




 本文档详细介绍了Ubuntu16.04系统的基本操作,包括终端命令使用、火狐浏览器语言设置、开机默认系统调整、双系统时间同步、Terminator分屏工具、ZSH shell安装、ROS镜像源更换及ROS安装教程,覆盖从系统配置到高级应用的全面指南。
本文档详细介绍了Ubuntu16.04系统的基本操作,包括终端命令使用、火狐浏览器语言设置、开机默认系统调整、双系统时间同步、Terminator分屏工具、ZSH shell安装、ROS镜像源更换及ROS安装教程,覆盖从系统配置到高级应用的全面指南。
ubuntu16.04入坑
1.终端基本命令行
以下的命令了解一下就好
sudo apt-get + //sudo表示最高权限,apt-get是一个包的管理工具
update - //取回更新的软件包列表信息
upgrade - //进行一次升级
install - //安装新的软件包
remove - //卸载软件包
purge - //卸载并清除软件包的配置
autoremove - //卸载所有自动安装且不再使用的软件包
dist-upgrade - //发布版升级,见 apt-get
dselect-upgrade - //根据 dselect 的选择来进行升级
build-dep - //为源码包配置所需的编译依赖关系
clean - //删除所有已下载的包文件
autoclean - //删除已下载的旧包文件
check - //核对以确认系统的依赖关系的完整性
source - //下载源码包文件
download - //下载指定的二进制包到当前目录
changelog - //下载指定软件包
2.修改火狐浏览器的语言设置
(英语棒的小伙伴们可以看下一条惹)
事实上火狐英文版是不带有中文的语言包的,但是我们可以从这里开始下载中文包
http://ftp.mozilla.org/pub/firefox/releases/61.0.1/linux-x86_64/xpi/
选取zh-CN.xpi,然后点击允许即可。
3.修改开机默认系统
在装完Ubuntu之后,系统默认的开机启动为Ubuntu16.04,若要修改,可先进入Ubuntu系统,打开终端,输入
sudo gedit /etc/default/grub
再enter确认,输入密码即可打开grub文件,修改文本如下
GRUB_DEFAULT=0//将0改为saved,这里是更改是“沿袭上一次开机的默认开机系统”
GRUB_TIMEOUT=10//将10改为5,这里是更改选择系统的等待时间,单位为秒
在文本末尾添加
GRUB_SAVEDEFAULT=true
保存并推出
在终端分别输入
sudo update-grub
sudo reboot
这时候系统重启,选择默认启动的系统,则下一次启动的时候会默认该系统
4.双系统时间同步
双系统时间同步一直是一件很麻烦的事情,由于Linux把硬件时间当作UTC,操作系统的显示时间是硬件时间经过换算得来的,在windows中显示的是:硬件时间+8,故导致了双系统时间不同步
网上的解决方法基本是修改
sudo gedit /etc/default/rcS
更改
UTV=yes//将yes改为no
然鹅,在Ubuntu16.04中并没有UTC的选项
我的解决办法是这样的
sudo apt-get install ntpdate
sudo ntpdate time.windows.com
sudo hwclock --localtime --systohc
从新进入Windows发现时间恢复正常了
5.terminator分屏神器
用这三条代码即可安装
sudo add-apt-repository ppa:gnome-terminator
sudoapt-get update
sudo apt-get install terminator
装完之后,在终端之中输入
terminator
即可运行
6.装逼神器zsh安装
shell是一种独立的处理程序,能将输入的内容解释为命令,运行程序并将结果返回终端。而zsh被称为是shell中的极品。那么,zsh怎么安装呢?
还是不要安装了,初学者没啥用
6.ROS换源
一个好的镜像源可以让update 的速度大大提升
第一步:备份原来的源文件
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
第二步:换源
先输入这一条命令,打开镜像源文件
sudo gedit /etc/apt/sources.list
清华源
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-security main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-security main restricted universe multiverse
第三步:更新
sudo apt-get update
7.ROS的安装
ROS-kinetic版本官网链接
注:安装步骤完全按照官网上面来。
若出现“下列软件包有未满足的依赖关系”“下载失败”类似问题,就多试几次,极可能是之前的没下好,实在不行试试使用aptitude(不建议)
aptitude与 apt-get 一样,是 Debian 及其衍生系统中功能极其强大的包管理工具。与 apt-get 不同的是,aptitude在处理依赖问题上更佳一些。举例来说,aptitude在删除一个包时,会同时删除本身所依赖的包。这样,系统中不会残留无用的包,整个系统更为干净。
当以上所有步骤完成以后,输入
roscore
当出现
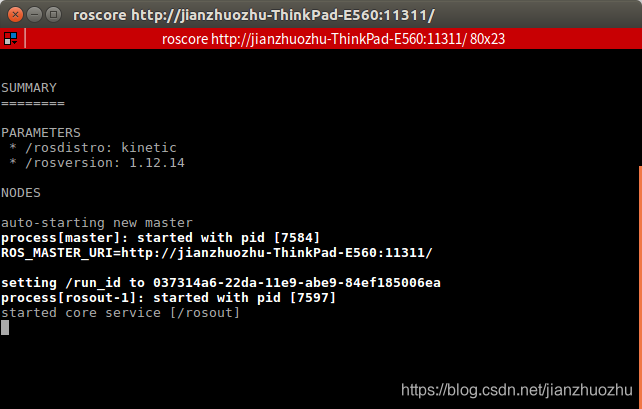
就表明了ROS正在电脑里正常运行啦
搜狗输入法
详见:
https://blog.youkuaiyun.com/yimixgg/article/details/80672452
两台脑之间的ros通信
ubuntu18.04的网线直连的方式,亲测有效
https://blog.youkuaiyun.com/qq_37719268/article/details/79019044

















 5703
5703

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









