




 本文详细介绍如何在Ubuntu16.04环境下安装ArUco3.1.2库,并提供测试代码示例。ArUco是一款基于OpenCV的轻量级视觉开发库,用于估计相机位姿,在机器人导航和增强现实中广泛应用。
本文详细介绍如何在Ubuntu16.04环境下安装ArUco3.1.2库,并提供测试代码示例。ArUco是一款基于OpenCV的轻量级视觉开发库,用于估计相机位姿,在机器人导航和增强现实中广泛应用。
ArUco是一个基于OpenCV的轻量级视觉开发库,主要作用为根据预先设定好的Marker估计相机位姿,在机器人导航、增强现实和目标姿态估计中得到了较好的应用。在OpenCV的第三方视觉库opencv_contrib中,带有ArUco库,但由于opencv_contrib涵盖了大量的第三方库,整体庞大,本文直接基于ArUco官方提供的源码进行安装。
安装准备
1.操作系统Ubuntu16.04
2.Aruco3.1.2源码,下载地址:https://sourceforge.net/projects/aruco/files/,如下如所示,点击所需的版本号,然后点击download
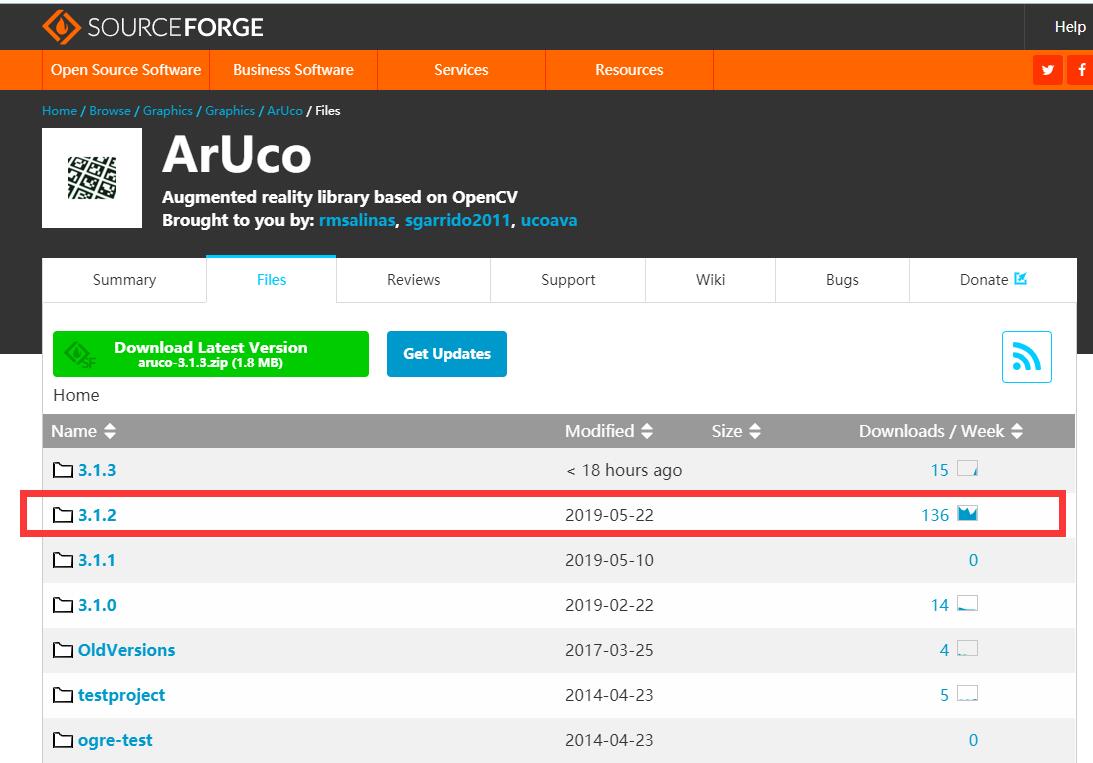 图1 图1
|
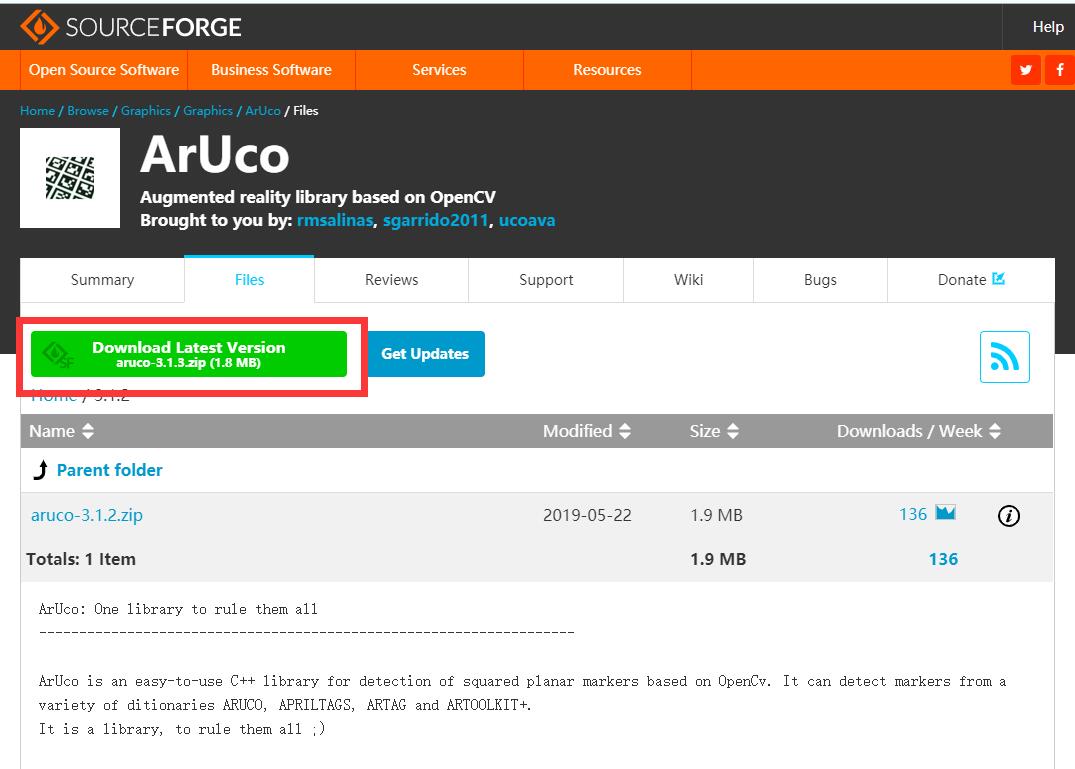 图2 图2
|
3.依赖环境OpenCV,版本≥2.4.9
4.安装工具CMAKE+MAKE
安装ArUco
- 安装方式采用CMAKE+MAKE,因此,务必保证系统已安装好CMAKE和MAKE工具,一般而言Ubuntu自带MAKE,所以只需要安装CMAKE即可,Ubuntu下安装CMAKE和MAKE可参考该网址。
- 由于ArUco是基于OpenCV开发的,所以在安装ArUco之前务必保证系统已安装好OpenCV,版本需高于2.4.9。没有安装OpenCV的,可以参考如下链接进行安装。
注:1和2中附带的教程都是先安装cmake,然后再安装opencv,可以互相参考。 - 从ArUco官网提供的地址下载源码,保存到本地,比如
/home/user/aruco-3.1.2.zip,user为你的用户名,文件名为aruco-3.1.2.zip - 解压缩
aruco-3.1.2.zip,然后安装,默认情况下make会将其安装在/usr/local下
unzip aruco-3.1.2.zip
cd aruco-3.1.2
mkdir build
cd build
cmake ..
sudo make -j4 install
- 安装好后,在
/usr/local文件夹下,./bin,./include/aruco,./lib,./share/aruco4个文件夹中分别包括了aruco库的可执行文件,头文件,库和cmake配置文件,其中./share/aruco下的arucoConfig.cmake文件很关键,通过cmake工具生成MakeFile时,cmake便通过该文件找到aruco库所依赖的各种文件 - 至此,完成ArUco库的安装工作
测试
- 在
/home/user,下新建一个文件夹ArUco_Test,新建一个cpp代码main.cpp
cd ~
mkdir ArUco_Test
cd ArUco_Test
vim main.cpp
代码如下:
#include <aruco/aruco.h>
#include <iostream>
#include <opencv2/highgui/highgui.hpp>
int main(int argc, char* argv[])
{
cv::Mat img = cv::imread("1.png"); //识别图片为1.png
aruco::MarkerDetector MDetector;
std::vector<aruco::Marker> markers=MDetector.detect(img);
std::cout << "Marker nums:" << markers.size() << std::endl;
for(size_t i=0; i<markers.size(); i++)
{
std::cout << markers[i] << std::endl;
}
return 0;
}
- 编辑
CMake文件,继续在ArUco_Test文件夹下新建一个CMakeLists.txt,编辑如下代码
#cmake最低版本要求
cmake_minimum_required(VERSION 2.8)
#工程名ArUco_Test
project(ArUco_Test)
#搜索OpenCV依赖库,cmake默认搜索/usr/local/share文件夹下的文件,下同
find_package(OpenCV REQUIRED)
#搜索ArUco依赖库
find_package(aruco REQUIRED)
#从main.cpp生成可执行文件ArUco_Test
add_executable(ArUco_Test main.cpp)
#生成文件链接至OpenCV库,注意OpenCV_LIBS变量需在OpenCVConfig.cmake文件中定义,下同
target_link_libraries(ArUco_Test ${OpenCV_LIBS})
#生成文件链接至aruco库
target_link_libraries(ArUco_Test ${aruco_LIBS})
#采用c++11标准编译,没有此句会报错
set(CMAKE_CXX_FLAGS "-std=c++11")
- 编译,运行,指定文件夹下需要包含1张含有ArUco Marker的图片,如上述代码中的
1.png
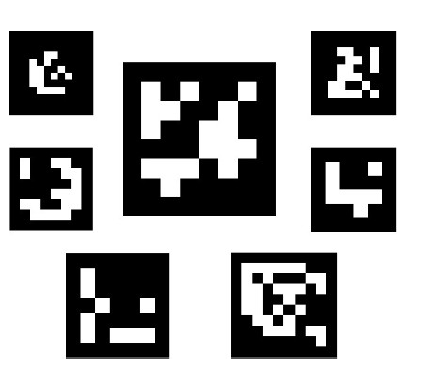 1.png 1.png
|
mkdir build
cd build
cmake ..
make
./ArUco_Test
- 输出如下代码,表示测试正常
Marker nums:1
33=(65.5789,252.614) (168.545,252.603) (168.438,358.084) (65.6421,358.078) Txyz=-999999 -999999 -999999 Rxyz=-999999 -999999 -999999
1.https://blog.youkuaiyun.com/baidu_34971492/article/details/81665538
2.https://blog.youkuaiyun.com/Ding_0110M/article/details/88083741
3.https://blog.youkuaiyun.com/weixin_43053387/article/details/84952557


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









