




1 未经任何优化的服务器
1.1 代码
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <strings.h>
#include <string.h>
#include <ctype.h>
#include <arpa/inet.h>
#define SERV_PORT 9527
int main(void)
{
int sfd, cfd;
int len, i;
char buf[BUFSIZ], clie_IP[BUFSIZ];
struct sockaddr_in serv_addr, clie_addr;
socklen_t clie_addr_len;
/*创建一个socket 指定IPv4协议族 TCP协议*/
sfd = socket(AF_INET, SOCK_STREAM, 0);
/*初始化一个地址结构 man 7 ip 查看对应信息*/
bzero(&serv_addr, sizeof(serv_addr)); //将整个结构体清零
serv_addr.sin_family = AF_INET; //选择协议族为IPv4
serv_addr.sin_addr.s_addr = htonl(INADDR_ANY); //监听本地所有IP地址
serv_addr.sin_port = htons(SERV_PORT); //绑定端口号
/*绑定服务器地址结构*/
bind(sfd, (struct sockaddr *)&serv_addr, sizeof(serv_addr));
/*设定链接上限,注意此处不阻塞*/
listen(sfd, 64); //同一时刻允许向服务器发起链接请求的数量
printf("wait for client connect ...\n");
/*获取客户端地址结构大小*/
clie_addr_len = sizeof(clie_addr);
/*参数1是sfd; 参2传出参数, 参3传入传入参数, 全部是client端的参数*/
cfd = accept(sfd, (struct sockaddr *)&clie_addr, &clie_addr_len); /*监听客户端链接, 会阻塞*/
printf("client IP:%s\tport:%d\n",
inet_ntop(AF_INET, &clie_addr.sin_addr.s_addr, clie_IP, sizeof(clie_IP)),
ntohs(clie_addr.sin_port));
while (1) {
/*读取客户端发送数据*/
len = read(cfd, buf, sizeof(buf));
write(STDOUT_FILENO, buf, len);
/*处理客户端数据*/
for (i = 0; i < len; i++)
buf[i] = toupper(buf[i]);
/*处理完数据回写给客户端*/
write(cfd, buf, len);
}
/*关闭链接*/
close(sfd);
close(cfd);
return 0;
}
1.2 测试代码
nc 127.0.0.1 9527
1.3 测试效果

1.4问题
只能一个客户端连接,根部不具备实用性。
可以考虑多进程、多线程进行改进
2改进版的普通服务器
第一个服务器只能连接一个客户端,哪怕在客户端断开之后,别的客户端也不能加入进来。主要是在read的时候,没有对read返回值进行判断。read=0.有一种情况就是,客户端的关闭,这种情况下,就没有必要一直连接着套接字,可以直接断开。
2.1 代码
#include <stdio.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <strings.h>
#include <string.h>
#include <ctype.h>
#include <arpa/inet.h>
#define SERV_PORT 9527
int main(void)
{
int sfd, cfd;
int len, i;
char buf[BUFSIZ], clie_IP[BUFSIZ];
struct sockaddr_in serv_addr, clie_addr;
socklen_t clie_addr_len;
/*创建一个socket 指定IPv4协议族 TCP协议*/
sfd = socket(AF_INET, SOCK_STREAM, 0);
/*初始化一个地址结构 man 7 ip 查看对应信息*/
bzero(&serv_addr, sizeof(serv_addr)); //将整个结构体清零
serv_addr.sin_family = AF_INET; //选择协议族为IPv4
serv_addr.sin_addr.s_addr = htonl(INADDR_ANY); //监听本地所有IP地址
serv_addr.sin_port = htons(SERV_PORT); //绑定端口号
/*绑定服务器地址结构*/
bind(sfd, (struct sockaddr *)&serv_addr, sizeof(serv_addr));
/*设定链接上限,注意此处不阻塞*/
listen(sfd, 64); //同一时刻允许向服务器发起链接请求的数量
printf("wait for client connect ...\n");
/*获取客户端地址结构大小*/
clie_addr_len = sizeof(clie_addr);
/*参数1是sfd; 参2传出参数, 参3传入传入参数, 全部是client端的参数*/
while (1) {
/*读取客户端发送数据*/
cfd = accept(sfd, (struct sockaddr *)&clie_addr, &clie_addr_len); /*监听客户端链接, 会阻塞*/
printf("client IP:%s\tport:%d\n", inet_ntop(AF_INET, &clie_addr.sin_addr.s_addr, clie_IP, sizeof(clie_IP)), ntohs(clie_addr.sin_port));
len = read(cfd, buf, sizeof(buf));
if(len==0)
{
close(cfd);
continue;
}
write(STDOUT_FILENO, buf, len);
/*处理客户端数据*/
for (i = 0; i < len; i++)
buf[i] = toupper(buf[i]);
/*处理完数据回写给客户端*/
write(cfd, buf, len);
}
/*关闭链接*/
close(sfd);
close(cfd);
return 0;
}
2.2 测试代码
nc 127.0.0.1 9527
2.3测试结果

2.4 问题
主要还是客户端连接数的问题,只能连接一个客户端,不具备实用性,我们的目标是:连接数可以达到上万级别的高性能服务器。
改进:集中在 多路IO转接与多进程,多线程处理
3 多进程版的服务器
主进程负责去监听套接字,一旦监听到套接字,就创建一个子进程去处理这个连接请求。
1. Socket(); 创建 监听套接字 lfd
2. Bind() 绑定地址结构 Strcut scokaddr_in addr;
3. Listen();
4. while (1) {
cfd = Accpet(); 接收客户端连接请求。
pid = fork();
if (pid == 0){ 子进程 read(cfd) --- 小--->大 --- write(cfd)
close(lfd) 关闭用于建立连接的套接字 lfd
read()
小--大
write()
} else if (pid > 0) {
close(cfd); 关闭用于与客户端通信的套接字 cfd
contiue;
}
}
5. 子进程:
close(lfd)
read()
小-->大
write()
父进程:
close(cfd);
注册信号捕捉函数: SIGCHLD
在回调函数中, 完成子进程回收
while (waitpid());
3.1 代码
#include<stdio.h>
#include<stdlib.h>
#include<string.h>
#include<sys/socket.h>
#include<arpa/inet.h>
#include<unistd.h>
#include<pthread.h>
#include<strings.h>
#include<ctype.h>
int main(int argc,char* argv[])
{
int lfd,cfd;
int ret=0;
pid_t pid;
char buf[1024];
int i;
struct sockaddr_in server_addr,client_addr;
socklen_t client_addr_len=sizeof(client_addr);
//memset(&server_addr,0,sizeof(server_addr)); //将地址结构清零
bzero(&server_addr,sizeof(server_addr));
lfd=socket(AF_INET,SOCK_STREAM,0);
server_addr.sin_port=htons(9527);
server_addr.sin_addr.s_addr=htonl(INADDR_ANY);
server_addr.sin_family=AF_INET;
bind(lfd,(struct sockaddr*)&server_addr,sizeof(server_addr));
listen(lfd,50);
while(1)
{
cfd=accept(lfd,(struct sockaddr*)&client_addr,&client_addr_len);
pid=fork();
if(pid==0)
{
close(lfd);
break;
}
else if(pid>0)
{
close(cfd);
}
}
if(pid==0)
{
for(;;)
{
ret=read(cfd,buf,sizeof(buf));
for(i=0;i<ret;i++)
buf[i]=toupper(buf[i]);
write(cfd,buf,ret);
write(STDOUT_FILENO,buf,ret);
}
close(cfd);
}
return 0;
}
3.2 测试代码
nc 127.0.0.1 9527
3.3 测试结果

4 多线程服务器
多线程服务器,相对于多进程服务器,执行逻辑没有任何区别,主要是从进程处理改成了线程处理,相对的,资源的消耗较小,并且切换代价也小,切换速度很快。对于高并发的情况下,多进程相对于多线程,资源消耗是巨大的。
1. Socket(); 创建 监听套接字 lfd
2. Bind() 绑定地址结构 Strcut scokaddr_in addr;
3. Listen();
4. while (1) {
cfd = Accept(lfd, );
pthread_create(&tid, NULL, tfn, (void *)cfd);
pthread_detach(tid); // pthead_join(tid, void **); 新线程---专用于回收子线程。
}
5. 子线程:
void *tfn(void *arg)
{
// close(lfd) 不能关闭。 主线程要使用lfd
read(cfd)
小--大
write(cfd)
pthread_exit((void *)10);
}
4.1 代码
#include <stdio.h>
#include <string.h>
#include <arpa/inet.h>
#include <pthread.h>
#include <ctype.h>
#include <unistd.h>
#include <fcntl.h>
#include "wrap.h"
#define MAXLINE 8192
#define SERV_PORT 8000
struct s_info { //定义一个结构体, 将地址结构跟cfd捆绑
struct sockaddr_in cliaddr;
int connfd;
};
void *do_work(void *arg)
{
int n,i;
struct s_info *ts = (struct s_info*)arg;
char buf[MAXLINE];
char str[INET_ADDRSTRLEN]; //#define INET_ADDRSTRLEN 16 可用"[+d"查看
while (1) {
n = Read(ts->connfd, buf, MAXLINE); //读客户端
if (n == 0) {
printf("the client %d closed...\n", ts->connfd);
break; //跳出循环,关闭cfd
}
printf("received from %s at PORT %d\n",
inet_ntop(AF_INET, &(*ts).cliaddr.sin_addr, str, sizeof(str)),
ntohs((*ts).cliaddr.sin_port)); //打印客户端信息(IP/PORT)
for (i = 0; i < n; i++)
buf[i] = toupper(buf[i]); //小写-->大写
Write(STDOUT_FILENO, buf, n); //写出至屏幕
Write(ts->connfd, buf, n); //回写给客户端
}
Close(ts->connfd);
return (void *)0;
}
int main(void)
{
struct sockaddr_in servaddr, cliaddr;
socklen_t cliaddr_len;
int listenfd, connfd;
pthread_t tid;
struct s_info ts[256]; //根据最大线程数创建结构体数组.
int i = 0;
listenfd = Socket(AF_INET, SOCK_STREAM, 0); //创建一个socket, 得到lfd
bzero(&servaddr, sizeof(servaddr)); //地址结构清零
servaddr.sin_family = AF_INET;
servaddr.sin_addr.s_addr = htonl(INADDR_ANY); //指定本地任意IP
servaddr.sin_port = htons(SERV_PORT); //指定端口号 8000
Bind(listenfd, (struct sockaddr *)&servaddr, sizeof(servaddr)); //绑定
Listen(listenfd, 128); //设置同一时刻链接服务器上限数
printf("Accepting client connect ...\n");
while (1) {
cliaddr_len = sizeof(cliaddr);
connfd = Accept(listenfd, (struct sockaddr *)&cliaddr, &cliaddr_len); //阻塞监听客户端链接请求
ts[i].cliaddr = cliaddr;
ts[i].connfd = connfd;
/* 达到线程最大数时,pthread_create出错处理, 增加服务器稳定性 */
pthread_create(&tid, NULL, do_work, (void*)&ts[i]);
pthread_detach(tid); //子线程分离,防止僵线程产生.
i++;
}
return 0;
}
4.2 测试代码
nc 127.0.0.1 9527
4.3 测试结果

4.4 问题
在执行逻辑这一款没问题,主要还是在主线程这块。监听效率太低了,只能一个一个去监听,一旦监听不到,就会阻塞。很影响主线程的效率。
可以通过IO端口复用来解决,高效的监控各个套接字。下面的篇幅很多还是来阐述IO复用的,主要是简述select poll epoll 三者的使用,三者的优缺点。
还有就是尽管,多线程可以大大减小因为连接数的增加所导致的资源消耗过大于切换时间过多的问题,但对于再往上走的高并发模型来说。多线程也是不能够解决问题,这里又引入了线性池模型。
5 线程池
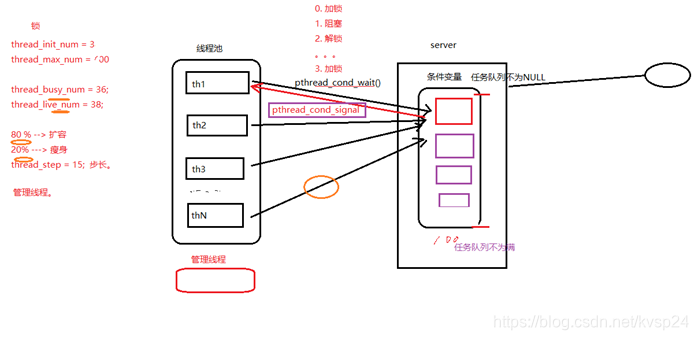
线程池是一种多线程处理形式,处理过程中将任务添加到队列,然后在创建线程后自动启动这些任务。线程池线程都是后台线程。每个线程都使用默认的堆栈大小,以默认的优先级运行,并处于多线程单元中。如果某个线程在托管代码中空闲(如正在等待某个事件),则线程池将插入另一个辅助线程来使所有处理器保持繁忙。如果所有线程池线程都始终保持繁忙,但队列中包含挂起的工作,则线程池将在一段时间后创建另一个辅助线程但线程的数目永远不会超过最大值。超过最大值的线程可以排队,但他们要等到其他线程完成后才启动。
5.1 代码
#include <stdlib.h>
#include <pthread.h>
#include <unistd.h>
#include <assert.h>
#include <stdio.h>
#include <string.h>
#include <signal.h>
#include <errno.h>
#include "threadpool.h"
#define DEFAULT_TIME 10 /*10s检测一次*/
#define MIN_WAIT_TASK_NUM 10 /*如果queue_size > MIN_WAIT_TASK_NUM 添加新的线程到线程池*/
#define DEFAULT_THREAD_VARY 10 /*每次创建和销毁线程的个数*/
#define true 1
#define false 0
typedef struct {
void *(*function)(void *); /* 函数指针,回调函数 */
void *arg; /* 上面函数的参数 */
} threadpool_task_t; /* 各子线程任务结构体 */
/* 描述线程池相关信息 */
struct threadpool_t {
pthread_mutex_t lock; /* 用于锁住本结构体 */
pthread_mutex_t thread_counter; /* 记录忙状态线程个数de琐 -- busy_thr_num */
pthread_cond_t queue_not_full; /* 当任务队列满时,添加任务的线程阻塞,等待此条件变量 */
pthread_cond_t queue_not_empty; /* 任务队列里不为空时,通知等待任务的线程 */
pthread_t *threads; /* 存放线程池中每个线程的tid。数组 */
pthread_t adjust_tid; /* 存管理线程tid */
threadpool_task_t *task_queue; /* 任务队列 */
int min_thr_num; /* 线程池最小线程数 */
int max_thr_num; /* 线程池最大线程数 */
int live_thr_num; /* 当前存活线程个数 */
int busy_thr_num; /* 忙状态线程个数 */
int wait_exit_thr_num; /* 要销毁的线程个数 */
int queue_front; /* task_queue队头下标 */
int queue_rear; /* task_queue队尾下标 */
int queue_size; /* task_queue队中实际任务数 */
int queue_max_size; /* task_queue队列可容纳任务数上限 */
int shutdown; /* 标志位,线程池使用状态,true或false */
};
/**
* @function void *threadpool_thread(void *threadpool)
* @desc the worker thread
* @param threadpool the pool which own the thread
*/
void *threadpool_thread(void *threadpool);
/**
* @function void *adjust_thread(void *threadpool);
* @desc manager thread
* @param threadpool the threadpool
*/
void *adjust_thread(void *threadpool);
/**
* check a thread is alive
*/
int is_thread_alive(pthread_t tid);
int threadpool_free(threadpool_t *pool);
threadpool_t *threadpool_create(int min_thr_num, int max_thr_num, int queue_max_size)
{
int i;
threadpool_t *pool = NULL;
do {
if((pool = (threadpool_t *)malloc(sizeof(threadpool_t))) == NULL) {
printf("malloc threadpool fail");
break;/*跳出do while*/
}
pool->min_thr_num = min_thr_num;
pool->max_thr_num = max_thr_num;
pool->busy_thr_num = 0;
pool->live_thr_num = min_thr_num; /* 活着的线程数 初值=最小线程数 */
pool->queue_size = 0; /* 有0个产品 */
pool->queue_max_size = queue_max_size;
pool->queue_front = 0;
pool->queue_rear = 0;
pool->shutdown = false; /* 不关闭线程池 */
/* 根据最大线程上限数, 给工作线程数组开辟空间, 并清零 */
pool->threads = (pthread_t *)malloc(sizeof(pthread_t)*max_thr_num);
if (pool->threads == NULL) {
printf("malloc threads fail");
break;
}
memset(pool->threads, 0, sizeof(pthread_t)*max_thr_num);
/* 队列开辟空间 */
pool->task_queue = (threadpool_task_t *)malloc(sizeof(threadpool_task_t)*queue_max_size);
if (pool->task_queue == NULL) {
printf("malloc task_queue fail");
break;
}
/* 初始化互斥琐、条件变量 */
if (pthread_mutex_init(&(pool->lock), NULL) != 0
|| pthread_mutex_init(&(pool->thread_counter), NULL) != 0
|| pthread_cond_init(&(pool->queue_not_empty), NULL) != 0
|| pthread_cond_init(&(pool->queue_not_full), NULL) != 0)
{
printf("init the lock or cond fail");
break;
}
/* 启动 min_thr_num 个 work thread */
for (i = 0; i < min_thr_num; i++) {
pthread_create(&(pool->threads[i]), NULL, threadpool_thread, (void *)pool);/*pool指向当前线程池*/
printf("start thread 0x%x...\n", (unsigned int)pool->threads[i]);
}
pthread_create(&(pool->adjust_tid), NULL, adjust_thread, (void *)pool);/* 启动管理者线程 */
return pool;
} while (0);
threadpool_free(pool); /* 前面代码调用失败时,释放poll存储空间 */
return NULL;
}
/* 向线程池中 添加一个任务 */
int threadpool_add(threadpool_t *pool, void*(*function)(void *arg), void *arg)
{
pthread_mutex_lock(&(pool->lock));
/* ==为真,队列已经满, 调wait阻塞 */
while ((pool->queue_size == pool->queue_max_size) && (!pool->shutdown)) {
pthread_cond_wait(&(pool->queue_not_full), &(pool->lock));
}
if (pool->shutdown) {
pthread_mutex_unlock(&(pool->lock));
}
/* 清空 工作线程 调用的回调函数 的参数arg */
if (pool->task_queue[pool->queue_rear].arg != NULL) {
free(pool->task_queue[pool->queue_rear].arg);
pool->task_queue[pool->queue_rear].arg = NULL;
}
/*添加任务到任务队列里*/
pool->task_queue[pool->queue_rear].function = function;
pool->task_queue[pool->queue_rear].arg = arg;
pool->queue_rear = (pool->queue_rear + 1) % pool->queue_max_size; /* 队尾指针移动, 模拟环形 */
pool->queue_size++;
/*添加完任务后,队列不为空,唤醒线程池中 等待处理任务的线程*/
pthread_cond_signal(&(pool->queue_not_empty));
pthread_mutex_unlock(&(pool->lock));
return 0;
}
/* 线程池中各个工作线程 */
void *threadpool_thread(void *threadpool)
{
threadpool_t *pool = (threadpool_t *)threadpool;
threadpool_task_t task;
while (true) {
/* Lock must be taken to wait on conditional variable */
/*刚创建出线程,等待任务队列里有任务,否则阻塞等待任务队列里有任务后再唤醒接收任务*/
pthread_mutex_lock(&(pool->lock));
/*queue_size == 0 说明没有任务,调 wait 阻塞在条件变量上, 若有任务,跳过该while*/
while ((pool->queue_size == 0) && (!pool->shutdown)) {
printf("thread 0x%x is waiting\n", (unsigned int)pthread_self());
pthread_cond_wait(&(pool->queue_not_empty), &(pool->lock));
/*清除指定数目的空闲线程,如果要结束的线程个数大于0,结束线程*/
if (pool->wait_exit_thr_num > 0) {
pool->wait_exit_thr_num--;
/*如果线程池里线程个数大于最小值时可以结束当前线程*/
if (pool->live_thr_num > pool->min_thr_num) {
printf("thread 0x%x is exiting\n", (unsigned int)pthread_self());
pool->live_thr_num--;
pthread_mutex_unlock(&(pool->lock));
pthread_exit(NULL);
}
}
}
/*如果指定了true,要关闭线程池里的每个线程,自行退出处理*/
if (pool->shutdown) {
pthread_mutex_unlock(&(pool->lock));
printf("thread 0x%x is exiting\n", (unsigned int)pthread_self());
pthread_exit(NULL); /* 线程自行结束 */
}
/*从任务队列里获取任务, 是一个出队操作*/
task.function = pool->task_queue[pool->queue_front].function;
task.arg = pool->task_queue[pool->queue_front].arg;
pool->queue_front = (pool->queue_front + 1) % pool->queue_max_size; /* 出队,模拟环形队列 */
pool->queue_size--;
/*通知可以有新的任务添加进来*/
pthread_cond_broadcast(&(pool->queue_not_full));
/*任务取出后,立即将 线程池琐 释放*/
pthread_mutex_unlock(&(pool->lock));
/*执行任务*/
printf("thread 0x%x start working\n", (unsigned int)pthread_self());
pthread_mutex_lock(&(pool->thread_counter)); /*忙状态线程数变量琐*/
pool->busy_thr_num++; /*忙状态线程数+1*/
pthread_mutex_unlock(&(pool->thread_counter));
(*(task.function))(task.arg); /*执行回调函数任务*/
//task.function(task.arg); /*执行回调函数任务*/
/*任务结束处理*/
printf("thread 0x%x end working\n", (unsigned int)pthread_self());
pthread_mutex_lock(&(pool->thread_counter));
pool->busy_thr_num--; /*处理掉一个任务,忙状态数线程数-1*/
pthread_mutex_unlock(&(pool->thread_counter));
}
pthread_exit(NULL);
}
/* 管理线程 */
void *adjust_thread(void *threadpool)
{
int i;
threadpool_t *pool = (threadpool_t *)threadpool;
while (!pool->shutdown) {
sleep(DEFAULT_TIME); /*定时 对线程池管理*/
pthread_mutex_lock(&(pool->lock));
int queue_size = pool->queue_size; /* 关注 任务数 */
int live_thr_num = pool->live_thr_num; /* 存活 线程数 */
pthread_mutex_unlock(&(pool->lock));
pthread_mutex_lock(&(pool->thread_counter));
int busy_thr_num = pool->busy_thr_num; /* 忙着的线程数 */
pthread_mutex_unlock(&(pool->thread_counter));
/* 创建新线程 算法: 任务数大于最小线程池个数, 且存活的线程数少于最大线程个数时 如:30>=10 && 40<100*/
if (queue_size >= MIN_WAIT_TASK_NUM && live_thr_num < pool->max_thr_num) {
pthread_mutex_lock(&(pool->lock));
int add = 0;
/*一次增加 DEFAULT_THREAD 个线程*/
for (i = 0; i < pool->max_thr_num && add < DEFAULT_THREAD_VARY
&& pool->live_thr_num < pool->max_thr_num; i++) {
if (pool->threads[i] == 0 || !is_thread_alive(pool->threads[i])) {
pthread_create(&(pool->threads[i]), NULL, threadpool_thread, (void *)pool);
add++;
pool->live_thr_num++;
}
}
pthread_mutex_unlock(&(pool->lock));
}
/* 销毁多余的空闲线程 算法:忙线程X2 小于 存活的线程数 且 存活的线程数 大于 最小线程数时*/
if ((busy_thr_num * 2) < live_thr_num && live_thr_num > pool->min_thr_num) {
/* 一次销毁DEFAULT_THREAD个线程, 隨機10個即可 */
pthread_mutex_lock(&(pool->lock));
pool->wait_exit_thr_num = DEFAULT_THREAD_VARY; /* 要销毁的线程数 设置为10 */
pthread_mutex_unlock(&(pool->lock));
for (i = 0; i < DEFAULT_THREAD_VARY; i++) {
/* 通知处在空闲状态的线程, 他们会自行终止*/
pthread_cond_signal(&(pool->queue_not_empty));
}
}
}
return NULL;
}
int threadpool_destroy(threadpool_t *pool)
{
int i;
if (pool == NULL) {
return -1;
}
pool->shutdown = true;
/*先销毁管理线程*/
pthread_join(pool->adjust_tid, NULL);
for (i = 0; i < pool->live_thr_num; i++) {
/*通知所有的空闲线程*/
pthread_cond_broadcast(&(pool->queue_not_empty));
}
for (i = 0; i < pool->live_thr_num; i++) {
pthread_join(pool->threads[i], NULL);
}
threadpool_free(pool);
return 0;
}
int threadpool_free(threadpool_t *pool)
{
if (pool == NULL) {
return -1;
}
if (pool->task_queue) {
free(pool->task_queue);
}
if (pool->threads) {
free(pool->threads);
pthread_mutex_lock(&(pool->lock));
pthread_mutex_destroy(&(pool->lock));
pthread_mutex_lock(&(pool->thread_counter));
pthread_mutex_destroy(&(pool->thread_counter));
pthread_cond_destroy(&(pool->queue_not_empty));
pthread_cond_destroy(&(pool->queue_not_full));
}
free(pool);
pool = NULL;
return 0;
}
int threadpool_all_threadnum(threadpool_t *pool)
{
int all_threadnum = -1;
pthread_mutex_lock(&(pool->lock));
all_threadnum = pool->live_thr_num;
pthread_mutex_unlock(&(pool->lock));
return all_threadnum;
}
int threadpool_busy_threadnum(threadpool_t *pool)
{
int busy_threadnum = -1;
pthread_mutex_lock(&(pool->thread_counter));
busy_threadnum = pool->busy_thr_num;
pthread_mutex_unlock(&(pool->thread_counter));
return busy_threadnum;
}
int is_thread_alive(pthread_t tid)
{
int kill_rc = pthread_kill(tid, 0); //发0号信号,测试线程是否存活
if (kill_rc == ESRCH) {
return false;
}
return true;
}
/*测试*/
#if 1
/* 线程池中的线程,模拟处理业务 */
void *process(void *arg)
{
printf("thread 0x%x working on task %d\n ",(unsigned int)pthread_self(),*(int *)arg);
sleep(1);
printf("task %d is end\n",*(int *)arg);
return NULL;
}
int main(void)
{
/*threadpool_t *threadpool_create(int min_thr_num, int max_thr_num, int queue_max_size);*/
threadpool_t *thp = threadpool_create(3,100,100);/*创建线程池,池里最小3个线程,最大100,队列最大100*/
printf("pool inited");
//int *num = (int *)malloc(sizeof(int)*20);
int num[20], i;
for (i = 0; i < 20; i++) {
num[i]=i;
printf("add task %d\n",i);
threadpool_add(thp, process, (void*)&num[i]); /* 向线程池中添加任务 */
}
sleep(10); /* 等子线程完成任务 */
threadpool_destroy(thp);
return 0;
}
#endif
#ifndef __THREADPOOL_H_
#define __THREADPOOL_H_
typedef struct threadpool_t threadpool_t;
/**
* @function threadpool_create
* @descCreates a threadpool_t object.
* @param thr_num thread num
* @param max_thr_num max thread size
* @param queue_max_size size of the queue.
* @return a newly created thread pool or NULL
*/
threadpool_t *threadpool_create(int min_thr_num, int max_thr_num, int queue_max_size);
/**
* @function threadpool_add
* @desc add a new task in the queue of a thread pool
* @param pool Thread pool to which add the task.
* @param function Pointer to the function that will perform the task.
* @param argument Argument to be passed to the function.
* @return 0 if all goes well,else -1
*/
int threadpool_add(threadpool_t *pool, void*(*function)(void *arg), void *arg);
/**
* @function threadpool_destroy
* @desc Stops and destroys a thread pool.
* @param pool Thread pool to destroy.
* @return 0 if destory success else -1
*/
int threadpool_destroy(threadpool_t *pool);
/**
* @desc get the thread num
* @pool pool threadpool
* @return # of the thread
*/
int threadpool_all_threadnum(threadpool_t *pool);
/**
* desc get the busy thread num
* @param pool threadpool
* return # of the busy thread
*/
int threadpool_busy_threadnum(threadpool_t *pool);
#endif
6 select
提到select、poll、epoll相信大家都耳熟能详了,三个都是IO多路复用的机制,可以监视多个描述符的读/写等事件,一旦某个描述符就绪(一般是读或者写事件发生了),就能够将发生的事件通知给关心的应用程序去处理该事件。本质上,select、poll、epoll本质上都是同步I/O,相信大家都读过Richard Stevens的经典书籍UNP(UNIX®️ Network Programming),书中给出了5种IO模型:
[1] blocking IO - 阻塞IO
[2] nonblocking IO - 非阻塞IO
[3] IO multiplexing - IO多路复用
[4] signal driven IO - 信号驱动IO
[5] asynchronous IO - 异步IO
int select(int nfds, fd_set *readfds, fd_set *writefds,fd_set *exceptfds, struct timeval *timeout);
fd_set 是一个位图,为1的表示整个文件描述符处于监听的状态,为0,则是没有被监听。
nfds:监听的所有文件描述符中,最大文件描述符+1
readfds: 读 文件描述符监听集合。 传入、传出参数
writefds: 写 文件描述符监听集合。 传入、传出参数 NULL
exceptfds:异常 文件描述符监听集合 传入、传出参数 NULL
timeout: > 0: 设置监听超时时长。
NULL: 阻塞监听
0: 非阻塞监听,轮询
返回值:
> 0: 所有监听集合(3个)中, 满足对应事件的总数。
0: 没有满足监听条件的文件描述符
-1: errno
fd 是一个位图,所以会有相应的位操作。
void FD_CLR(int fd, fd_set *set) 把某一个fd清除出去
int FD_ISSET(int fd, fd_set *set) 判定某个fd是否在位图中
void FD_SET(int fd, fd_set *set) 把某一个fd添加到位图
void FD_ZERO(fd_set *set) 位图所有二进制位置零
select多路IO转接:
原理: 借助内核, select 来监听, 客户端连接、数据通信事件。
void FD_ZERO(fd_set *set); --- 清空一个文件描述符集合。
fd_set rset;
FD_ZERO(&rset);
void FD_SET(int fd, fd_set *set); --- 将待监听的文件描述符,添加到监听集合中
FD_SET(3, &rset); FD_SET(5, &rset); FD_SET(6, &rset);
void FD_CLR(int fd, fd_set *set); --- 将一个文件描述符从监听集合中 移除。
FD_CLR(4, &rset);
int FD_ISSET(int fd, fd_set *set); --- 判断一个文件描述符是否在监听集合中。
返回值: 在:1;不在:0;
FD_ISSET(4, &rset);
int maxfd = 0;
lfd = socket() ; 创建套接字
maxfd = lfd;
bind(); 绑定地址结构
listen(); 设置监听上限
fd_set rset, allset; 创建r监听集合
FD_ZERO(&allset); 将all监听集合清空
FD_SET(lfd, &allset); 将 lfd 添加至读集合中。
while(1) {
rset = allset; 保存监听集合
ret = select(lfd+1, &rset, NULL, NULL, NULL); 监听文件描述符集合对应事件。
if(ret > 0) { 有监听的描述符满足对应事件
if (FD_ISSET(lfd, &rset)) { // 1 在。 0不在。
cfd = accept(); 建立连接,返回用于通信的文件描述符
maxfd = cfd;
FD_SET(cfd, &allset); 添加到监听通信描述符集合中。
}
for (i = lfd+1; i <= 最大文件描述符; i++){
FD_ISSET(i, &rset) 有read、write事件
read()
小 -- 大
write();
}
}
}
6.4 问题
(1)被监控的fds集合限制为1024,1024太小了,我们希望能够有个比较大的可监控fds集合,由于fd_ t 这个类型限制了,它是一个1024的位图。
(2)fds集合需要从用户空间拷贝到内核空间的问题,我们希望不需要拷贝。需要从用户空间拷贝到内核空间进行轮询比较,然后又需要将改变好的位图复制到用户空间去,复制给用户空间的位图。
(3)当被监控的fds中某些有数据可读的时候,我们希望通知更加精细一点,就是我们希望能够从通知中得到有可读事件的fds列表,而不是需要遍历整个fds来收集。
缺点: 监听上限受文件描述符限制。 最大 1024.
检测满足条件的fd, 自己添加业务逻辑提高小。 提高了编码难度。
优点: 跨平台。win、linux、macOS、Unix、类Unix、mips
select代码里有个可以优化的地方,用数组存下文件描述符,这样就不需要每次扫描一大堆无关文件描述符了
7 POLL
poll是对select的改进,但是它是个半成品,相对select提升不大。最终版本是epoll,所以poll了解一下就完事儿,重点掌握epoll。
poll:
int poll(struct pollfd *fds, nfds_t nfds, int timeout);
创建了一个新的集合用于监听,将事件于文件描述符绑定在了一起,并且将监听事件与返回事件分开,便于操作。
fds:监听的文件描述符【数组】
struct pollfd {
int fd: 待监听的文件描述符
short events: 待监听的文件描述符对应的监听事件
取值:POLLIN、POLLOUT、POLLERR
short revnets: 传入时, 给0。如果满足对应事件的话, 返回 非0 --> POLLIN、POLLOUT、POLLERR
}
nfds: 监听数组的,实际有效监听个数。
timeout: > 0: 超时时长。单位:毫秒。
-1: 阻塞等待
0: 不阻塞
返回值:返回满足对应监听事件的文件描述符 总个数。
优点:
自带数组结构。 可以将 监听事件集合 和 返回事件集合 分离。
拓展 监听上限。 超出 1024限制。
缺点:
不能跨平台。 Linux
无法直接定位满足监听事件的文件描述符, 编码难度较大。
8 EPOLL
epoll:
改进的地方在于避免的重复的在内核空间与用户空间的拷贝,节省大量的时间。
int epoll_create(int size); 创建一棵监听红黑树
size:创建的红黑树的监听节点数量。(仅供内核参考。)
返回值:指向新创建的红黑树的根节点的 fd。
失败: -1 errno
int epoll_ctl(int epfd, int op, int fd, struct epoll_event *event); 操作监听红黑树
epfd:epoll_create 函数的返回值。 epfd
op:对该监听红黑数所做的操作。
EPOLL_CTL_ADD 添加fd到 监听红黑树
EPOLL_CTL_MOD 修改fd在 监听红黑树上的监听事件。
EPOLL_CTL_DEL 将一个fd 从监听红黑树上摘下(取消监听)
fd:
待监听的fd
event: 本质 struct epoll_event 结构体 地址
成员 events:
EPOLLIN / EPOLLOUT / EPOLLERR
成员 data: 联合体(共用体):
int fd; 对应监听事件的 fd
void *ptr;
uint32_t u32;
uint64_t u64;
返回值:成功 0; 失败: -1 errno
int epoll_wait(int epfd, struct epoll_event *events, int maxevents, int timeout); 阻塞监听。
epfd:epoll_create 函数的返回值。 epfd
events:传出参数,【数组】, 满足监听条件的 那些 fd 结构体。
maxevents:数组 元素的总个数。 1024
struct epoll_event evnets[1024]
timeout:
-1: 阻塞
0: 不阻塞
>0: 超时时间 (毫秒)
返回值:
> 0: 满足监听的 总个数。 可以用作循环上限。
0: 没有fd满足监听事件
-1:失败。 errno
实现思路
lfd = socket(); 监听连接事件lfd
bind();
listen();
int epfd = epoll_create(1024); epfd, 监听红黑树的树根。
struct epoll_event tep, ep[1024]; tep, 用来设置单个fd属性, ep 是 epoll_wait() 传出的满足监听事件的数组。
tep.events = EPOLLIN; 初始化 lfd的监听属性。
tep.data.fd = lfd
epoll_ctl(epfd, EPOLL_CTL_ADD, lfd, &tep); 将 lfd 添加到监听红黑树上。
while (1) {
ret = epoll_wait(epfd, ep,1024, -1); 实施监听
for (i = 0; i < ret; i++) {
if (ep[i].data.fd == lfd) { // lfd 满足读事件,有新的客户端发起连接请求
cfd = Accept();
tep.events = EPOLLIN; 初始化 cfd的监听属性。
tep.data.fd = cfd;
epoll_ctl(epfd, EPOLL_CTL_ADD, cfd, &tep);
} else { cfd 们 满足读事件, 有客户端写数据来。
n = read(ep[i].data.fd, buf, sizeof(buf));
if ( n == 0) {
close(ep[i].data.fd);
epoll_ctl(epfd, EPOLL_CTL_DEL, ep[i].data.fd , NULL); // 将关闭的cfd,从监听树上摘下。
} else if (n > 0) {
小--大
write(ep[i].data.fd, buf, n);
}
}
}

















 231
231

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









