




RoboDK 自定义机器人
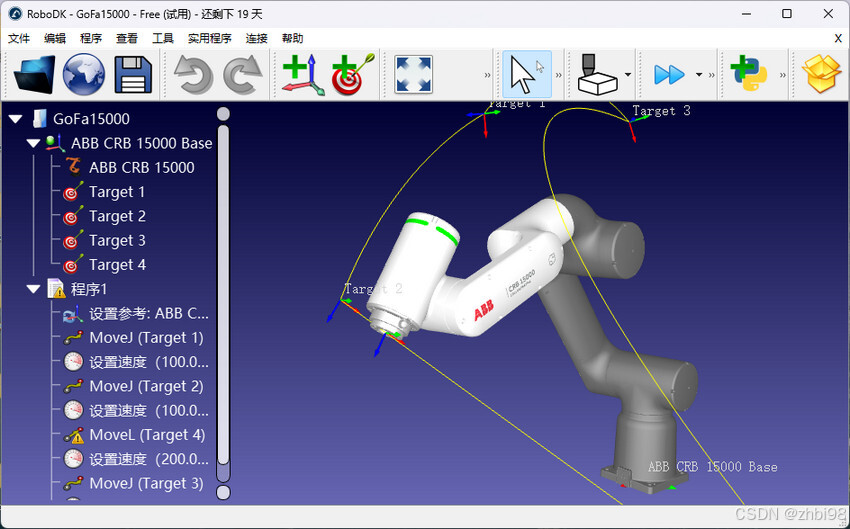
我们看到的 RoboDK 通常是这样的:比如 ABB 机器人连接到 RoboDK,RoboDK 会显示 ABB 机器人的仿真模型,和实时状态参数,模型姿态和机器人保持同步,拖拽模型机器人会跟随同步运动。
1. 自定义功能
RoboDK 支持用户自定义添加机器人模型,把自制的机器人添加到 RoboDK,自制机器人就可以达到 ABB 机器人的使用效果。
自定义机器人涉及以下几点:
(1) 构造机器人 3D 模型,把 RoboDK 的显示模型定制成你的机器人,显示同步。
(2) 配置关节运动以及 DH 结构参数,确保发送到机器人的参数是正确的。
(3) 基于 Python 适配通信驱动,和控制协议(把 RoboDK 的控制协议转换成你的控制协议)。
2. 处理 3D 模型
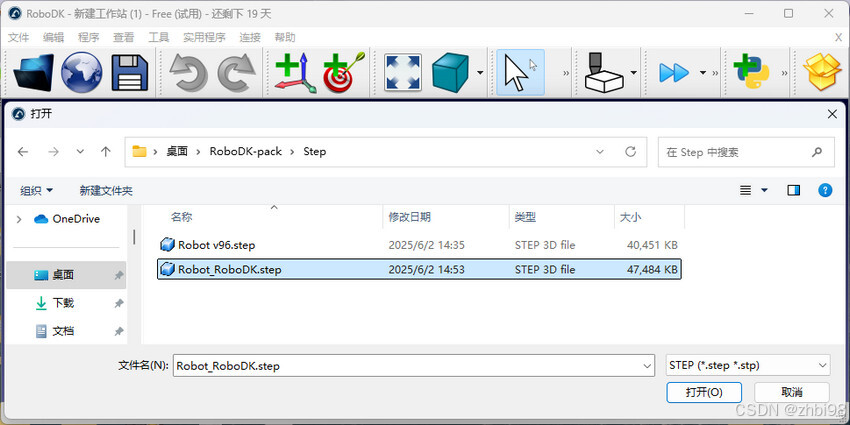
(1) RoboDK 支持直接导入 step 文件(不要求 Unified Robot Description Format,URDF 格式)。用专业 CAD 软件处理掉内部复杂细节(因为在 RoboDK 中处理大量部件通常不是很方便),再整体导出 step,再导入 RoboDK,如下。
(2) 用 RoboDK 模型分割工具以零件为单位分割整体(因为关节连接部分需要保持活动,所以要分割)如下。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2204
2204




 到【灌水乐园】发言
到【灌水乐园】发言







