



一种用于无线传感器网络的新型距离向量跳数定位方法
1 引言
智能且经济高效的设备提供了传感和射频功能,改变了传统的网络服务。例如,在医疗系统、战场、环境以及监控领域等多种应用中使用的无线传感器网络(WSN)。在这些网络中部署了小型而智能的传感器节点,用于监测特定区域或范围。尽管具备这些特性,但这些网络有一个共同的关键点,即传感器位置的重要性。在部署这些节点时,位置参考通常通过手动设置,或通过使用距离和全球定位系统(GPS)服务来计算位置[1,2]。然而,GPS服务消耗大量能量且成本较高。自定位是另一种方法,节点通过定位方法获取自身位置。位置信息需要识别事件发生的位置、附近设备的信息以及网络覆盖率情况。准确的位置信息在无线传感器网络应用中起着至关重要的作用[3]。目前存在多种类型的定位方法,如目标或基于源的定位、自定位以及基于距离或非基于距离的定位。在第一种定位类型中,节点监测区域并追踪所需动物、人员或机器的位置[4]。
已使用不同类型的方法进行此类定位,例如基于衰减模型的定位和与模型无关的定位。基于衰减的定位方法计算距离和接收信号强度。然而,这些方法存在鞍点和局部最优问题。
无线传感器网络(WSN)已经彻底改变了传统的网络服务,被广泛应用于医疗系统、战场、环境和监控领域。在这些网络中部署的传感器节点用于监测特定区域,而精确的位置信息在无线传感器网络应用中起着至关重要的作用。然而,传统的定位参考方法(如GPS服务)成本高昂且消耗大量能量。因此,定位技术应运而生,使节点能够通过基于距离和无距离测量技术等不同方法获取自身位置。通过使用接收信号强度指示(RSSI)和到达时间差(TDOA)技术,以及在局部地图内采用无锚点方法获取位置信息,定位技术有助于解决能量消耗和成本问题。定位算法的目标是在最短的时间内实现定位。本文重点讨论适用于无线传感器网络的不同定位技术和算法。
文献中提出了多种用于节点位置检测的定位技术。锚点节点(ANs)也被用来估计目标节点的精确位置,但需要预先部署。在无线传感器网络中,主要目标是以最短的时间实现定位。此外,定位算法还分为两大类:基于距离和无距离测量技术[5]。在基于距离的技术中,只要节点位于通信范围内,传感器节点之间的距离信息就可获得。距离信息通过接收信号强度指示和到达时间差来获取[6]。这些技术进一步分为使用锚节点和不使用锚节点两类,其中锚’节点利用地理定位信息。无锚节点技术则通过局部地图获取位置信息。还有一些其他服务应用于室内和室外网络,如水下传感器网络。基于距离的定位技术依赖于地理定位或一组已知的位置信息,采用三角测量、三边测量以及鲁棒四边形连接信息[7]。这些方法属于位置确定的几何技术。
复杂的定位技术消耗更多的处理能力,导致能量消耗和节点耗尽问题。定位技术应通过使用较少的计算资源来实现节能,并解决无线传感器网络中的源定位问题。在此背景下,已有不同的研究工作致力于利用优化方法[8,9]设计用于无线传感器网络的节能型定位方法。这些优化算法用于解决定位问题并估计源位置。然而,这些方法依赖于在无线传感器网络中的传感器节点间传播的精确测量信息。广播此类精确信息需要较高的计算资源并消耗更多能量。另一方面,还提出了一些唤醒机制,以激活一系列节点来估计网络中节点的位置信息。因此,有必要设计一种更节能的无线传感器网络定位方法。本文提出了用于无线传感器网络定位的距离向量跳数定位方法(DVHLM)。本文的其他目标如下:
- 为无线传感器网络设计定位方法。
- 在位置信息共享过程中最小化计算处理。
- 在无线传感器网络中提供成本效益高、低开销的定位服务。所提出工作的主要贡献如下:
- 所提出的DVHLM结合了三边测量和粒子群优化(PSO)技术,用于估计无线传感器网络中未知或位置偏移节点的位置。
- 该方法包括四个步骤:坐标计算、距离计算、未知节点位置估计和估计校正。
- 该提出的方法优于现有方法,实现了更高的定位精度和减少的误差,为无线传感器网络领域做出了有价值的贡献。
本文其余部分组织如下:第2节介绍了该领域的相关工作。第3节阐述了所提出方案的设计与开发阶段。第4节讨论了实验结果以及所提出方案与最先进的解决方案的对比。最后一节总结了全文并提出了未来方向。
2 DVHLM
距离矢量跳数定位方法(DVHLM)是一种用于无线传感器网络(WSNs)的分布式定位算法,无需测距信息。该概念最初由美国罗格斯大学的德拉戈斯·尼库列斯库等人首次提出[1]。此后,大量科学研究致力于改进DVHLM算法以提高精度。此外,[2]还研究了降低DV‐Hop错误率的理想信标节点间距。该技术主要有两个作用:一是减少信标节点计算的平均单跳距离中的错误率,二是在整个网络中调整该距离。因此,采用最小二乘法来确定未知节点的坐标。其他研究则探讨了利用距离误差和估计距离误差的加权平均值来校正原始平均跳距[3]。
采用指数与对数递减权重来改进粒子群权重。在累积各个节点权重后,每个信标节点都被考虑用于计算平均跳距。主节点被简要描述,重点关注网络拓扑结构,并在局部与全局特征之间实现有效平衡。实际上,一些研究采用了改进的粒子群优化(PSO)算法,通过改变传统的估计方法来估算节点距离以实现节点定位[4]。
通过引入跳数阈值来控制信标节点的广播信息范围,从而将信息分布限制在特定范围内[5]。此外,通过包含每个信标节点的平均距离误差来调整每个锚节点的平均距离。同时,将当前定位轮次中的未知节点提升为下一轮定位中的新锚节点。多通信半径方法被用于确定节点之间的跳数。需要指出的是,在计算未知节点的平均跳距时,已忽略孤立节点。因此,来自信标节点的平均跳距随后被加权并归一化,以提高未知节点的定位精度[6]。最后,一些研究通过利用不同的平均跳距来处理未知节点与信标节点之间距离的计算问题。银河群优化思想将网络中的信标节点划分为多个物种。在每个种群中,采用粒子群优化算法对未知节点进行局部优化。类似地,加权质心算法也被用于局部优化,以确定未知节点的坐标[7]。近年来,无线传感器网络定位领域中一种具有前景的技术是DVHLM算法。其可扩展性使其特别适用于大规模网络。通过引入多种校正技术和优化算法,研究人员已显著提高了其精度并降低了定位误差。可以预见,随着进一步的研究和发展,DVHLM算法有望成为无线传感器网络中广泛应用且高度精确的定位方法。
3 相关工作
扎伊迪等人[10]提出了一种用于无线传感器网络的无测距定位方法。通常,无线传感器网络是固定的和静态的,而该方法则是为基于移动性的网络设计的。未知节点定位通过估计方法及其本地可用信息来确定。该方法能够处理不必要的开销和能量消耗问题,特别是在节点交换其位置信息时。该方法采用两步定位方法,其中首先评估普通节点的初始估计并广播信息。在第二步中,使用相关机制来检查节点的移动性,以提高节点的精度。即使在存在节点移动性影响的情况下,该方法在精度方面也表现更优。然而,该方法未考虑一些重要因素,如干扰和无线电不规则性。
坎瓦尔和库马尔[11]提出了一种基于距离向量跳数协议的无线传感器网络定位框架。该框架专为位移的传感器节点设计。还采用了粒子群优化技术来识别网络中的真实场景节点。所提出的框架通过利用跳数大小来减少锚节点与未知节点之间的通信开销。位置估计仅针对位移节点进行,从而降低了无线传感器网络中的计算和定位时间。未知节点的位置始终是一个消耗大量能量、计算资源的重要问题。实验结果表明,与现有框架相比,所提出框架在时间、能量消耗和定位误差方面表现出更优的性能。
夏尔马和辛格[12]提出了一种未知节点定位方法,通过使用RSSI方法来估计传感器位置。通常,无线传感器网络中的定位估计会使用全球定位系统服务,但这会在无线传感器网络中产生一定的开销、处理复杂性和能量消耗。该方法采用了射频、发射功率和节点方向三个参数进行距离估计。提出的方法针对医疗领域设计,无需任何额外设备或要求。实验结果表明,该方法在定位精度和复杂性方面表现出更优的性能。然而,无线网络基于实时数据环境,而所提出的方法则基于一种估计策略。
辛格和夏尔马[13]提出了一种利用遗传算法改进的无测距定位方法。作者修改了锚节点的平均跳数,并借助搜索算法利用相关因子和跳数大小进行优化。该方法减少了由ANs或共面引起的位置误差。同时采用遗传算法提高定位精度。提出的方法在仿真中进行了评估,评估指标包括定位误差、精度、误差方差和覆盖率。仿真结果表明,与最先进的方法相比,该方法降低了定位误差并提高了定位精度。然而,由于存在空洞、网络稀疏性和节点分布不均匀导致的多重各向异性,该方法的性能有所下降。
考尔等人[14]通过使用改进的变体,提出了两种受自然启发的解决方案,包括二维和三维无线传感器网络。第一种算法采用灰狼优化技术以实现更优的估计。该方案通过估算每跳平均距离来搜索每跳的平均距离。对每个节点采用权重方法进行加权平均计算,并分析各类锚节点影响。该方案的基本思想是提高无线传感器网络中的定位精度。仿真结果表明,与现有方案相比,所提出方案具有更优性能。然而,此类方案存在高精度和计算成本较高的问题。
沙赫扎德等人[15]讨论了基于锚点的无测距定位算法,并计算了最大跳数的最优值以确定节点位置。该算法采用了先驱距离向量跳数算法。此方案专为物联网和无线传感器网络设计,其中定位信息是重要影响因素之一,特别是针对各向异性网络。所提出方案的基本目标是降低复杂性和计算开销。该算法通过多种拓扑结构进行仿真评估,以检验多个各向异性因素(如障碍物、稀疏且非均匀的传感器分布以及其他不规则无线电传播模式)的影响。此外,还从计算开销、能量消耗和通信成本方面对所提出算法进行了评估。然而,仅当信标根据位置被选中时才应用最优值,否则予以舍弃。表1展示了所讨论研究的对比分析。
4 提出的方法
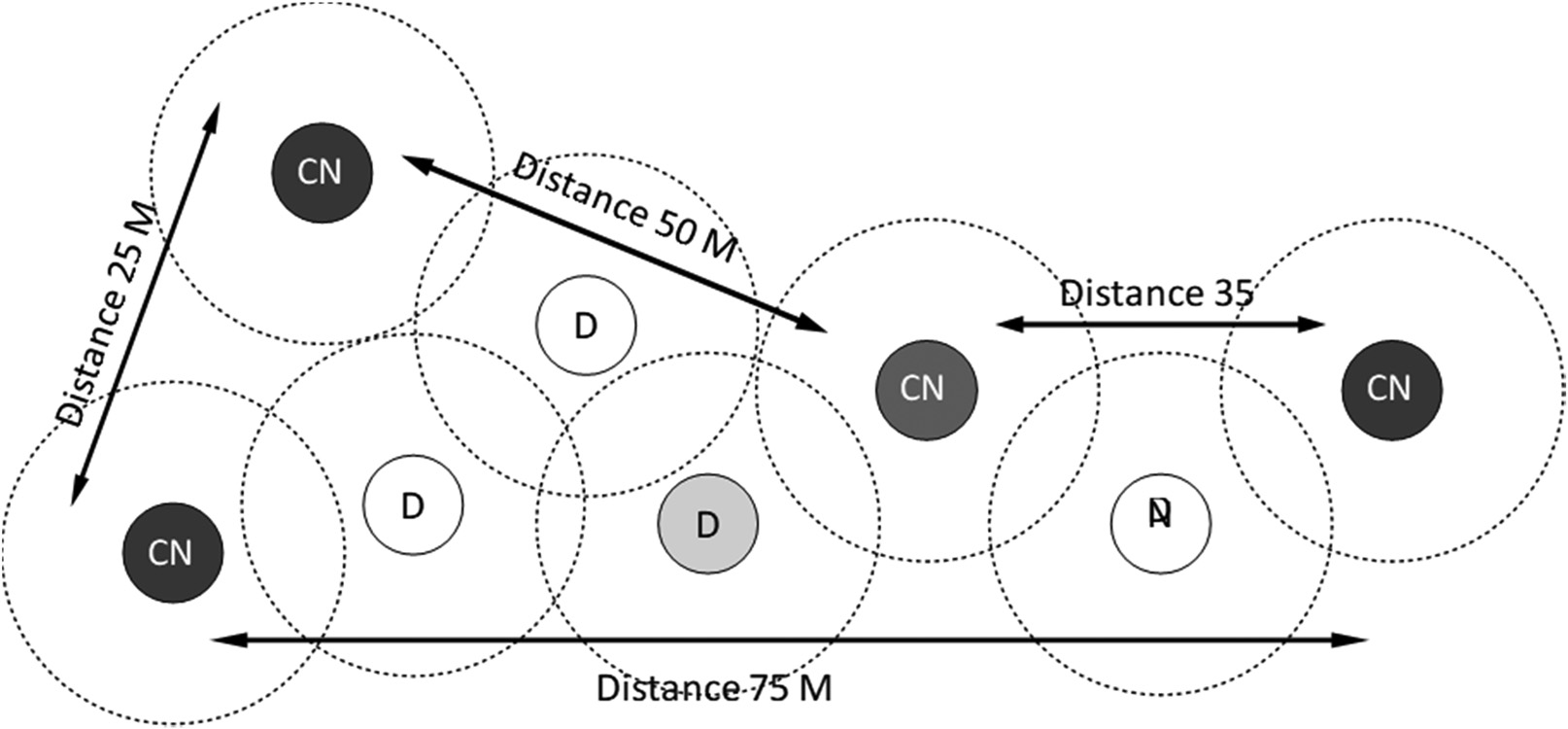
提出的方法利用DVHLM来确定传感器节点之间的距离。这些传感器节点为未知节点或ANs。该方法通过将节点间的距离乘以跳数来进行计算。此过程包含四个主要步骤:坐标计算、距离计算、未知节点位置的估计以及估计校正。节点的坐标计算通过使用GPS服务完成,节点通过该服务传播位置信息,并将给定信息发送给邻近节点。该服务是许多研究人员采用的一种众所周知的方法,例如Mao等人[16,17]的研究中所使用的。在此过程之后,下一步是计算节点之间的实际距离。该过程通过计算从源节点到目标节点的所有距离来完成。未知节点位置的计算是另一个重要因素,协议使用三边测量法[18]。在三角测量法中,采用三角形的几何特性来估计位置信息。最后一步是节点位置的估计与校正,此处采用粒子群优化[19]。粒子群优化基于鸟’群飞行技术,可改变每个粒子的速度[13]。所提出方案的完整过程将在下一小节中讨论。图1展示了网络中节点的计算。
如图1所示,候选节点(CN)为1、2、3和4,而网络中的其他节点为位移节点(DN)。CN1与CN2之间的距离为25米,CN2与CN3之间为50米,CN3与CN4之间为35米,CN1与CN4之间的距离为75米。灰色轮廓表示每个节点的通信范围,黄色AN用于表示未知节点,展示该节点分别从CN1、CN2、CN3和CN4估计到中心节点(CN)的最小跳数的过程。
4.1 网络设计
为了测试所提出方案,我们设置了一个网络,其中传感器节点被随机部署在120 × 120m²的区域内。我们在该区域内部署了多个传感器节点,并将其分为稳定节点和不稳定节点。稳定节点位于其确切位置,而不稳定节点则偏离了其原始位置。所提出方案的主要目标是估计网络中不稳定或发生位移的节点。位移节点的位置由候选节点(CN)进行估计。通过选择一定数量的候选节点(CN)来估计未知节点的位置。
4.2 定位过程
所提出方案基于不同的流程,例如候选节点的选择及其坐标计算。在完成该计算后,信息将在网络中广播。每个节点的初始值设为零,在广播过程中其值变为一,以获得最小的节点数量值。位移节点通过利用中心节点的数量以及中心节点之间的距离信息来计算与中心节点的距离。公式(1)用于中心节点的距离计算。
$$
Distance_{ACN} = \frac{\sum_{i \neq j} Distance_{Des}}{Hop_{CN,DN}}
$$
(1)
其中,CN表示选定的候选节点,而选定的CN A与CN之间的估计距离按公式(2)计算。
$$
Distance_{True}^{ACN} = Distance \times Hop_{ACN}
$$
(2)
所选中心节点A和CN之间的真实距离由以下公式给出
$$
Des_{True}^{ACN} = \sqrt{(x_A - x_{CN})^2 + (y_A - y_{CN})^2}
$$
(3)
完成此计算后,CN之间的误差表示为
$$
Error_{CN} = |Des_{ACN} - Des_{True}^{ACN}|
$$
(4)
完成这些计算后,位移节点可以计算其到所选中心节点的距离。提出的定位方法的流程图如图2所示。
5 实验结果
在本研究中,我们旨在通过仿真实验评估所提出的方法在无线传感器网络定位中的性能。为了确保结果的准确性和可靠性,我们精心设计了仿真设置并选择了合适的参数。首先,我们将仿真区域设置为 200 × 200 m²,这是以往无线传感器网络定位研究中常用的设置。选择这一参数的目的是为无线传感器网络的部署提供一个真实的场景,并确保节点在网络中均匀分布。其次,我们将需要估计位置的候选节点数量在10到50之间变化,将位置已知并用作参考点的错位节点数量在100到300之间变化。该范围内的候选节点和错位节点数量在许多实际的无线传感器网络应用中具有代表性。
此外,我们将传输范围设置为30米,这是评估定位算法性能的关键参数。传输范围决定了两个节点之间可以相互通信的最大距离,因此它会影响定位过程的精度和效率。此外,我们选择数据包大小为20字节,这在许多无线传感器网络应用中是常用的。数据包大小至关重要,因为它决定了节点之间可以交换的信息量,这对于距离测量和定位计算是必要的。最后,我们进行了一系列全面的仿真,以评估提出的方法的性能。我们改变了节点数量、节点分布、传输范围和数据包大小等参数,以确保结果可靠并可推广到不同场景。其他仿真参数见表2。
对所提出的协议的评估通过多个实验进行,以研究已知传感器密度、未知传感器节点密度以及阴影效应对定位误差的影响。第一个实验重点分析已知传感器节点密度对定位误差的影响。该实验在100个位置未知的传感器节点条件下进行,已知节点的密度从500逐步增加到700,仿真共运行10次,并对结果进行了分析。

图3展示了实验结果,描绘了不同数量的定位节点的定位误差百分比。研究结果表明,在已知传感器密度变化的情况下,所提出的DVHLM方法在定位误差方面优于到达角(AOA)和接收信号强度指示定位技术。此外,结果还显示,当传感器节点密度达到700个已知传感器节点时,接收信号强度指示比到达角(AOA)更可靠。图3展示了已知节点的定位误差,并进一步证实了这些发现。此外,为了评估未知传感器节点密度对定位误差的影响,在保持已知传感器节点密度不变的情况下,通过改变未知传感器节点的数量对所提出的协议进行了测试。结果表明,未知节点密度的增加会导致定位误差成比例增加。同时,还评估了阴影效应对所提出的协议的影响。结果表明,随着阴影效应的增强,定位误差也随之增加。
我们评估了未知传感器节点密度对定位误差的影响。仿真在一个包含约5,000个已知节点的兴趣区域内进行,未知节点的密度从100增加到1,000个节点。仿真重复进行了十次,每次运行中记录成功定位的未知节点数量。图4展示了随着未知节点密度增加,定位误差百分比的结果。该图表明,提出的DVHLM方法在定位精度方面优于到达角(AOA)和接收信号强度指示定位技术。结果还显示,在由已知传感器节点完全覆盖的兴趣区域内,定位精度更优。
此外,结果表明所提出的方法对未知节点密度的增加更具鲁棒性。可以观察到,即使未知节点密度较高,DVHLM的定位误差百分比也相对稳定,而到达角(AOA)和接收信号强度指示定位技术的误差随密度增加而上升。这种行为可归因于DVHLM利用跳数,而跳数相对于网络中节点的密度较为不敏感。图4显示了未知传感器节点的定位误差百分比。结果表明,提出的DVHLM方法优于到达角(AOA)和接收信号强度指示定位方法。该图显示,随着未知节点密度的增加,所有方法的定位误差百分比也随之增加。然而,与到达角(AOA)和接收信号强度指示方法相比,提出的DVHLM方法具有更低的定位误差百分比,表明其在应对未知节点密度增加方面性能更优。

在图5中,展示了阴影效应对定位误差的影响。为了进行此实验,仿真设置使用了7,000个已定位节点和70个错位节点。阴影效应从0m增加到100,分析了提出的DVHLM方法。在每次仿真运行中,利用已定位节点统计了错位传感器节点成功定位的数量,并以阴影百分比的形式记录结果。实验结果表明,提出的DVHLM方法在定位误差方面优于RSSI和到达角(AOA)技术。提出的方法性能最佳,而AOA是第二好的方法。这些结果与之前实验的结果一致(表3)。
总体而言,详细的实验表明,提出的DVHLM方法在已知节点的定位误差、错位节点的定位误差以及阴影效应下的定位误差方面均表现出更优的性能。这些结果充分证明了该方法在无线传感器网络中能够有效实现传感器节点的精确定位。
6 讨论
在我们的研究论文中,我们对所提出的DVHLM进行了全面的评估,并将其性能与最先进的定位方法进行了比较。我们的评估包括一系列指标,如定位精度、定位误差和计算复杂度。关于我们提出的模型的性能增强方面值得指出:本方法结合了三边测量和粒子群优化等成熟技术来估计未知节点的位置。三边测量通过计算未知节点与多个ANs之间的距离来确定其位置。我们的方法利用粒子群优化(PSO)提高了三边测量的精度,PSO是一种强大的优化算法,可优化节点的位置估计。此外,我们的方法引入了距离矢量跳转,通过节点间的通信获取距离信息,用于估计未知节点的位置。该技术减少了定位过程中所需的已知节点数量,并提升了定位过程的整体精度。
所提出的DVHLM对实时无线传感器网络(WSNs)具有重要意义。该方法结合了三边测量和粒子群优化(PSO)等技术来估计未知节点的位置,从而提高了定位过程的精度。此外,引入距离矢量跳转减少了定位所需的已知节点数量,并提升了整个定位过程的准确性。所提出方案可应用于多种实时场景,如环境监测、精准农业和军事应用。它可用于定位网络中位置错误的节点,并提升整体网络性能。此外,所提出方案还能降低定位过程的计算复杂度,这在实时网络中是一个关键因素。因此,该方案预计将对实时无线传感器网络(WSNs)产生重大影响。未来的研究可进一步探索该方案在实际场景中的潜在应用与影响。
提出的方法的精度取决于可用ANs的数量及其在网络中的布置。基于三边测量的方法在ANs数量减少且节点之间距离较远时,精度会降低。因此,在ANs数量较少或ANs相距较远的情况下,提出的方法可能表现不佳。该方法依赖于节点之间的距离测量,而这些测量可能受到信号干扰(如衰落或衰减)的影响,导致距离测量不准确,从而造成节点定位错误。提出的方法涉及复杂的计算,包括三边测量和粒子群优化。因此,对于处理能力与内存有限的资源受限设备而言,该方法可能不可行。
7 结论
本文提出了一种用于无线传感器网络(WSNs)中定位的DVHLM方法。该方法适用于需要实时定位且节点位置可能发生错位并需特别关注的场景。所提出的方法包含四个主要步骤:坐标计算、距离计算、错位节点位置估计以及估计校正。粒子群优化(PSO)技术被用于候选节点的选择及其坐标计算。所提出的DVHLM方法与到达角(AOA)和接收信号强度指示(RSSI)定位方法进行了性能比较。在已知节点的定位误差、错位节点的定位误差以及阴影效应下的定位误差方面,该方法取得了更好的结果。未来,我们将对所提出的方法进行误差估计,并将其与更多最先进的定位方法进行比较。
| 表3:比较定位方法 | 定位误差(米) |
|---|---|
| 提出的方法 | 3.5 |
| DV‐Hop | 4.0 |
| 多维缩放(MDS) | 4.2 |
| 无测距定位算法(RFLA) | 4.5 |
| 接收信号强度指示(RSSI) | 5.0 |
| AoA | 6.5 |


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









