




模板匹配(Template Match)
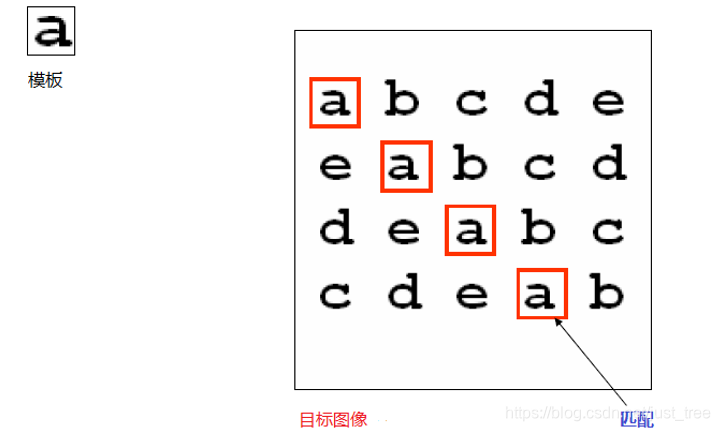
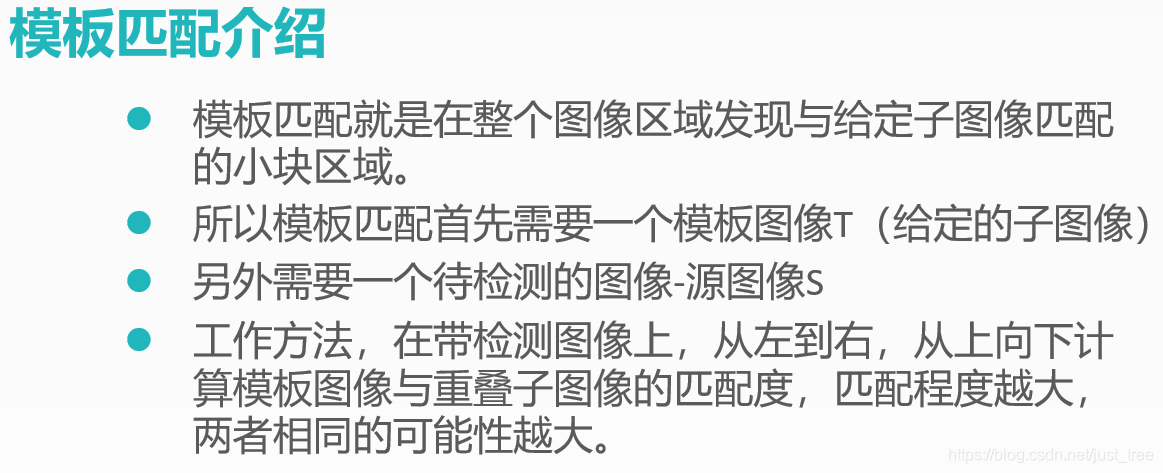
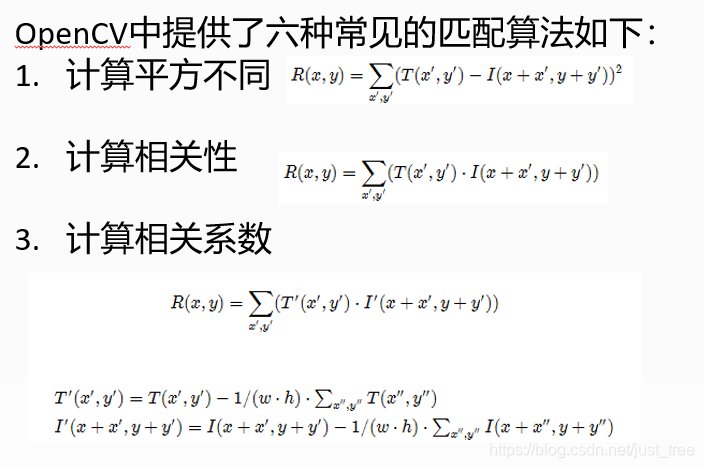
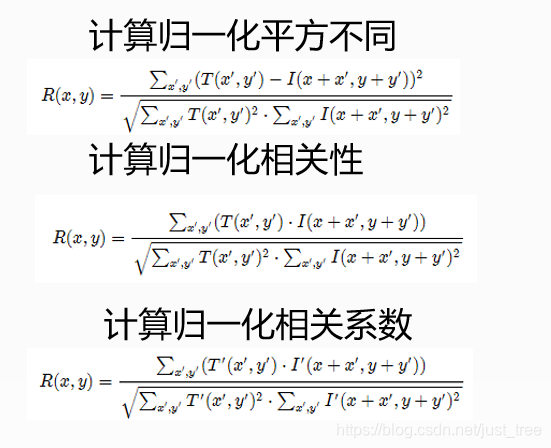
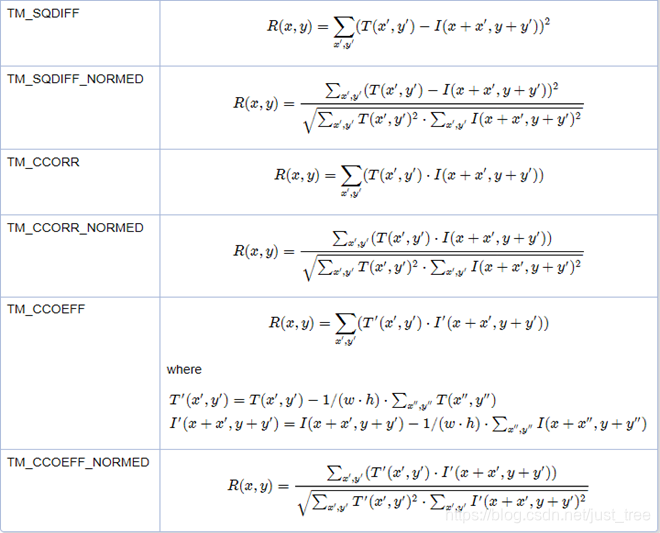
六种方法介绍:
#include <opencv2/opencv.hpp>
#include <iostream>
#include <opencv2/highgui/highgui.hpp>
#include <math.h>
using namespace std;
using namespace cv;
Mat src, temp, dst;
int match_method = TM_SQDIFF;
int max_track = 5;
const char* INPUT_T = "temp image";
const char* OUTPUT_T = "result image";
const char* match_t = "template match-demo";
void Match_Demo(int, void*);
int main(int argc, char** argv) {
// 待检测图像
src = imread("E://VS-pro//images//zhu2.jpg");
// 模板图像
temp = imread("E://VS-pro//images//zhu2temp.bmp");
if (src.empty() || temp.empty()) {
printf("could not load image...\n");
return -1;
}
namedWindow(INPUT_T);
namedWindow(OUTPUT_T);
namedWindow(match_t);
imshow(INPUT_T, temp);
//trackbar 变化的是 不同的匹配方法 从0到5共6种
const char* trackbar_title = "Match Algo Type:";
createTrackbar(trackbar_title, OUTPUT_T, &match_method, max_track, Match_Demo);
Match_Demo(0, 0);
waitKey(0);
return 0;
}
void Match_Demo(int, void*) {
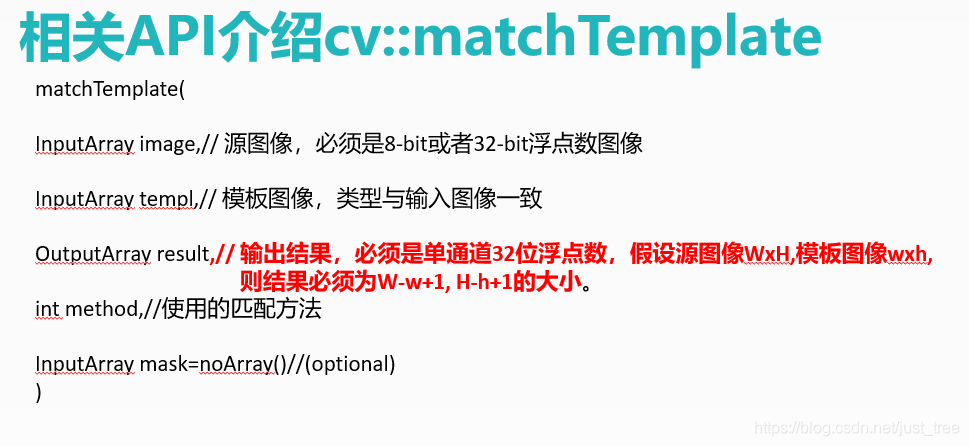
//放结果 MAT 必为单通道32位浮点数 结果必须是 (src.cols - temp.rows + 1) * (src.cols - temp.rows + 1)
int width = src.cols - temp.cols + 1;
int height = src.rows - temp.rows + 1;
Mat result;
result.create(Size(width, height), CV_32FC1);
//进行模板匹配以及归一化
matchTemplate(src, temp, result, match_method, Mat());
normalize(result, result, 0, 1, NORM_MINMAX, -1, Mat());
Point minloc;
Point maxloc; //放result中点的位置
double max, min; //存放result中值的大小
Point temloc;
src.copyTo(dst);
//minMaxLoc寻找矩阵(一维数组当作向量,用Mat定义) 中最小值和最大值的位置.
//用minMaxLoc寻找result中最可能的结果;
minMaxLoc(result, &min, &max, &minloc, &maxloc, Mat());
//若匹配方法为0 1 则最小值为最匹配结果 其余则最大值为最匹配结果
if (match_method <= 1)
{
temloc = minloc;
}
else
{
temloc = maxloc;
}
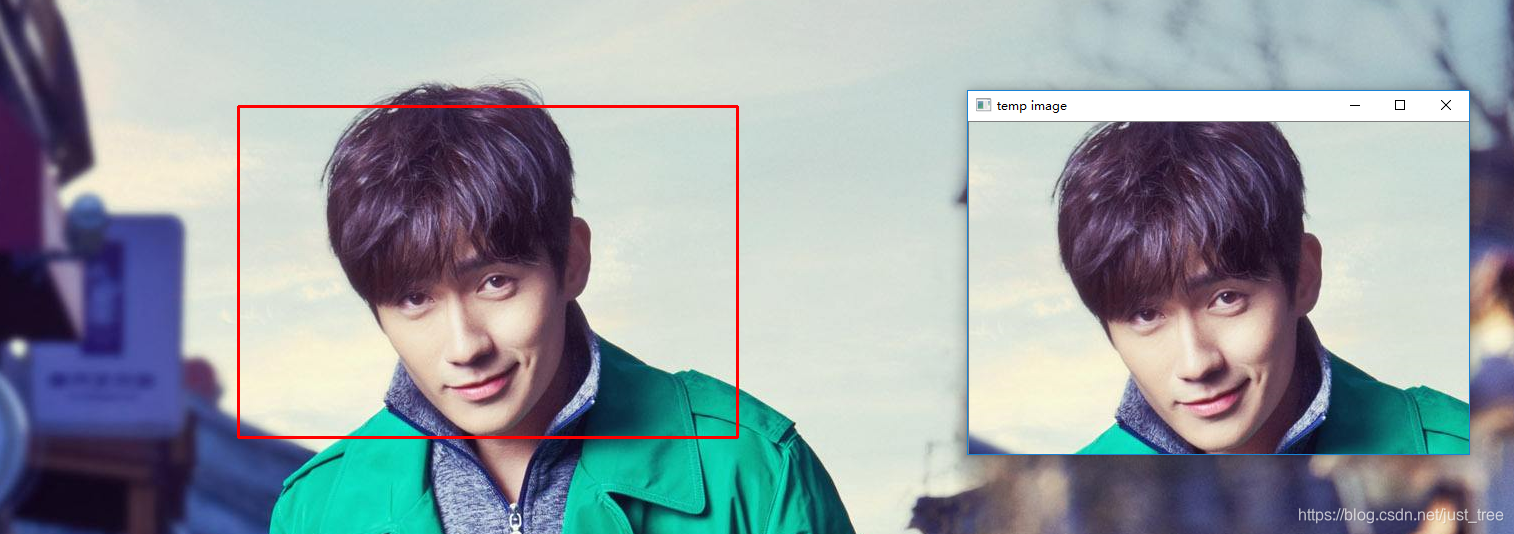
//画矩形(画出匹配位置 最匹配"点"加上temp模板大小即为匹配位置)
rectangle(dst, Rect(temloc.x, temloc.y, temp.cols, temp.rows), Scalar(0, 0, 255), 2, 8);
rectangle(result, Rect(temloc.x, temloc.y, temp.cols, temp.rows), Scalar(0, 0, 255), 2, 8);
imshow(match_t, dst);
imshow(OUTPUT_T, result);
}

















 326
326

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









