究了4SMR滑结在不同张力下的机械强度,表明建议施加超过5牛顿的力来收紧结。对于圆形缺损的离体研究,可能需要三个或更多夹子,相关进一步研究尚待定。
资助信息
- 国家自然科学基金(项目编号51735003)
- 国家留学基金,以及中国博士后科学基金资助项目(编号 2016M590368)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









