



我之前演示过几个OpenManus的demo,其实也就是demo,包括manus,现在也就是demo阶段,复杂的plan和flow,现在的代码支撑和LLM的能力都有待改善,但是我们这期不是吐槽文章,是来把OpenManus给打开看看它的实现是怎么样的,其实Manus也都差不多,甚至OWL也都差不多,我们看一个就够了
其他的几个目录也没啥特别需要看的,就看app
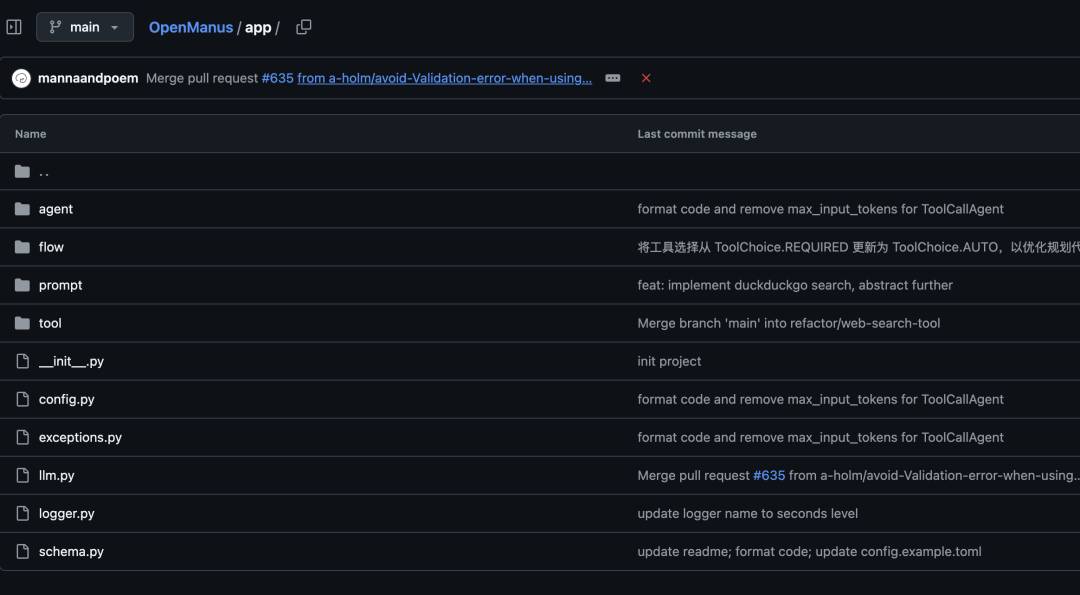
app里面有这么几个结构
1- agent 没啥好解释的
2- flow 就是来做multiagent的planning和管理任务框架的
3- prompt
都是这种形式,来定义系统提示词和agent的role
4- tool
纯纯干活的了

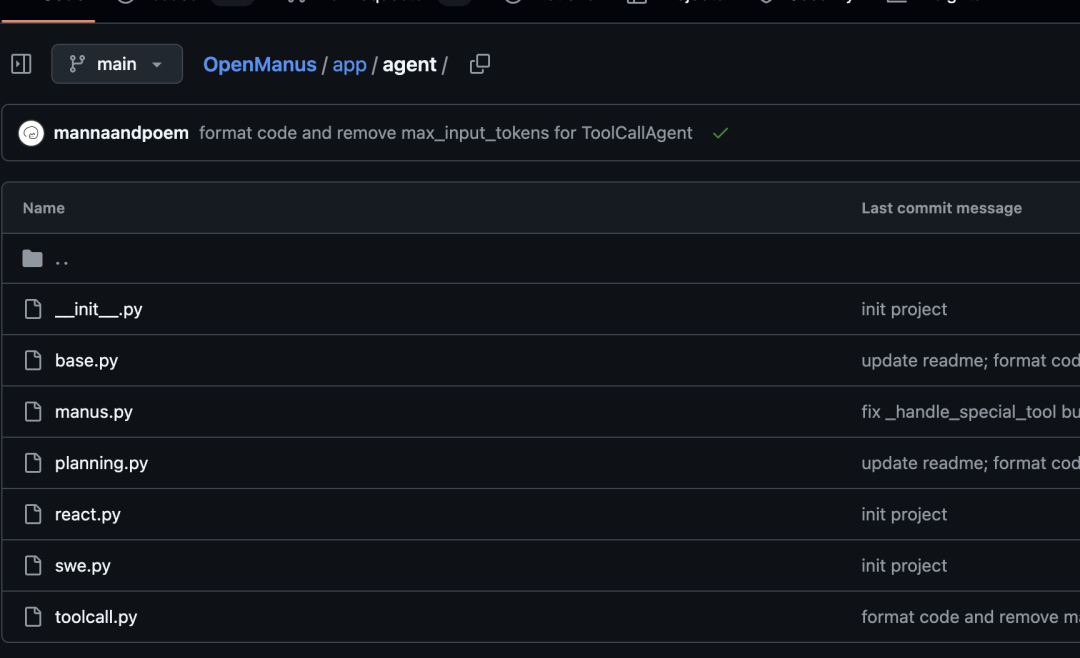
主要看最重要的目录agent
大概总体分这么几个agent
先看base:base.py 模块定义了抽象基类 BaseAgent,用于管理代理的状态、内存、执行循环(包括运行、步骤执行、卡住处理)和消息,并提供初始化和配置功能,为构建具有特定行为的代理提供基础框架。
在看planning:planning.py模块定义了PlanningAgent类,该代理通过PlanningTool和Terminate等工具创建、管理和执行任务计划。它具有初始化、计划创建(create_initial_plan)、思考(think)、行动(act)、计划状态更新(update_plan_status)、步骤跟踪(step_execution_tracker)等功能,并能根据工具执行结果动态调整计划,处理初始请求(run)并检索当前计划状态(get_plan)。
然后是 react.py:react.py模块定义了继承自BaseAgent的抽象类ReActAgent,它通过think(思考,决定下一步行动) 和act(执行行动) 两个抽象方法(需子类实现)以及step方法(整合think和act)来处理和执行任务,并提供基础的任务处理框架。
swe和tool就是 指从code和tool了
manus.py:manus.py模块定义了Manus类,一个继承自ToolCallAgent(实际上你前面提到了继承自 PlanningAgent, 请确认是哪个) 的通用智能代理。Manus具有预定义的名称、描述、系统提示、步骤限制(max_observe,max_steps),并利用包含PythonExecute、WebSearch、BrowserUseTool、FileSaver和Terminate等工具的available_tools集合来执行各种任务,并通过_handle_special_tool方法处理(如清理)BrowserUseTool的结果。
好的,我们来梳理一下这些代码的调用逻辑。这里涉及到多个Agent类(BaseAgent,ReActAgent,ToolCallAgent,PlanningAgent,SWEAgent,Manus),以及它们之间的继承关系和方法调用。我用文字描述,并结合伪代码(因为好解释
)来表示调用流程。
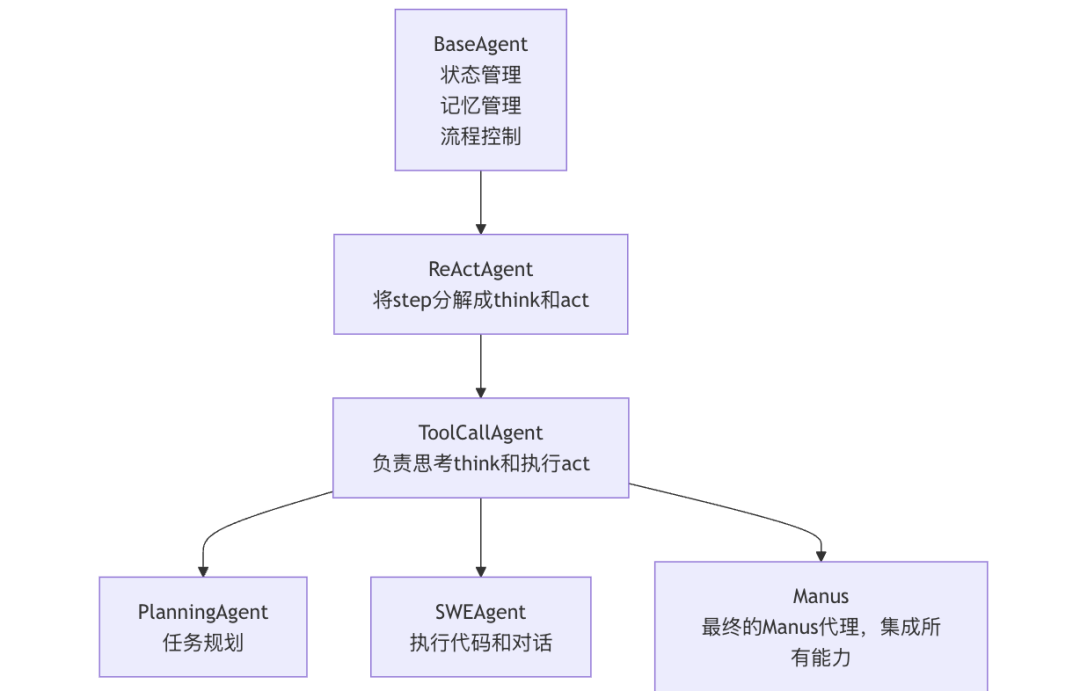
1. 总体继承关系:
BaseAgent (抽象基类)
└─ ReActAgent (抽象基类)
└─ ToolCallAgent
├─ PlanningAgent
├─ SWEAgent
└─ Manus
2.BaseAgent(核心基类):
-
核心方法:
-
__init__: 初始化Agent的基本属性(name, description, llm, memory, state, max_steps等)。
-
initialize_agent: 使用model_validator在对象创建后进行进一步初始化(设置默认的LLM和Memory)。
-
state_context: 一个异步上下文管理器,用于安全地更改Agent的状态(IDLE, RUNNING, ERROR等)。
-
update_memory: 将消息添加到Agent的内存中。
-
run: Agent的主执行循环。它会循环调用step()方法,直到达到max_steps或状态变为FINISHED。
-
step:抽象方法,必须由子类实现。执行Agent的单个步骤。
-
is_stuck: 检查智能体是否卡住。
-
handle_stuck_state: 处理卡住的状态。
-
messages: 属性,用于获取和设置消息。
-
-
调用流程 (以run方法为例):
async run(request):if state != IDLE:raise RuntimeErrorif request:update_memory(USER, request)async with state_context(RUNNING):while current_step < max_steps and state != FINISHED:current_step += 1step_result = await step() # 调用子类的 step() 方法if is_stuck():handle_stuck_state()results.append(step_result)if current_step >= max_steps:state = IDLEresults.append("Terminated: Reached max steps")return "\n".join(results)
3.ReActAgent(ReAct模式的基类):
-
继承自:BaseAgent
-
核心方法:
-
think:抽象方法,由子类实现。思考下一步行动。
-
act:抽象方法,由子类实现。执行行动。
-
step: 实现了BaseAgent的step方法。依次调用think()和act()。
-
-
调用流程 (以step方法为例):
4.ToolCallAgent(支持工具调用的Agent):
async step():should_act = await think() # 调用子类的 think()if should_act:return await act() # 调用子类的 act()else:return "Thinking complete - no action needed"
-
继承自:ReActAgent
-
核心方法:
-
__init__: 初始化工具相关的属性 (available_tools, tool_choices, special_tool_names, tool_calls等)。
-
think: 根据当前状态和可用工具,决定是否调用工具。使用LLM进行决策。
-
act: 执行工具调用,并处理工具的输出。
-
execute_tool: 执行具体的工具调用。
-
_handle_special_tool: 处理特殊工具。
-
-
调用流程 (以think和act为例):
async think():# ... (准备消息和工具信息) ...response = await llm.ask_tool(...) # 让LLM决定是否调用工具,以及调用哪个工具if response.tool_calls:self.tool_calls = response.tool_callsreturn True # 需要执行工具else:return Falseasync act():if self.tool_calls:tool_call = self.tool_calls.pop(0) # 取出第一个工具调用result = await execute_tool(tool_call)await _handle_special_tool(tool_call.function.name,result) # 如果是特殊工具,则处理。update_memory(TOOL, result, tool_call_id=tool_call.id)return resultelse:return "No tool to execute"
5.PlanningAgent(规划型Agent):
-
继承自:ToolCallAgent
-
核心方法:
-
initialize_plan_and_verify_tools: 初始化计划ID并验证是否有PlanningTool。
-
think: 获取当前计划状态,并让LLM决定下一步行动(包括是否调用工具)。
-
act: 执行工具调用,并更新计划状态。
-
get_plan: 获取当前计划。
-
create_initial_plan: 根据用户请求创建初始计划。
-
update_plan_status: 根据工具执行结果更新计划步骤的状态。
-
_get_current_step_index: 获取当前计划中第一个未完成步骤的索引。
-
-
调用流程 (更详细,以run->think->act为例):
async run(request):if request:await create_initial_plan(request)return await super().run() # 调用 ToolCallAgent.run() -> ReActAgent.run() -> BaseAgent.run()async create_initial_plan(request):# 1. 构造消息,让 LLM 创建计划messages = [...]response = await llm.ask_tool(..., tool_choice=ToolChoice.AUTO)# 2. 处理 LLM 的响应,提取工具调用(应该是 planning 工具的调用)for tool_call in response.tool_calls:if tool_call.function.name == "planning":result = await execute_tool(tool_call) # 执行 planning 工具# 3. 将工具执行结果(计划)存入内存update_memory(TOOL, result, tool_call_id=tool_call.id)async think():prompt = f"CURRENT PLAN STATUS:\n{await self.get_plan()}\n\n{self.next_step_prompt}"self.messages.append(Message.user_message(prompt))self.current_step_index = await self._get_current_step_index()result = await super().think() # 调用 ToolCallAgent 的 think()if result and self.tool_calls:# 记录工具和步骤的关联latest_tool_call = self.tool_calls[0]if latest_tool_call 不是 planning tool 且 不是 special tool:self.step_execution_tracker[latest_tool_call.id] = {"step_index": self.current_step_index,"tool_name": latest_tool_call.function.name,"status": "pending"}return resultasync act():result = await super().act() # 调用 ToolCallAgent 的 act()if self.tool_calls:latest_tool_call = self.tool_calls[0]if latest_tool_call.id in self.step_execution_tracker:self.step_execution_tracker[latest_tool_call.id]["status"] = "completed"self.step_execution_tracker[latest_tool_call.id]["result"] = resultif latest_tool_call 不是 planning tool 且 不是 special tool:await self.update_plan_status(latest_tool_call.id)return resultasync update_plan_status(tool_call_id):# 1. 检查 tool_call_id 是否在 tracker 中,以及状态是否为 completed# 2. 调用 planning 工具的 mark_step 命令,将对应步骤标记为 completedasync _get_current_step_index():# 1. 获取当前计划 (文本)# 2. 解析计划文本,找到第一个 [ ] 或 [→] 的步骤# 3. 调用 planning 工具的 mark_step 命令,将当前步骤设置为 in_progress# 4. 返回步骤索引
6.SWEAgent(软件工程师Agent):
-
继承自:ToolCallAgent
-
核心方法:
-
think: 更新工作目录,并使用格式化的next_step_prompt。然后调用父类的think。
-
-
调用流程 (以think为例):
async think():self.working_dir = await self.bash.execute("pwd") # 获取当前工作目录self.next_step_prompt = self.next_step_prompt.format(current_dir=self.working_dir) # 更新提示return await super().think() # 调用 ToolCallAgent 的 think()
7.Manus(通用Agent):
-
继承自:ToolCallAgent
-
特点:拥有更广泛的工具集 (PythonExecute, WebSearch, BrowserUseTool, FileSaver, Terminate)。
-
_handle_special_tool: 重写此方法,处理BrowserUseTool的清理工作。
那么好,我们总结一下:
-
BaseAgent提供了Agent的基本框架和执行循环。
-
ReActAgent引入了 "思考-行动" 模式。
-
ToolCallAgent增加了工具调用的能力。
-
PlanningAgent、SWEAgent和Manus是ToolCallAgent的具体实现,分别针对不同的任务类型。
-
调用逻辑主要通过继承和重写think、act和step方法来实现。
-
PlanningAgent具有更复杂的内部状态管理,用于跟踪计划的执行。
画出来就是下图这样
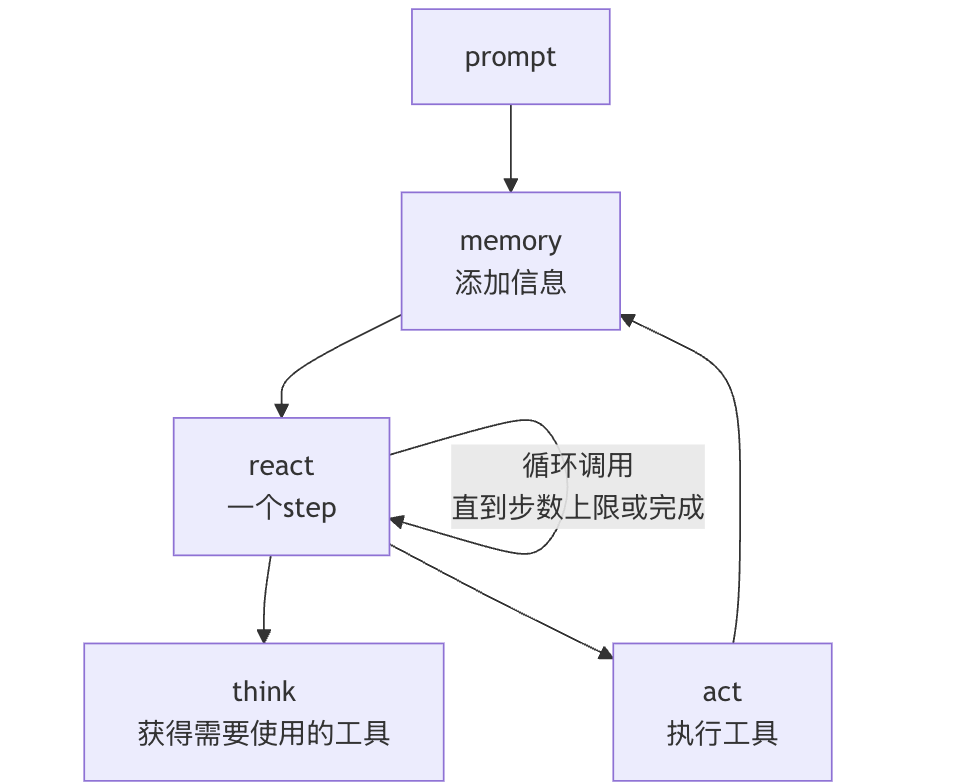
总体调用的抽象感觉就是下图这样
好了今天这节课就解释到这,大家可以结合我的解释自己去run一下代码,甚至自己按着这个逻辑来新写一套multi-agents的框架也不是特别难的事
那么就到这里,再见吧!


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









